
Fターム[5B080CA00]の内容
イメージ生成 (11,603) | システム (1,367)
Fターム[5B080CA00]の下位に属するFターム
Fターム[5B080CA00]に分類される特許
1 - 20 / 215
画像形成装置、情報処理方法及びプログラム
画像形成装置、方法及びプログラム
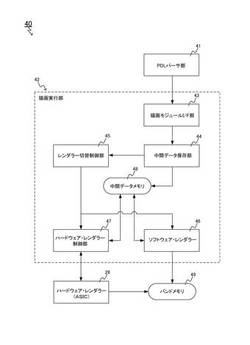
【課題】本発明は、描画時間を自動最適化する新規な画像形成装置、方法及びプログラムを提供することを目的とする。
【解決手段】本発明の画像形成装置におけるレンダラー切替制御部は、未処理の中間データについてHW描画不可コマンドの有無を検出し、検出したHW描画不可コマンドまでに存在する全ての描画コマンドをソフトウェアで描画するのに要する第1の時間を予測する手段と、検出したHW描画不可コマンドまでに存在する描画コマンドについてハードウェアとソフトウェアで描画するのに要する時間であって、レンダラー切り替えに伴うオーバーヘッドを含む時間である第2の時間を予測する手段と、第1の時間が第2の時間より大きい場合に、当該描画コマンドについてハードウェアとソフトウェアで描画させる手段と、第1の時間が第2の時間より大きくない場合に、当該描画コマンドをソフトウェア・レンダラーに描画させる手段とを含む。
(もっと読む)
複数のデクセルによって表わされるモデル化ボリュームの設計

【課題】複数のデクセルのセットによって表されるモデル化ボリュームを設計するための改良型解決法を提供する。
【解決手段】改良型解決法には、複数の始線に基づくモデル化ボリュームを表す複数のデクセルの初期セットをスカルプチャ生成するステップS10と、複数の始線を精緻化することによって複数の新しい線を提供するステップS20と、スカルプチャ生成プロセスを経た後の、複数の新しい線に基づくモデル化ボリュームを表す複数のデクセルの新しいセットを決定するステップS30が含まれている。この方法によれば、複数のデクセルのセットによって表されるモデル化ボリュームの設計が改善される。
(もっと読む)
超音波診断装置、超音波画像処理装置及び超音波画像処理プログラム
【課題】 三次元的に解析された心壁運動情報を用いて、心臓の機械的な興奮の時空間的伝搬の様子を直接的に把握し解析可能な情報を提供し、主に虚血性疾患等の診断を支援する超音波診断装置等を提供すること。
【解決手段】 第1の時刻を基準として第1の期間に亘って収集された複数のボリュームデータである第1のボリュームデータ群を用いて、前記第1の期間に亘る第1の組織運動情報を生成する組織運動情報生成手段と、所定の時刻における前記第1の組織運動情報においてピークを有するピーク部位の位置を検出する処理を各時刻について行い、前記各時刻について検出された前記ピーク部位の経時的推移を示す第1の興奮伝搬情報を生成する伝搬情報生成手段と、前記第1の興奮伝搬情報を表示する表示手段と、を具備する。
(もっと読む)
3次元形状データ処理方法、3次元形状データ処理装置
【課題】3次元形状に対応するデータファイルのサイズを小さく、転送や取り扱いを容易とする。
【解決手段】レーザ光200の走査によって構成される面(走査面)と3次元形状をもつ対象物300との交線上に、各測定点は離散的に存在する。この3次元形状データ処理方法においては、データとして、3次元空間座標の点群データの代わりに、各走査面上における各測定点の平均位置Gnの空間的位置、走査面における座標軸Un、Vn軸の方向、各測定点Pn,i(1≦i≦k)についての、走査面での2次元座標(un,i、vn,i)を記録する。ただし、この2次元座標を記録する代わりに、後述する符号化された値を記録することもできる。
(もっと読む)
印刷装置、印刷装置の制御方法、画像処理装置及びプログラム
【課題】 プリント解像度以上に細かいオブジェクトを大量に含む印刷情報から生成される中間データに対するRIPのレベル処理におけるデータ処理負担を軽減して、印刷処理に要する時間を短縮する。
【解決手段】 入力される印刷情報から生成される中間データを解析して得られるオブジェクトに描画処理を行う印刷装置であって、所定のライン方向に整列された前記オブジェクトについてエッジの幅と、エッジのレベルと、エッジの向きを調べて重なり合うオブジェクトのうち、描画処理を省略できるオブジェクトを検出する。そして、検出したオブジェクトについてオブジェクトリストへの追加または削除を行わないことを特徴とする。
(もっと読む)
画像通信システム及び端末装置並びにプログラム
【課題】本体画像に合成表示されるアクセサリ画像を生成する場合に、識別力の高いアクセサリ画像を生成できるようにする。
【解決手段】本体画像(キャラクタ)にアクセサリ画像を合成して表示する携帯電話機1とサーバ装置5とが通信ネットワークを介して画像の送受信を行う画像通信システムであって、携帯電話機1側で撮像部15により被写体を撮影すると、撮影された画像内の被写体をキャラクタの識別用の画像として認識し、サーバ装置5は、この認識された識別画像に基づいてアクセサリ画像を生成する。携帯電話機1は、生成されたアクセサリ画像を本体画像(キャラクタ)に合成表示させる。
(もっと読む)
画像表示端末及びプログラム
【課題】背景画像に対応したグラフを受信した際に、同じ背景画像に対応して適切にグラフを表示する。
【解決手段】他の関数電卓1との間で同一の背景画像を表示可能な関数電卓1は、表示画面内に背景画像を表示する表示部15と、表示画面における背景画像の表示領域に対し、XY座標系のうち、所定の表示範囲の部分を設定するとともに、他の関数電卓1に当該表示範囲を送信し、当該他の関数電卓1の表示画面における背景画像の表示領域に対し、当該XY座標系のうち、当該表示範囲の部分を設定させるCPU11と、他の関数電卓1から、当該他の関数電卓1において背景画像上に表示されたグラフ図形のグラフ式を受信する通信部16とを備える。CPU11は、グラフ式を受信した場合に、当該グラフ式のグラフ図形を背景画像上に表示させる。
(もっと読む)
画像処理装置及びプログラム
【課題】撮像手段によって撮像された撮像画像に含まれる人物の画像が貼り付けられるオブジェクトと撮像画像に含まれる背景の画像が貼り付けられるオブジェクトとが配置される仮想空間を仮想カメラから見た画像、がユーザに与える違和感を緩和する。
【解決手段】制御部は、カメラにより撮像された撮像画像のうちで人物が写っている人物領域を特定し(S102)、人物領域の画像を示す人物テクスチャ画像を生成し(S103)、人物領域の少なくとも一部を内部に含むスポット領域を設定し、スポット領域のうち人物領域を除く領域の画像を示す背景テクスチャ画像を生成する(S107)。
(もっと読む)
画像生成装置
【課題】表情豊かな画像を生成する画像生成装置を提供する。
【解決手段】 画像生成装置は、眼オブジェクトと、窓部を有する顔オブジェクトと、を仮想空間内に配置して画像表示装置に表示する画像を生成する画像生成装置であって、前記眼オブジェクトの表面は、第一の方向と、前記第一の方向に直交する第二の方向で曲率を異ならせるものであり、前記第二の方向の曲率は、前記第一の方向の曲率よりも大きい曲率とするものであり、前記第一の方向の曲率は、0とするものである。
(もっと読む)
グラフ関数表示装置およびプログラム
【課題】グラフ関数電卓において、移動体画像に対応したグラフを重ねて表示した際に、概念的な目盛に応じたグラフと現実的な目盛に応じたグラフとを容易に連携学習させる。
【解決手段】移動物体b1,b2,…,bnの連写合成画像Gbasを対象にした画像座標範囲設定機能および前記連写合成画像Gbasに重ねた移動体軌跡のグラフ関数表示機能によれば、グラフ表示の横軸Xの座標目盛が連写間隔に相当する移動物体b1,b2,…,bnの各位置に合わせて描画される補助線h1,h2,…,hnに基づき設定され、X座標値を、単純な整数値0,1,2,…の座標目盛に応じた基準座標レンジ(XSmin〜XSmax)と、移動物体b1,b2,…,bnの連写間隔に相当する実測値(連写時間間隔Δtまたは移動距離Δx)に換算した実測座標レンジ(XRmin〜XRmax)とに基づいて表示する。
(もっと読む)
画像処理装置および画像処理方法、プログラム
【課題】 形状推定を行った後に、推定した形状情報を用いて質感推定を行うと、形状推定の誤差が大きい場所で質感推定が不正確となる。
【解決手段】 多視点画像データから被写体の形状を推定し、推定された形状の確からしさを示す信頼度を算出し、推定された形状と信頼度と多視点画像データとから、少なくとも二つの方向から観察した際の被写体の反射率を示す質感情報を推定する画像処理装置。
(もっと読む)
グラフ構造を有するデータから頻度の高い部分構造を抽出する方法、その装置およびプログラム
【課題】データベース中のグラフにおける互いに非連結な連結部分グラフ同士の関係を区別して頻度の高い組合せを抽出すること。
【解決手段】グラフデータベース中のグラフから同型性判定による頻度の高い部分構造をサブパターン候補として抽出してサブパターン記憶手段に保存し(s1)、サブパターン記憶手段2が保持するサブパターン候補の中からサブパターンを選択してサブパターン記憶手段2に保存し(s2)、グラフデータベース中のグラフにおいてサブパターン記憶手段が保持するサブパターンに該当しない箇所を匿名化および統合して縮約済グラフ記憶手段に保存し(s3)、縮約済グラフ記憶手段が保持するグラフから同型性判定による頻度の高い部分構造を連結グラフとして抽出して頻出部分構造記憶手段に保存し(s4)、頻出部分構造記憶手段が保持する連結グラフをその頻度とともに表示する(s5)。
(もっと読む)
画像処理装置及び画像処理方法
【課題】 オブジェクトを重ね描きする同一開始位置に重複するエッジを削除し、高速にオブジェクトの描画処理を行える装置及び方法を提供する。
【解決手段】 オブジェクトを描画処理する画像処理装置において、オブジェクトを重ね描きする同一開始位置に閾値以上、エッジが重複するか否かを判定する。そして、エッジが重複すると判定された場合に、当該重複するエッジを削除する。
(もっと読む)
幾何学的三次元モデルオブジェクトを設計する方法
【課題】従来の三次元モデルオブジェクトを設計方法には、スケッチがなおも用紙で行われスケッチステップとトレーサステップとが統合されない、取り込まれる描画が2D描画のみでありこの2D描画から幾何学曲線を推測するしかない、幾何学曲線を計算するのにいくつかのコンピュータを使用するため計算リソースを多く必要とする、等の問題があった。
【解決手段】三次元モデルオブジェクトを設計するためのコンピュータ実装される方法であって、画面とのユーザ相互作用のステップと、ユーザ相互作用に対応するストロークを定義するステップと、ストロークをポイントの集合に離散化するステップと、ポイントの集合を三次元シーンの少なくとも1つのサポート上に映し出すステップと、映し出されたポイントの集合および少なくとも1つのサポートから三次元モデルオブジェクトを構築するステップとを備える方法。
(もっと読む)
ナビゲーション装置用データベース、地形の三次元表示を出力する方法、およびデータベースを生成する方法
【課題】ナビゲーション装置用のデータベース(10)を提供すること。
【解決手段】上記データベースは、三次元表面を定義するデジタル標高モデルデータを含む。データベース(10)は、タイリングの複数のタイルのために、複数の不整三角網、TINの頂点の三次元座標を含む第1の配列(23)、および複数の第2の配列(24、25)を記憶する。各第2の配列(24、25)はそれぞれTINの三角面を定義し、前記それぞれのTINの三角面を定義するために頂点の複数の頂点インデックスを含む。地形の三次元表示を出力する方法、およびデータベースを生成する方法も説明される。
(もっと読む)
情報処理装置およびその方法
【課題】 積層構造をもつ板状の部品から形成される構造物の三次元形状を効率的に作成する。
【解決手段】 三次元構造物の二次元展開図データを取得する(S101)。波状形状を有する内部部材を含む積層構造を有する板状部品の層構成情報、および、二次元展開図データが示す折曲部の折曲情報を入力する(S102)。二次元展開図データの座標に対して、内部部材の形状が変化しない方向を示す主軸方向を設定する(S103)。二次元展開図データが示す各面に、層構成情報および主軸方向を表す情報を付加する(S104、S105)。二次元展開図データおよび折曲情報を用いて、三次元構造物の三次元形状を作成する(S105)。そして、各面に付加された層構成情報および主軸方向を表す情報を用いて、三次元形状が示す各面に、板状部品の積層構造の形状を付加した三次元モデルを作成する(S106)。
(もっと読む)
画像形成装置
【課題】 従来のRIPのエッジ処理は、エッジが垂直(X座標が不変)であっても、各Y座標でX座標の計算を行っていた。そのためエッジのX座標計算に不要な時間が掛かっているという第1の課題がある。また、エッジ開始とともにエッジ処理で使用するメモリを逐次確保し、終了とともにメモリを逐次解放することを行っていた。そのため、メモリ領域が離散的に使用されキャッシュ効率が悪いという第2の課題がある。
【解決手段】 第1の課題を解決するために中間データからエッジを読み込むときに、エッジのX座標の変化量から垂直エッジか否かを判断し、垂直エッジと判断されたら、通常のエッジとは別にして管理する。第2の課題を解決するために中間データからエッジを読み込むときに、エッジのペアを検出する。エッジのペアを検出したら、エッジのペアの更新情報をまとめて一つの構造体で管理する。
(もっと読む)
表示装置、配信サーバ、及び表示制御方法
【課題】レンダリング照明データの付加されていない絵画の表示データに対し、絵画の作品名又は絵画が展示されている所在地の情報を含む絵画情報を用いてレンダリング照明データを特定し、色再現処理を行うこと。
【解決手段】絵画データ取り込み部102は、絵画の作品名又は絵画が展示されている所在地の情報を含む絵画情報を取得する。美術館レンダリング照明データベース部107では絵画情報に対してレンダリング照明データを関連付けて管理する。レンダリング照明データ決定部106は、絵画の表示データにレンダリング照明データが付加されていない場合、絵画情報を用いて美術館レンダリング照明データベース部107で管理されるレンダリング照明データを検索し、絵画情報に対応するレンダリング照明データを特定する。色処理部108は、特定されたレンダリング照明データを用いて色再現処理を行って絵画の表示データを表示部109に出力する。
(もっと読む)
仮想脳外科手術シミュレータ
【課題】三角形メッシュで構成されている一般的な仮想脳モデルに対しても仮想吸引シミュレーションが可能なシミュレータを実現する。
【解決手段】病変部位を吸引する脳外科手術を仮想的にシミュレーションする仮想脳外科手術シミュレータであって、吸引された部位の境界を算出するために、球の方程式で仮想脳モデルを構成する三角形メッシュを切断する第1のステップと、切断された三角形メッシュの中で境界で生成された細い三角形メッシュを除去する第2のステップと、吸引された部位の曲面を三角形メッシュ化するために必要な点の座標を計算する第3のステップと、前記第3ステップで計算した点を繋げて三角形メッシュを生成する第4のステップからなる。
(もっと読む)
1 - 20 / 215
[ Back to top ]