
Fターム[5D096BB01]の内容
トラック探索、整列のためのヘッド移動 (3,141) | 第1実施例の主情報トラックの形状 (308) | 同心円状 (287)
Fターム[5D096BB01]に分類される特許
41 - 60 / 287
記憶媒体、記憶媒体のトラック位置検出方法および記録装置
【課題】サーボパターンの長さを短くすることができる記憶媒体、記憶媒体のトラック位置検出方法および記憶媒体のトラック位置検出プログラムを提供する。
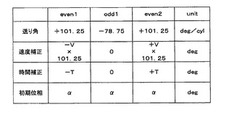
【解決手段】 トラックの径方向における位置を示すポジションがトラックに記憶された記憶媒体であって、ポジションは、トラック間の位相差を示す送り角が+90°に所定の角度を加えた角度であるポジション領域even1と、送り角が−90°に前記所定の角度を加えた角度であるポジション領域odd1と、送り角が、ポジション領域even1と同様であるポジション領域even2とを有する。
(もっと読む)
ディスク・ドライブ及びそのエラー回復処理の方法

【課題】シーク・エラーからのエラー回復率を向上する。
【解決手段】本発明の一形態において、HDD1は、シーク・エラーが発生すると、そのエラー回復処理を行う。シーク・エラー回復処理において、HDDは、エラーを起こしたシークのシーク方向に応じたエラー回復ステップを実行する。具体的には、HDD1は、ターゲット半径位置に対して、エラーを起こしたシーク処理と逆方向における再シークを実行する。これにより、サーボ・データ欠陥領域を避けてターゲット位置に再シークすることができ、サーボ・データ欠陥領域によりシーク・エラーが繰り返し発生することを避けることができる。
(もっと読む)
熱ドリフトを補正する閉ループ位置付けシステムを持った磁器ヘッド/ディスクテスター
【課題】磁気ディスクに対する磁気ヘッドの位置付けにおいて発生する熱ドリフトを補正する。
【解決手段】磁気ヘッドの大まかな位置付けを行うステップモーターと、細かな位置付けのために使用されるピエゾアクチュエーター37を含む。往復台の両側に配置された直線エンコーダー40及び42は、ピエゾアクチュエーターを制御する閉ループ位置付けシステムへフィードバック情報を供給する。サーボバーストは、同じ閉ループ位置付けシステムのための付加的なフィードバックの情報源として使用される。指示された命令位置への磁気ヘッドの移動の間、サーボバーストフィードバックはオフにされ、ヘッドを移動させるために、直線エンコーダーからのフィードバックがPIDループによって使用される。磁気ヘッドが指示された命令位置に到達したとき、予め書き込まれたバースト信号の比が一定に保持されるように、PIDループの命令位置を変化させる。
(もっと読む)
磁気記憶媒体及び情報記憶装置
【課題】トラックアドレス情報の読み取り精度を向上する。
【解決手段】 磁気ディスクが、トラック内の複数のセクタそれぞれに設けられた、トラックアドレス情報が記録されるサーボ領域30と、当該サーボ領域とともに複数のセクタ内のそれぞれに設けられたデータ領域32と、を備えており、トラックアドレス情報のうちのアドレス下位ビットパターンと同一のパターンである、複製下位ビットパターンを、サーボ領域30及びデータ領域32の少なくとも一方に記録する。これにより、アドレスの読み取りエラーが発生した場合でも、複製下位ビットパターンの情報(アドレス値)を読み取ることで、トラックアドレスの再生精度を向上することが可能である。
(もっと読む)
ディスクドライブのためのウェッジオフセット補正値の決定
【課題】 データ記憶ディスクの最小回転数でウェッジオフセット補償値を決定する。
【解決手段】ディスクドライブ110では、ウェッジベースのスキームがこのディスクドライブ110のトラックに対するウェッジオフセット補正値を決定するために用いられる。各サーボウェッジのオフセットに対する補正値は、最も最近測定されたサーボウェッジの位置誤差信号(PES)およびこれに組み合わされる他の複数のサーボウェッジの測定PESに基づいてウェッジ毎に計算される。サーボの搬送遅れを最小化するため、ほとんどのサーボ制御計算は現在のウェッジでのPES測定に先立って予め計算されることになる。与えられたサーボウェッジに対するウェッジオフセット補正値は、記憶ディスクの各回転で反復して補正される。
(もっと読む)
磁気記録媒体および磁気再生装置
【課題】いわゆるビットパターンドメディアにおいて、再生ヘッドによるデータ読取りに際して再生ヘッドの位置補正を行うのに適した磁気記録媒体、および、そのような磁気記録媒体を備える磁気再生装置を提供する。
【解決手段】磁気記録媒体Y1は、一列に並ぶ複数の磁性部22を含むデータ部R2と、磁性部22の配列方向においてデータ部から離隔するサーボ部R1と、サーボ部R1およびデータ部R2の間に位置し且つ少なくとも一つの磁性部23を含む再生出力確認部R3とを備える。磁性部22,23は、トラック中心線T2に沿って一列に位置し、トラック中心線T2に直交する方向における磁性部22,23の中心位置は、トラック中心線T2上に位置する。トラック中心線T2に直交する方向において磁性部23は磁性部22より長い。
(もっと読む)
パターンド媒体のサーボパターンの配置方法及び情報記憶装置
【課題】ビットパターンド媒体を搭載する磁気ディスク装置において、サーボ領域のサーボパタンを磁化反転のないように形成する。
【解決手段】データ領域とサーボパターン領域とを有するビットパターンド記憶媒体のサーボパターンの配置方法であって、サーボ領域に埋め込むアドレス情報を半径方向に複数に分断して分断アドレス情報を作り、各分断アドレス情報を独立情報として作成した復調値を分断復調値とし、最下位グループのアドレス情報は変更せず、或るグループの新アドレス情報を、1つ下位のグループの新アドレス情報に基づく分断復調値と、或るグループの新アドレス情報に基づく分断復調値の論理和が、或るグループの元の分断アドレス情報に基づく分断復調値になるようにして求め、得られた新アドレス情報に基づいて、サーボパターンを定める。
(もっと読む)
情報記録再生装置、制御装置および情報記録再生方法
【課題】トラックピッチの変動を原因とした読出しエラーを防止するとともに、あるトラックに書き込まれるべきデータが隣接するトラックに上書きされてしまう危険性を低減することを課題とする。
【解決手段】位置決め制御部152は、ディスク120からデータを読み取る際に、ディスク120のトラックピッチ変動を原因として、いわゆるコアずれ補正量に生じる補正誤差を加味し、ヘッドの位置決めを制御する。位置決め制御部152は、トラックピッチ変動を加味しない場合のコアずれ補正量dに、補正誤差Δdを足し合わせた値dr=「d+Δd」を求めることで、トラックピッチ変動を加味した時のコアずれ補正量を算出する。
(もっと読む)
磁気ハードディスクドライブおよびその運転方法
【課題】 実行処理の高速化と記憶スペースの削減とを図りつつ、HDDにおけるRROの影響を最小限にする。
【解決手段】 トランスデューサ13からの位置信号75は、基準位置信号70と加算(引算)され、位置エラー信号(PES)80が得られる。PES80は、現サーボウェッジにおける現補正の実行のために制御部60に入力されると共に、フィードフォワードアルゴリズム部50にも入力される。フィードフォワードアルゴリズム部50は、RROのみに起因するトランスデューサ位置ずれ分を示すフィードフォワード値を反復合算により算出し、その結果を、その次のサーボウェッジ用のフィードフォワードRRO補正項として出力する。このフィードフォワードRRO補正項は、制御部60から出力される補償出力と加算され、その加算結果100が、制御信号としてプラント200のボイスコイルモータに供給される。
(もっと読む)
磁気ディスク装置およびトラッキング制御回路
【課題】パターンドメディアに対するトラッキング制御を正確に実行することができる磁気ディスク装置を提供する。
【解決手段】試し書き位置移動制御手段は、サーボ領域を読み取ることで所望とする記録トラックT2のトラック位置を仮決めし、その仮決めされたトラック位置からトラックピッチTpの半ピッチ分Tp/2ずれた所定の試し書き位置に磁気ヘッドを合わせるように制御する。試し書き情報記録制御手段は、ユーザ領域Uの一部に対して所定の試し書き情報を書き込むように制御する。試し書き情報の書き込み後、試し書き記録状態検証手段は、試し書き情報が記録トラックT1,T2の2列に記録された状態か1列に記録された状態かを検証する。ヘッド位置ずれ調整手段は、2列に記録された状態か1列に記録された状態に応じて所望とする記録トラックに対する磁気ヘッドの位置ずれを調整する。
(もっと読む)
磁気記憶媒体、情報記憶装置及び制御装置
【課題】磁気ヘッドのオフトラックに対する位置決め制御を精度よく行なうことができる磁気記録媒体、情報記憶装置および制御装置を提供する。
【解決手段】磁性ドット18が互いに千鳥格子状に形成されるとともに、トラック中心17を対称軸として、反転するように形成された2個のプリアンブル32とプリアンブル33によるオフトラック時の位相差により検出した磁気ヘッド13の変位量に基づいて、磁気ヘッド13の位置制御を行なう。
(もっと読む)
磁気ディスク装置および磁気ディスク装置製造方法
【課題】フォーマット容量を向上させるとともに、使用できなくなるトラック数を最小にすることを課題とする。
【解決手段】磁気ディスク装置に組み込まれる磁気ディスク10は、半径方向に複数の領域に分けられて、一つの領域には、インナ用に低い周波数でサーボ情報が書き込まれ(実線で囲まれる領域)、もう一つの領域には、アウタ用に高い周波数でサーボ情報が書き込まれている(点線で囲まれる領域)。このような磁気ディスク10を保持すると、磁気ディスク装置は、磁気ディスク10の回転中心を中心とした同心円状の軌道を作成するとともに、読込むサーボ情報を切り替える境界となる境界トラックを決定する。そして、磁気ディスク装置は、境界トラック7により分けられる領域ごとに、読み取りとしては採用しないサーボ情報を削除する。そして、切り替えトラックを含む3トラックを未使用領域とし、削除した領域をデータ領域として再利用する。
(もっと読む)
磁気ディスク装置、トラッキング制御方法、およびトラッキング制御回路
【課題】パターンドメディアに対するトラッキング制御を高精度かつ高速に行うことができる磁気ディスク装置およびトラッキング制御方法を提供する。
【解決手段】磁気ディスク装置は、磁気ディスク1の回転中、再生素子2Aを介して複数列の記録トラックを2列ずつまとめて読み取ることにより、その各列に含まれる複数の磁性ドットdに応じた磁気読み取り信号を取得する磁気読み取り信号取得手段10と、磁気読み取り信号から記録トラックの各列に応じた2列分のトラック分離信号を生成するトラック分離信号生成手段20と、トラック分離信号のそれぞれを絶対値化してトラック絶対値信号を生成するトラック絶対値信号生成手段31,32と、トラック絶対値信号の差分を求めてトラック差分信号を生成するトラック差分信号生成手段40と、トラック差分信号に基づいて磁気ヘッド移動機構5を制御する磁気ヘッド移動制御手段60とを備えている。
(もっと読む)
磁気記録媒体、磁気記憶装置および磁気記録媒体の製造方法
【課題】簡易な構成で、出力が大きく、安定なサーボパターンを形成すること。
【解決手段】サーボパターンを第1パターン群と第2パターン群に分け、サーボ情報エリアでは磁気ヘッドの進行方向に対して第1パターンと第2パターンとを交互に配置し、サーボ情報エリア以外の場所において前記第1パターンのみを配置した所定領域を設け、全ての第1パターンが所定領域に配置された部分とサーボ情報エリアに配置された部分とを有するように構成する。かかるサーボパーンに対し、一旦全体を同一方向に磁化した後、所定領域を選択的に磁化することで、第1パターン群と第2パターン群との磁化方向を反転させる。
(もっと読む)
磁気記録媒体、磁気記録再生装置および磁気記録再生装置の信号処理方法
【課題】トラッキングサーボ情報としてトラッキングサーボパターンを高密度で形成することができ、磁気ヘッドを磁気記録トラックの中央に精度よく位置付けできるものとなるとともに、磁性層からなるパターン形状を形成する際に用いられるレジストパターンを高精度で形成することができ、歩留まりよく製造できる磁気記録媒体を提供する。
【解決手段】非磁性基板上に磁気的に分離された磁性層からなる環状の磁気記録パターン51aが備えられ、磁気記録パターン51aの一部に、前記磁気記録パターン51aの中央と側部との距離を片側のみ異ならせてなるトラッキングサーボパターン33がトラッキングサーボ情報として形成されている磁気記録媒体50とする。
(もっと読む)
周波数制御装置および記憶装置
【課題】サーボマークの検出ミスが発生した場合であっても、処理負荷少なく周波数補正量を算出する。
【解決手段】サーボフレームごとに計測されたクロック信号数を離散フーリエ変換して算出された偏心成分を予め記憶部に記憶しておく。さらに、記憶部に記憶されている偏心成分を用いてサーボフレームに対応するクロック信号数を算出し、算出したクロック信号数を用いて、サーボフレームに対応する周波数補正量を算出する。そして、算出した周波数補正量に応じて、周波数発振器においてクロック信号の発振に用いられる周波数が調整されるように周波数発振器の動作を制御する。
(もっと読む)
磁気記憶装置、ヘッド試験方法、ヘッド試験装置
【課題】サイドイレーズに関する測定においてリード用データパターンのライトによるサイドイレーズの影響を低減する磁気記憶装置、ヘッド試験方法、ヘッド試験装置を提供する。
【解決手段】磁気媒体のトラック方向に区切られる複数の区間とトラック方向に沿う所定の基準経路とを設定すると共に、基準経路に対するヘッドの位置であるオフセットについて隣接する区間同士のオフセットが異なるように区間毎に少なくとも1つのオフセットを設定する設定部33と、設定部により設定された区間毎のオフセットへ第1データパターンをライトし、基準経路へ所定の回数だけ第2データパターンをライトするライト部と、ライト部によりライトされた第1データパターンをリードするリード部と、リード部によりリードされた第1データパターンのそれぞれの品質の測定を行う品質測定部34とを有する。
(もっと読む)
情報記憶媒体および情報記憶装置
【課題】記憶容量の増加が可能な情報記憶媒体および情報記憶装置を提供する。
【解決手段】情報記憶媒体において、基板S、および、径方向の位置を表す情報が記録されたサーボパターン22と、周方向に所定のピッチsで並んだ複数の記録ドット26とをそれぞれ有する、周方向に並んだ複数のセクタ21を有し、サーボパターン22は、記録ドット26のピッチsに対し所定の整数比を有するピッチpで周方向に並んだ磁気パターン221を有し、サーボパターンに最近接位置に配置された記録ドット26が、サーボパターンのピッチpに対し、いずれのセクタにおいても一定の位相関係φを有する位置に配置されている。
(もっと読む)
ディスク・ドライブ及びサーボ・データ検出のための処理タイミングの制御方法
【課題】、効率的な処理によってサーボ・セクタ間の時間間隔の変化に応じてタイミングを調整する。
【解決手段】本発明の一実施形態のHDDは、ユーザ・データのリードあるいはライトのためのフォローイング中にサーボ・セクタの時間間隔を測定し、その測定結果に応じてサーボ・セクタ検出のためのタイミング信号を制御する。HDDは、時間間隔の測定結果を規定の複数ゾーンの内のいずれに含まれるか特定する。過去の複数の時間間隔のゾーンによって時間間隔の変化について判定し、時間間隔の変化が規定範囲にある場合にサーボ・セクタ検出のためのタイミングを変化させる。これにより、効率的な処理によってサーボ・セクタ間の時間間隔の変化に応じてタイミングを調整することができる
(もっと読む)
磁気ディスク装置のヘッド位置決め制御方法
【課題】位相特性を改善して制御系の安定性を維持する制御方法を提供すること。
【解決手段】フィードバック制御器31は、制御対象35である磁気ヘッドを磁気ディスク上の目標位置へ移動させるための制御操作量を決定する。また、共振抑圧フィルタ33によって、制御操作量の第1の周波数成分を抑制する。共振フィルタ34によって、制御操作量の第2の周波数成分を増大させる。抑制及び増大後の制御操作量に応じて、アクチュエータがヘッドを磁気ディスク上の目標位置へ移動させる。
(もっと読む)
41 - 60 / 287
[ Back to top ]