
Fターム[5J062AA02]の内容
Fターム[5J062AA02]に分類される特許
21 - 40 / 251
受信装置、受信方法、コンピュータプログラム及び携帯端末
【課題】スリープ期間中に擬似的に衛星信号を同期保持することで平均電力及びピーク電力の低下を図ることが可能な受信装置を提供する。
【解決手段】衛星からの信号を受信する受信部と、受信信号の周波数を所定の中間周波数に変換する周波数変換部と、同期捕捉とキャリア周波数の検出とを行う同期捕捉部と、拡散符号の位相及びキャリア周波数を、複数の衛星に対応して独立に設けられた複数のチャンネルのそれぞれに対して衛星毎に割り当てて設定して拡散符号とキャリアとの同期保持を行うとともに、中間周波数信号に含まれるメッセージを復調する同期保持部と、を備え、同期保持部は、拡散符号に同期する拡散コードを生成する拡散コード生成部を含み、測位動作を行わないスリープ期間においては、同期保持部は拡散コード生成部のみを動作させ、同期保持部が参照するカウンタも併せて動作する受信装置が提供される。
(もっと読む)
測位支援装置

【課題】本発明は、衛星航法が適用された測位系の受信装置において、測位に適用される航行衛星の速度または位置の速やかな識別を可能とする測位支援装置に関し、ハードウェアやソフトウェアの構成が大幅に変更されることなく、高い精度による測位の開始を安価に実現できることを目的とする。
【解決手段】新たに測位に適用される航行衛星にかかわる物理量をフィードバック制御の下で求める測位支援装置であって、前記航行衛星から時系列の順に到来した航法データに応じて求められた前記物理量の列が前記フィードバック制御の過渡的な応答を示す式に代入された連立方程式の根として、前記物理量の収束値を推定する推定手段と、前記収束値を前記測位に適用する測位促進手段とを備える。
(もっと読む)
測位支援装置及び測位支援方法
【課題】通信端末に対して高い精度の概位置情報を送信する。
【解決手段】SUPLサーバ20において、通信端末60から送信される測位結果情報を受信し、この測位結果情報に基づいて、概位置情報DB23において、セルIDに対応付けて格納される概位置情報が更新される。このとき、セルの基準位置を示す基地局の概位置情報と、このセルを含む複数のセルを包含する上位エリアの誤差半径とが通信端末60から送信される測位結果情報に基づいて更新されるため、通信端末60が在圏するセルが上位エリアの基準位置と誤算半径とで規定される領域から外れることを防止できる。したがって、上位エリアに係る情報の精度を高めることができ、通信端末60に対してより高い精度の概位置情報を送信することができる。
(もっと読む)
撮影装置、撮影方法およびプログラム
【課題】必要なハードウェア/ソフトウェアリソースを増大させることなく、撮影画像に付加される測位計算のためのデータ量を低減させることができる撮影装置を提供する。
【解決手段】撮影装置20は、被写体を撮像する撮像部23と、ユーザによる撮影操作を受け付ける操作部24と、操作部24が受け付けた撮影操作に応じて、撮像部23による撮像を制御するCPU27と、複数のGPS衛星から発信される信号を受信するGPSアンテナ部1と、撮像部23による撮像タイミングと同時のタイミングで、GPSアンテナ部1で受信した信号からレンジデータを取得する復調部3と、撮像部23により撮像された画像のデータに、復調部3により取得されたレンジデータを付加してRAM29に記憶させるCPU12,27とを備える。
(もっと読む)
測位支援装置及び測位支援方法
【課題】通信端末に対して高い精度の概位置情報を送信する。
【解決手段】SUPLサーバ20の概位置情報DB23では通信端末60における測位演算に使用され通信端末60が在圏するセルC1の位置を示す概位置情報と、セルC1を特定するセルIDとを対応付けて格納し、通信端末60から送信されるセルIDを含む測位情報送信要求に基づいて、概位置情報DB23に格納される概位置情報を取得し、通信部21から通信端末60に対して送信する。その後通信端末60から送信される測位結果情報を受信し、これに基づき制御部22で概位置情報DB23に格納される概位置情報を更新する。また、通信端末60による測位演算が失敗した場合には、通信端末60からの測位結果情報に含まれるエラーコードと衛星数情報とに基づいて、通信端末60に対して送信した概位置情報が不良であるかを判断し、その結果に基づいて当該概位置情報を初期化する。
(もっと読む)
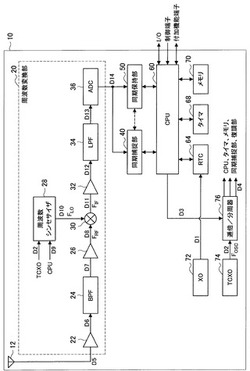
携帯端末
【課題】A−GPSでの携帯端末に比べて構成要素をそれ程増やすことなく、Standaloneでの初回測位と2回目以降測位とを切替え、GPS以外の機能も並行に実行可能な携帯端末を提供する。
【解決手段】携帯端末の制御部20は、StandaloneでのGPSを開始すると、まず、GPS優先モードに入る(ステップS10)。そこでは、Standaloneでの比較的ノイズに弱い初回測位の成功を優先させるために、GPS以外の機能でEMIノイズを発生する機能を数分間停止させるEMI遮断処理(S12)とGPSアンテナダイバーシティ受信処理(S13)を行わせる。初回測位に成功すると、通常モード(S20)に入り、比較的ノイズに強い2回目以降測位に備えて、EMI遮断処理を通常モードに戻し(S21)、GPSアンテナを通常モードに戻し(S22)、GPS以外の機能が並行に実行できる。
(もっと読む)
測位装置、測位方法およびプログラム
【課題】正確に補正された計時時刻によってGPS衛星の送信電波を速やかに捕捉することのできる測位装置、測位方法およびそのプログラムを提供する。
【解決手段】計時を行う計時手段と、受信手段を介して測位衛星から時刻情報を間欠的に受信させる受信制御手段(S1)と、受信された時刻情報に基づき計時手段の計時時刻を修正する時刻修正手段(S14)と、受信された時刻情報と計時手段の計時時刻とに基づいて計時手段の単位時間当たりの誤差(“α/β”)を算出する誤差算出手段(S12,S13)と、算出された単位時間当たりの誤差(“α/β”)に基づき計時手段の計時時刻から誤差を除去した補正時刻を求める時刻補正手段(S4)と、補正時刻を使用して前記測位衛星の信号を捕捉するとともに当該捕捉した信号に基づき位置の測定を行う測位手段(S5〜S8)とを備える。
(もっと読む)
携帯電話端末、携帯電話端末の位置情報通知方法、及び位置情報通知プログラム
【課題】ユーザに手間をかけさせることなく、A−GPS機能に係る消費電力を削減することが可能な携帯電話端末を提供する。
【解決手段】アシストデータを補助的に用いるA−GPS方式により位置情報を算出するGPS部と、オートGPS機能による位置情報の定期取得にあたりアシストデータを生成する位置情報サーバとのセッションを確立して、位置情報サーバからアシストデータを取得すると擬似的な現在位置を示す仮位置情報を位置情報サーバへ通知してセッションを開放する制御部とを備える。
(もっと読む)
測位装置、測位方法およびプログラム
【課題】測位要求に応じて位置データを求める際に、測位衛星を利用した位置の測定が適切に遂行できなかった場合でも、位置データの欠落が生じることのない測位装置、測位方法およびプログラムを提供する。
【解決手段】測位要求がなされた際に、測位衛星を利用した位置の測定を実行させ、この位置の測定が遂行された場合に、この測位結果データを前記測位要求に応じた位置データとして取得する(S43,S44)一方、測位衛星を利用した位置の測定が遂行されなかった場合には、移動方向と移動量とを計測に基づく位置の測定結果データを測位要求に応じた位置データとして取得する(S42,S48)構成とする。
(もっと読む)
無線通信システムにおける非支援のGPS型位置決定を支持する加入者局のシード位置を導出する方法およびシステム
【課題】無線通信システムにおける非支援のGPS型位置決定を支持する加入者局のシード位置を導出する方法およびシステム。
【解決手段】非支援のGPS型位置決定をサポートする際に、無線通信システムにおける加入者局のシード位置を導出する方法およびシステムにおいて、加入者局は、無線通信システムからオーバーヘッドメッセージを受信し、パラメータ値からシード位置を導出する。加入者局は、そのメモリ内のデータ構造を使用し、可能なパラメータ値をシード位置として働き得る対応する位置にマッピングすることができる。データ構造は、更新条件に対応して更新することができる。
(もっと読む)
衛星測位システム
【課題】移動端末が自局の位置を高精度で測位できる衛星測位システムを安価に実現する。
【解決手段】複数個の準天頂衛星201、301a〜301dを用いた衛星測位システムにおいて、複数個の準天頂衛星が一体として衛星軌道に向けて打ち上げられ、複数個の準天頂衛星が一体として衛星軌道に沿って安定に飛行する段階において、比較的に高い仰角に位置する複数個の準天頂衛星の内の1個を基準局201とし、残りの準天頂衛星を中継局301a〜301dとして基準局の周辺の所定の軌道に分散させて、基準局から送信される第1の測位信号と各中継局から送信する第2の測位信号とを同期させることによって、移動端末が自局の位置を高精度で測位できるようにした。
(もっと読む)
GPS受信機の時刻決定方法
【課題】 ホットスタート時におけるTTFFを短くする。
【解決手段】 RTCの時刻から所定の範囲にある時刻を候補時刻とし、この候補時刻における衛星の位置をエフェメリスデータに基づいて算出し、算出した衛星の位置に基づいて、前回の測位位置と衛星との距離を算出する。続いて、算出した距離に基づいて、候補時刻に対する衛星からの送信時刻を算出し、送信時刻における衛星の位置を算出して、算出した衛星の位置と前回の測位位置とに基づいて衛星受信機間距離を算出する。次に、衛星受信機間距離の1ミリ秒以下の桁に対応する部分と、衛星から実際に受信した擬似距離の1ミリ秒以下の部分との差を擬似距離残差とし、各衛星の擬似距離残差を算出して測位させ、その測位位置での擬似距離残差を求め、その標準偏差が小さい候補時刻を割り出す。
(もっと読む)
測位装置、測位方法およびプログラム
【課題】 任意のタイミングで測位処理を実行する場合でも、短時間に位置の測定を完了することのできる測位装置、測位方法およびプログラムを提供する。
【解決手段】 GPS衛星から送られてくる信号を受信する受信手段と、計時を行う計時手段と、受信されたエフェメリス情報を記憶する記憶手段と、受信された時刻情報に基づき計時手段の計時時刻を修正する時刻修正手段と、間欠的なタイミングTE1,TE2,TE3でエフェメリス情報を受信させる第1受信制御手段と、間欠的なタイミングTC1,TC2,TC3,TC4で時刻情報を受信させる第2受信制御手段とを備え、位置測定タイミングT1において計時手段の計時時刻に基づき同期をとりながらGPS衛星の送信信号を捕捉し、この送信信号と前記記憶手段に記憶されているエフェメリス情報とに基づいて位置の測定を行う。
(もっと読む)
電子機器、測位デバイス、情報処理方法およびプログラム
【課題】消費電力を削減するとともに適切な測位を行う。
【解決手段】使用要否判定部330は、ユーザによる操作入力に基づく処理が、測位部360により取得される測位情報を用いる特定処理であるか否かを判定する。この特定処理は、撮像部により生成された画像データに、測位部360により算出される位置情報を関連付けて記録する撮影モードである。動作制御部340は、使用要否判定部330による判定結果と、測位部360における動作内容に基づいて測位部360の動作停止制御を行う。例えば、操作入力に基づく処理が特定処理である場合には、測位部360に電源が供給される。また、操作入力に基づく処理が特定処理でなく測位部360がエフェメリスデータ取得を目的とする動作または衛星捕捉を目的とする動作を行っている場合には、その動作が終了するまでの間、測位部360が動作を継続できるよう制御を行う。
(もっと読む)
関数の局所極大又は極小のパラメータを推定するための手順
【課題】関数の局所極大又は極小のパラメータを推定するための手順。
【解決手段】受信された信号から導出された相関関数の局所極大又は極小のパラメータを推定するための方法及びシステム。内挿された局所極大又は極小が、決定される。内挿オフセットは、その後、導出され、内挿された関数の局所極大又は極小の位置とサンプリングされた関数の局所極大又は極小の位置との間の差を備える。パラメータの推定値は、内挿オフセットから導出される。
(もっと読む)
電子機器
【課題】GPSシステムの拡張情報を適切に利用する電子機器を提供すること。
【解決手段】電子機器1は、衛星201,202からの第1情報または第1情報に代わる第2情報を用いて位置情報を取得する測位手段20と、電源スイッチ18がオフ状態の間に所定間隔で位置情報を取得し得るように測位手段20へ電源供給する電源供給手段17と、第2情報の算出に必要な拡張情報を記憶する第1記憶手段14と、拡張情報が第1記憶手段14に記憶されている場合は電源供給を禁止するように電源供給手段17を制御する制御手段16と、を備える。
(もっと読む)
外部ナビゲーションシステムによる,坑井測量用ジャイロスコープ計器及び慣性計器の方位初期化及び較正
【課題】坑井測量用のジャイロスコープ計器及び/又は慣性計器の方位初期化のためのシステム及び方法を提供すること。
【解決手段】このシステムは,ジャイロスコープ計器及び/又は慣性計器を剛性に接続できる剛基準構造物と,時間に応じた方位測定値を提供する外部ナビゲーションシステムであって,上記剛基準構造物は外部ナビゲーションシステムとジャイロスコープ計器及び/又は慣性計器との間に剛性な方向付けを提供するシステムと,時間に応じた方位測定値とジャイロスコープ計器及び/又は慣性計器の時間に応じた方向とを同期させることができるプロセッサと,を備える。
(もっと読む)
位置判断システムにおいて粗位置注入を限定すること
位置判断システム(PDS)受信機が複数のソースから独立したロケーション情報を収集する。これらの複数のロケーション情報は、ロケーションの整合性を判断するために分析される。ロケーションが様々な独立して収集されたロケーション情報の間で整合する場合、ロケーション情報は、より効率的な捕捉および測位のためにPDS測位プロセスに注入される。そうではなく、不整合が発見された場合、ロケーション情報はPDS測位プロセスに注入されない。 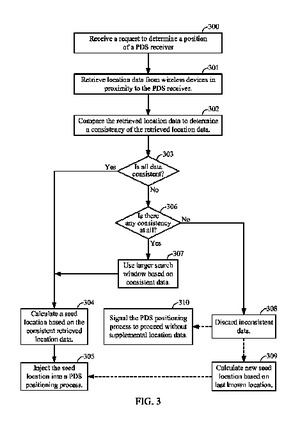 (もっと読む)
(もっと読む)
衛星測位システム測定情報を選択的に確認するための方法および装置
位置推定フィルタ/速度推定フィルタ/時間推定フィルタの中で使用するための疑わしい測定を識別して、位置推定フィルタ/速度推定フィルタ/時間推定フィルタによって後で考慮されるとき、何らかの形で機能するように再重み付け可能であるか、または何らかの形で機能するように片側隔離可能な対応する確認された測定を提供するために、様々な電子デバイス内で実施可能な方法および装置が提供される。 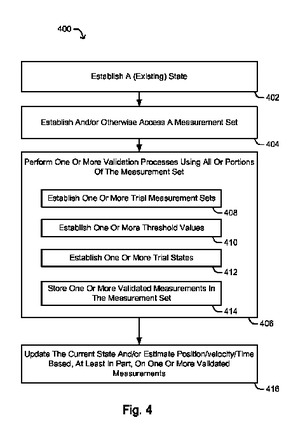 (もっと読む)
(もっと読む)
位置測位装置、位置測位方法および位置測位プログラム
【課題】概略位置の精度に応じて測位計測におけるタイムアウト時間を変化させることによって、現在位置を測位することができないときの測位に必要な待ち時間を短縮することのできる位置測位装置、位置測位方法および位置測位プログラムを提供する。
【解決手段】概略位置誤差判定部22eは概略位置の誤差半径を判定し、タイムアウト時間設定部22gは概略位置誤差判定部22eによって判定された誤差半径に応じて測位計測におけるタイムアウト時間T1〜T3,Tmaxを設定する。位置測位処理タイムアウト指示部22hは、各タイムアウト時間T1〜T3で可視衛星数Sが所定の数に満たない場合またはタイムアウト時間Tmaxに達した場合、位置測位処理部22dで実行されている位置測位処理をタイムアウトさせる。
(もっと読む)
21 - 40 / 251
[ Back to top ]