
Fターム[5F031MA31]の内容
ウエハ等の容器、移送、固着、位置決め等 (111,051) | 処理装置 (13,378) | 工程 (11,004) | イオン注入 (188)
Fターム[5F031MA31]に分類される特許
41 - 60 / 188
イオンビーム照射装置
【課題】 多様なイオンビーム照射特性を実現することができ、しかも装置の大型化、スループットの低下および基板へのパーティクル付着を抑えることができるイオンビーム照射装置を提供する。
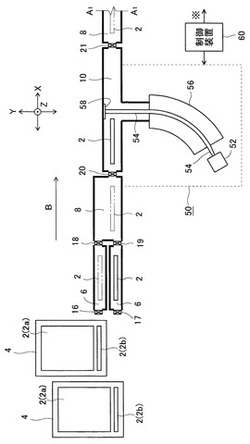
【解決手段】 このイオンビーム照射装置は、互いに直列に接続された複数の処理室10と、その一端側に接続された入口側真空予備室6と、他端側に接続された出口側真空予備室と、1枚以上の基板2を、大気中から入口側真空予備室6、複数の処理室10および出口側真空予備室を経て大気中へと搬送する基板搬送装置とを備えている。更に、各処理室10にリボン状のイオンビーム54をそれぞれ供給して、基板2の搬送と協働して、各基板2の全面にイオンビーム54をそれぞれ照射する複数のイオンビーム供給装置50を備えていて、各基板2の全面に対して複数のイオンビーム供給装置50による複数のイオンビーム照射をそれぞれ行うよう構成されている。
(もっと読む)
露光装置、露光方法、及びデバイス製造方法

【課題】焦点位置検出系などを必ずしも設けることなく、デフォーカスの殆どない基板上へのパターンの転写を実現することが可能な露光装置を提供する。
【解決手段】露光装置は、互いに独立して移動可能な第1、第2テーブルと、投影光学系の直下に液体を供給して液浸領域を形成する液浸システムと、投影光学系と第1、第2テーブルの一方との間に液浸領域が維持される第1状態から、投影光学系と第1、第2テーブルの他方との間に液浸領域が維持される第2状態に遷移するように、投影光学系の直下に液浸領域を維持しつつ、投影光学系の下方で第1、第2テーブルを共に移動する駆動システムと、を備え、第1テーブルは、基板の載置領域及びその周囲領域を有し、周囲領域と基板との隙間からの液体の流出を抑制するように周囲領域に近接させて基板を載置領域に載置し、基板は、第1テーブルによって液浸領域に対して相対的に移動される。
(もっと読む)
基板ホルダおよびクリッピング装置
【課題】本発明の目的は、微粒子による汚染を減少させることのできる基板ホルダを提供することである。
【解決手段】本発明は、基板支持体と、第1の位置においては支持体上に配置された基板と係合し、別の位置においては基板から離れて配置されるように構成された可動クリッピング手段と、クリッピング手段を第2の位置から第1の位置へ動かすための位置決め手段とを備えた基板ホルダに関する。基板が支持体上に配置されていないときにクリッピング手段と支持体との接触を防止するために、弾性停止要素が使用され、この弾性停止要素は、クリッピング手段の運動を制限する。さらに本発明は、これらの基板ホルダおよびクリッピング装置を使用したクリッピング装置およびイオン注入装置に関する。
(もっと読む)
z運動し、多関節アームを備える直線真空ロボット
【課題】小さい設置面積を維持すると共に、処理ステーション毎に個別に滞留時間を制御することができるコスト及びスループットを改善下装置及び方法を提供する。
【解決手段】線形搬送チャンバは、線形トラックと、線形トラックに乗せられて、処理チャンバの側面に沿って基板を線形に搬送するロボットアームとを含み、処理チャンバに到達させる方法として、基板を、制御された雰囲気中にロードロックを介してフィードし、次いで搬送チャンバに沿ってフィードする。線形平行移動、回転と分節、及びz運動が可能な4軸ロボットアームが開示される。
(もっと読む)
露光装置、露光方法及びデバイス製造方法
【課題】高精度な露光を実現する。
【解決手段】 サブルーチン201及びステップ205において、投影光学系PLの最良結像面及び多点AF系のオフセット成分を較正情報として検出する。ステップ215でのアライメント系ALGによるウエハアライメントマークの計測中に、多点AF系により、ウエハの露光対象面の面形状に関する情報(Zマップ)を検出し、ステップ219では、走査露光中におけるウエハステージのXYの位置指令プロファイルとともに、オートフォーカス・レベリング制御に関する位置指令(Z,θx,θy)に関するZ位置指令プロファイルを作成し、ステップ221においてその位置指令に基づいてオープン制御を行いつつ、走査露光を行う。
(もっと読む)
吸着用部材およびこれを用いた吸着装置、並びに光照射装置および荷電粒子線装置
【課題】 吸着台の吸引孔形成領域よりも小さいサイズの対象物を安定して保持することが可能な吸着用部材を提供する。
【解決手段】 吸着用部材は、複数の吸引孔が設けられた吸着台上に載置され、吸引孔による気体の吸引によって対象物を吸着する。吸着用部材は、吸着台上に着脱可能に載置される基板を有し、該基板は、対象物が載置され、吸引孔による吸引を可能にして対象物を吸着する吸着領域と、該吸着領域の外周に設けられ、複数の吸引孔の一部を覆う吸着遮断領域とを有する。
(もっと読む)
載置台構造及び処理装置
【課題】被処理体を直接的に載置する熱分散板の耐久性を向上させて破損し難くし、接続端子が腐食されないようにすることが可能な載置台構造を提供する。
【解決手段】排気が可能になされた処理容器32内に設けられて処理すべき被処理体Wを載置するための載置台構造において、被処理体を加熱する加熱手段72が設けられた載置台本体74と、載置台本体上に設けられると共に、その上面に被処理体を載置する熱分散板76と、載置台本体内に設けられた電極78と、載置台本体を支持するために処理容器の底部より起立された筒体状の支柱70と、支柱内に挿通されると共に上端部が加熱手段に接続されたヒータ給電部材110(110A〜110)と、支柱内に挿通されると共に上端部が電極に接続された電極給電部材112とを備えたことを特徴とする載置台構造である。
(もっと読む)
ロードロック装置及び処理システム
【課題】冷却効率を高めてスループットを高く維持でき、複数段の被処理体を面間の温度差が生じないように均一に冷却するロードロック装置を提供する。
【解決手段】真空室6と大気室12との間にゲートバルブを介して連結されると共に真空雰囲気と大気圧雰囲気とを選択的に実現することができるロードロック装置8,10において、ロードロック用容器34と、ロードロック用容器内に設けられて複数枚の被処理体を複数段に亘って支持する支持部52を有する支持手段50と、大気圧復帰用のガスを冷却ガスとして噴射するために支持部に対応させて設けられたガス噴射孔74を有するガス導入手段72と、ロードロック用容器内の雰囲気を真空引きする真空排気系42とを備える。これにより、冷却効率を高めてスループットを高く維持でき、且つ複数段の被処理体を面間の温度差が生じないように均一に冷却する。
(もっと読む)
基板搬送位置制御装置
【課題】可撓性基板の搬送位置制御のために新たな設備を設置することが不要であり、既存の搬送ラインの構成をそのまま維持できるとともに、可撓性基板の搬送位置を所望の方向へ迅速かつ確実に移動させることが可能な基板搬送位置制御装置を提供することにある。
【解決手段】可撓性基板10に張力を付与し、可撓性基板10を長手方向に沿って搬送する曲率半径可変ロール1を備え、曲率半径可変ロール1は、曲率半径を軸方向で部分的に変化させることによって、可撓性基板10が接触した際に生ずる張力に可撓性基板10の幅方向で分布を与え、可撓性基板10の搬送位置を変化させるように構成されている。
(もっと読む)
真空処理装置
【課題】吸着面に付着した不純物に起因して吸着力が低下した静電チャックを、簡単な構成により不純物を除去して吸着力を再生することができ、安定して真空処理を行うことが可能な真空処理装置を提供する。
【解決手段】本発明の真空処理装置1は、真空チャンバ3と、前記真空チャンバの内部に配され、基板Sを静電気によって吸着する静電チャック用の電極、及び該基板を加熱する加熱機構を有する基板保持手段4と、前記基板保持手段の吸着面に対してUV光を照射し、該吸着面に付着した不純物を除去するUV照射手段90と、を少なくとも備えたことを特徴とする。
(もっと読む)
搬送ロボット及び自動教示方法
【課題】 予め定められた一方向にエンドエフェクタを移動させることで教示位置を教示可能な自動教示装置を提供する。
【解決手段】 半導体搬送ロボット1は、ハンド2と、第1及び第2光電センサ14,15と、制御部28とを有する。第1及び第2光電センサ14,15は、ハンド2に設けられ、互いに異なる方向に延びる光軸L4,L5を有する。制御部28は、予め定められた仮教示位置pcに向かってハンド2を移動させて第1及び第2光電センサ14,15により正教示位置prに配置される冶具31に立設されるピン32を夫々検出させ、検出したときのハンド2の位置である第1及び第2検出位置p1,p2に基づいて正教示位置prと仮教示位置pcとのズレ量Δr、Δθを演算して正教示位置prを求める。制御部28は、ピン32を検出させる際、光軸L4.L5が延びる方向と異なる方向にハンド2を移動させる。
(もっと読む)
基板支持装置、支持台及びこれを備えるイオン注入装置
【課題】基板支持装置、支持台及びこれを備えるイオン注入装置を提供する。
【解決手段】イオン注入装置に備えられた基板支持装置200において、基板の外側を支持する複数の外側支持台201,203と、基板の内側を支持する内側支持台202と、を備え、外側支持台201,203と内側支持台202は、フレーム部201a及び該フレーム部201aに積層し形成されて抗静電性を有する物質からなる基板接触部201bを備える。
(もっと読む)
静電チャックおよび静電チャックの製造方法
【課題】本発明の態様は、かかる課題の認識に基づいてなされたものであり、被処理物を載置する側に形成された樹脂層の剥離抑制効果を向上させることができる静電チャックおよび静電チャックの製造方法を提供する。
【解決手段】誘電体基板と、前記誘電体基板の第1の主面に開口する貫通孔の開口部分に形成された第1の面取り加工部と、前記第1の主面に形成され、前記貫通孔が開口する位置に開口部を有する樹脂層と、を備え、前記樹脂層の開口部の周端は、前記第1の面取り加工部に形成されていること、を特徴とする静電チャックが提供される。
(もっと読む)
側部ガス出口を有する基板支持体および方法
プロセスチャンバ用の基板支持体が、基板を受け取るための受取り表面を有する静電チャックと、静電チャックの下にあるガス分散器ベースプレートとを備える。ガス分散器ベースプレートが、複数のガス出口を有する円周側壁を備え、ガス出口が互いに離隔して設けられて、プロセスガスを基板の外周縁の周りから半径方向外方向へプロセスチャンバ内に導入する。  (もっと読む)
(もっと読む)
静電チャックおよび静電チャックの製造方法
【課題】本発明の態様は、かかる課題の認識に基づいてなされたものであり、パーティクル汚染の発生を大幅に抑制することができ、かつ、静電チャックの載置面側に形成された樹脂層の密着力が高い静電チャックおよび静電チャックの製造方法を提供する。
【解決手段】被処理物を載置する側の主面に形成された突起部と、前記突起部の周辺に形成された平面部と、を有する誘電体基板と、前記突起部と、前記平面部と、を覆うように形成された樹脂層と、を備えた静電チャックであって、前記突起部の頂面の表面粗さは、前記平面部の表面粗さより小さいこと、を特徴とする静電チャックが提供される。
(もっと読む)
基板処理システム及び基板処理方法
【課題】基板収容部に収容される処理済の基板の順序を維持しつつ、従来よりも短時間で処理装置と基板収容部との間で基板の受け渡しを行う。
【解決手段】基板処理システム1は、複数の基板に所定の処理をバッチ式に施す処理チャンバ40と、前記処理チャンバに設けられ、複数の基板を同心円上に載置する正転及び逆転自在な基板載置台41と、複数の基板を鉛直方向に多段に収容する基板収容部50、51と、基板収容部50、51と処理チャンバ40との間で基板Wを搬送する基板保持部56、57と、基板収容部50、51を昇降させる昇降機構54、55を有している。未処理基板Wは基板載置台41を一の方向に回転させながら、基板載置台41に載置され、基板Wの処理の完了後は、基板載置台41を他の方向に回転させながら、処理済の基板の搬出と、未処理基板Wの搬入とを行う。
(もっと読む)
ロボット、及びオートゼロイング方法
【課題】作業員の手を介することなく自動的に基準姿勢を原点姿勢に調整することができ、また基準姿勢を原点姿勢に精度よく調整することができるロボットを提供する。
【解決手段】搬送ロボット22は、角変位可能に連結された連結部材27,28,29を備え、調整可能な基準姿勢を基準として各連結部材27,28,29の変位を制御する。基台23にはレーザセンサ38を備える。レーザセンサ38は、予め定められた方向にレーザ光を投光し、且つ原点姿勢と一致する第1の検出姿勢に第1の連結部材27が配置されると、投光したレーザ光がリフレクタ41で反射された反射光を受光するようになっている。制御部はレーザ光がリフレクタで反射しレーザセンサ38で受光するように第1の連結部材27を角変位させる。受光した時の第1の連結部材27の姿勢を原点姿勢とする。連結部材28,29についても、リフレクタ42,43を用いて同様に原点を調整する。
(もっと読む)
基板熱処理装置及び基板の製造方法
【課題】 基板を真空中で均一且つ急速に加熱すること、または、加熱した基板全体を速やかに冷却すること。
【解決手段】 基板熱処理装置は、輻射率の高いカーボン又はカーボン被覆材料で構成した基板ステージを備えた基板ホルダユニットを昇降可能に真空チャンバ内に設け、真空チャンバ内の基板ホルダユニットの上方に、基板ステージと対向する放熱面を備えた加熱ユニットを設け、基板ステージを放熱面に接近させて、基板ステージ上に載置された基板と非接触状態で、放熱面からの輻射熱で基板を加熱できるようにすると共に、基板ホルダユニットに輻射版、金属炭化物、金属窒化物、ニッケル合金のいずれかで構成される反射板を備える。
(もっと読む)
基板搬送処理装置及び方法
【課題】少ない設置面積で、ウェーハを含む基板の搬送及び処理を行う装置及び方法を提供する。
【解決手段】線形搬送チャンバ1232は、線形トラックと、線形トラックに乗っているロボットアーム1243等を含み、基板を線形的に、処理チャンバ1201等の側部に沿って搬送する。又ロードロック1235を介し、処理チャンバ1201等に到達させ、搬送チャンバ1232に沿って基板を制御された雰囲気の中に供給する。よって相応な経費で、且つ改良されたスループットで効率的に製造を行うことができる。
(もっと読む)
静電チャックシステムおよび基板表面に亘って温度プロファイルを半径方向に調整するための方法
基板表面に亘って所望の温度プロファイルを維持するための静電チャックシステムが開示されている。静電チャックシステムは、ペデスタル支持部の表面に亘って実質的に均一な温度プロファイルを画定するペデスタル支持部と、ペデスタル支持部によって支持されている静電チャックとを有する。静電チャックは、クランプ電極および独立に制御される複数の加熱電極を含む。独立に制御される加熱電極は、内部加熱領域を画定する内部加熱電極、および、ギャップ距離によって分離されている周辺部加熱領域を画定する周辺部加熱電極を含む。ペデスタル熱領域、内部加熱領域、周辺部加熱領域の熱特性を変化させる、または、内部加熱電極および周辺部加熱電極間のギャップ距離の大きさを変化させることにより、基板表面に亘る温度プロファイルを調整することが可能である。  (もっと読む)
(もっと読む)
41 - 60 / 188
[ Back to top ]