
Fターム[5J062AA08]の内容
Fターム[5J062AA08]に分類される特許
301 - 320 / 1,174
GPSデータアクセスシステム
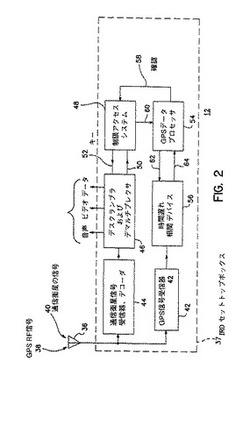
【課題】許可された場所にある場合にのみ、遠隔信号源とのアクセスが許されるIRDセットトップボックスを提供する。
【解決手段】一般にIRDセットトップボックス(IRD)37と呼ばれる一体型の受信機デコーダ37は、衛星航法システム(GPS)受信機44を有する。このGPS受信機44は、IRDが認可された場所にあるかチェックし、その場所が認可されていればビデオ信号のスクランブル解除を許す。GPSデータプロセッサ54は、GPSデータを確認し、制限アクセスシステム48の制御に基づいて顧客にビデオ信号を送出する。制限アクセスシステム48は、顧客アクセス管理システムとして参照され、異なる多様なビデオ信号に異なる地理的な限定を加える。場所特定信号は、IRDが単一の固定位置でスクランブル解除することを要求する。
(もっと読む)
可動機械用の位置監視システム
可動機械(20)および中央制御ステーション(30)を有するシステム(10)を提供する。可動機械は、通信装置(70)と、測位衛星(40)から位置データを受信するとともに位置信号を生成するように構成された受信機(55)を有する位置監視システム(50)とを有する。位置監視システムはまた、センサ(61、62、63)を有し、可動機械のパラメータを測定するとともに移動信号を生成するように構成された、慣性航法装置(60)も有する。位置監視システムはまた、位置信号および移動信号を受信し、位置信号が受信できないことを検出し、位置パラメータを計算し、パラメータの第1値と第2値との差が所定閾値を超えるか否かを確定し、警報信号を生成するように構成された、コントローラ(65)も有する。中央制御ステーションは、コントローラと通信し、位置信号および/または移動信号を受信し、可動機械の位置を監視するように構成されている。  (もっと読む)
(もっと読む)
WI−FI信号による測位のための方法
本発明は、少なくとも1つの無線通信ネットワークの複数のアクセスポイントから受信された信号を使用して端末を測位するための方法に関する。端末は、まず、受信された信号から、アクセスポイントの識別子を取り出し(110)、次いで前記アクセスポイントに関連する地理的位置情報を求めて第1のデータベース(BDP)内を検索する(120)。端末の位置、または端末の測位エリアの第1の推定は、前記アクセスポイントの地理的位置情報から取得され(130)、次いで前記位置または前記測位エリアに関係する地形情報が第2のデータベース(SIG)から取り出される。最後に、端末の位置の第2の推定(150)が、このようにして取得された地形情報を使用して行われる。 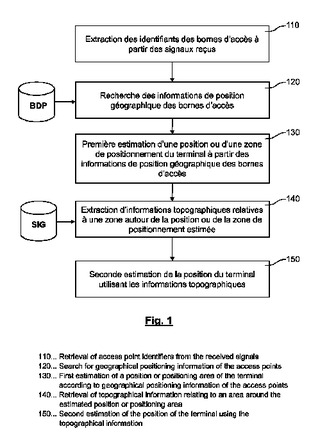 (もっと読む)
(もっと読む)
ワイヤレス通信システムにおける方法および装置
本発明は、OFDMシステムにおける基準信号(RS)測定のためのRBSおよびUEにおける方法および装置に関するものであって、それらによって、システム帯域幅より狭い、構成可能なRS送信帯域幅を有することが可能になるものである。これによって、RSの干渉調整の改善が可能になり、それによって次には、例えば測位のような、多様なサービスについて用いられるUE RS測定が改善される。RBSは、RS送信帯域幅をリトリーブし(710)、このRS送信帯域幅に基づいてRS測定帯域幅を決定し(720)、決定した帯域幅でUEに送信する(730)。UEは、RS測定帯域幅で受信し(810)、受信された測定帯域幅とUEの能力とに基づいて決定した帯域幅でRSを測定する。  (もっと読む)
(もっと読む)
サーバ装置、日時生成装置および日時生成システム

【課題】GPSのWNがロールオーバした場合の日時誤りを自システム単独で解決する。
【解決手段】日時生成部220をGPS受信部221とWNがロールオーバした場合の日時誤りを補正する日時補正部222から構成する。閏秒サーバ100は閏秒とその閏秒の適用時期に対応するWNの組みを蓄え、また基地局装置とネットワークを介して接続している。閏秒サーバ100は、任意のWNと閏秒の組みを与えられると、ロールオーバ回数を求める。日時補正部22は、先ずGPS受信部221からのWNと閏秒を閏秒サーバ100に送信し、対応するロールオーバ回数を受信する。次にこれをもとに正しく補正した日時を生成して基地局装置内に配信する。
(もっと読む)
受信装置
【課題】受信装置の電源投入後短時間で、受信信号の高感度化を図ることができる受信装置を提供することにある。
【解決手段】受信装置は、衛星から信号を受信し、当該信号を処理しやすい周波数に変換する。情報取得手段は、受信した信号に含まれる航法メッセージ情報について予測した情報である予測情報や当該予測情報の信頼度を取得する。相関検出手段は、予測情報と信頼度情報とを用いて、変換信号と、参照用信号との積算結果に基づく相関を検出する。この場合、受信装置は、変換信号中の航法メッセージ情報に関する予測情報を取得しているので、当該予測情報に基づき、航法メッセージの反転箇所を予測することが可能となり、反転箇所を除去しつつ、長期間の積算範囲でも積算を行なうことが可能となる。
(もっと読む)
ネットワーク自律ワイヤレス位置検出システム
ローカル・ワイヤレス通信ネットワークへの相互接続なく、このネットワークの混乱を最小に抑えて、移動体デバイス(例えば、セル・フォン)の正確な位置検出を可能にするように、ネットワーク自律ワイヤレス位置検出システム(NAWLS)が設計されている。分散型無線ネットワーク・ワーク・モニタ(RNM)およびマネージド・ネットワーク・エミュレータ(NE)を用いて、移動体デバイスをサンプリングし、取得し、または捕獲する。一旦RNMまたはNEによってトリガされると、無制限ワイヤレス位置検出システム(U−WLS)を用いて、正確な位置を計算する。U−WLSは、移動体受信機サイトを含み、その各々が、自己位置検出が可能であり、NAWLSの他のコンポーネントと情報を交換し、移動体デバイスからの信号を受信または交換する。U−WLSは、配備された選択肢に応じて、種々のネットワークに基づくおよびハンドセットに基づくワイヤレス位置検出技法を利用する。加えて、NAWLSは、U−WLS、NE、およびRNMを相互接続するデータ・リンクも含む。 (もっと読む)
改善された測位方法
セルラ通信システムにおいて、位置決定用の支援データを提供するための、改善されたクラスタ化を行う方法において、複数のポイントを含む複数のクラスタを提供し(S10)、当該複数のポイントが、高精度基準測定の結果であり、当該複数のクラスタのそれぞれに含まれる当該複数のポイントが、同一かつ固有のフィンガープリント・タグを有し、予め定められた閾値より少ない数のポイントを含む対象クラスタを特定するステップ(S20)。最後に、増加した数の高精度基準測定値を有する統合されたクラスタを提供するために、当該対象クラスタを、提供された複数のクラスタのうちの、少なくとも1つの選択された隣接クラスタと統合する(S30)。 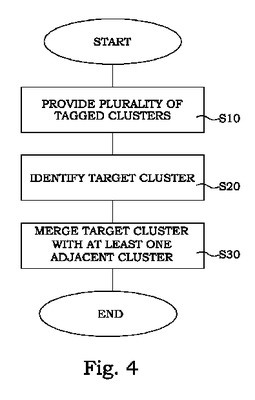 (もっと読む)
(もっと読む)
ワイヤレス・ネットワーク中の端末の測位をサポートするための方法及び装置
ワイヤレス・ネットワーク中の端末の測位をサポートするための技法について説明する。一態様では、異なるエンティティに属することができるロケーション・サーバによって、測位がサポートされ得る。1つの設計では、ロケーション・サーバは、共通の測位プロトコルを介してターゲット・デバイスについての測位情報(例えば、測定値)を取得し得る。ロケーション・サーバは、それがどこに属するかにかかわらず、共通の測位プロトコルを使用し得、このプロトコルを介して他のエンティティと通信し得る。ロケーション・サーバは、測位情報に基づいてターゲット・デバイスについてのロケーション情報(例えば、ロケーション推定値)を判断し得る。別の態様では、複数の測位メッセージを一緒にトランスポートすることによって、測位がサポートされ得る。さらに別の態様では、異なる団体によって規定された複数の部分を含んでいる測位メッセージをトランスポートすることによって、測位がサポートされ得る。さらに別の態様では、異なる測位方法に適用可能であり得る共有測定データ単位及び/又は共有支援データ単位を用いて、測位がサポートされ得る。 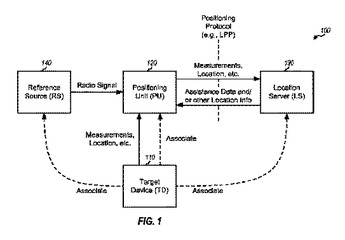 (もっと読む)
(もっと読む)
所有者識別システム
【課題】無線端末の所有者を識別することができる所有者識別システムを提供する。
【解決手段】所有者識別システム100は、複数の人間が居るショッピングモールなどに設置された6台のLRF16a,16bと、AP14を有する中央制御装置10とを含む。中央制御装置10は、或る人間が所有する携帯端末12と、AP14との電波強度rを測定すると共に、LRF16a,16bによって検出される複数の人間の位置(x,y)からAP14までの距離dを算出する。また、中央制御装置10は、事前学習によって作成した分析テーブルから、電波強度rに対応する平均距離Dと標準偏差σを特定する。そして、中央制御装置10は、人間毎に、携帯端末12を所有する確率を求め、最大値かつ所定値以上である人間を携帯端末12の所有者として推定する。
(もっと読む)
位置推定装置及び位置推定方法
【課題】 測位機能を有する移動通信端末の、測位の繰り返しの際の電力消費を低減させる。
【解決手段】 測位サーバ10は、移動通信端末20との間で情報を送受信する送受信部12と、受信された情報に基づいて、移動通信端末20の近傍に位置する別の移動通信端末20を示す近傍端末情報を取得する近傍端末情報取得部13と、近傍端末情報によって示される別の移動通信端末20についての、受信された位置情報に基づいて、位置の推定対象となる移動通信端末20の位置を算出する位置算出部15とを備える。
(もっと読む)
無線ネットワークにおいてピア・ツー・ピア位置決めを提供するための方法および装置
ピア・ツー・ピア位置決め動作を提供し、および/あるいはサポートするために、無線ネットワークで用いる方法および装置が提供される。 (もっと読む)
位置情報取得装置、位置情報取得システム、位置情報取得方法およびプログラム
【課題】サーバから配信されるGPS測位の測位誤差情報を参照し、必要な区間のみセンサと連携したGPS測位を実行する。
【解決手段】複数の位置情報取得装置が、GPS測位系を用いて位置情報を取得し、所定の条件を満たしたときに、GPS測位時の推定位置誤差情報を検出して、取得した位置情報と検出した推定位置誤差情報とをデータサーバに送信する。一方、データサーバは、複数の位置情報取得装置から位置情報と推定位置誤差情報とを受信し、地図情報を所定の単位のブロックに分割し、該受信した情報から各ブロックに対応する推定位置誤差に関する分布データベースを生成して、その生成したデータベースに基づいて、各位置情報取得装置に推定誤差分布情報を送信する。そして、複数の位置情報取得装置は、その推定誤差分布情報を受信し、その受信したGPS測位時の推定誤差分布情報に基づいて、測位方法を選択して、その選択した測位方法により、位置情報を取得する。
(もっと読む)
位置情報決定方法および装置
複数の電子機器を含む通信システムの電子機器で利用される位置情報を決定する方法であって、前記通信システムの複数の通信ネットワークを介して位置要求信号を送信するステップと、前記複数の電子機器の少なくとも1つの電子機器からそれぞれの位置情報を伴う位置応答信号を受信するステップと、受信した前記位置応答信号により前記電子機器の位置情報を決定するステップと、を有しており、前記位置要求信号は、前記電子機器の前記位置情報が前記位置応答信号に基づいて決定されるまで、前記ネットワーク間における特定の順序で前記複数のネットワークに連続的に送信される。 (もっと読む)
移動無線機、基地局、位置情報管理装置
【課題】基地局圏外に所在する移動無線機の位置情報を管理することを目的とする。
【解決手段】複数の移動無線機と基地局13との間で無線通信を行う無線通信システムに用いる移動無線機11であって、GPS衛星14からの電波を受信するGPSアンテナ21と、GPSアンテナ21で受信した信号から自己の位置を測定し位置情報として出力するGPS受信部22と、自身の移動無線機に固有の第1移動無線機IDを位置情報に付加する制御部23と、制御部から位置情報及び第1移動無線機IDを受け、送受信アンテナを介して一定周期で他の移動無線機へ位置情報及び第1移動無線機IDを送信する送受信部24と、を備える。
(もっと読む)
位置情報システム
【課題】
測位用識別情報を送信する測位情報送信装置と、測位用識別情報を位置情報へと変換する測位情報管理サーバからなる位置情報システムにおいて、
システム普及に向けたコストシェアリングの仕組みのため、測位情報送信装置のIDを秘匿・可変化し送信する。
この時、測位情報送信装置の装置IDのビット長が短い場合にも運用可能な方法が望まれる。
【解決手段】
屋内測位システムにおいて、コストシェアリングの仕組みを確立するために、測位情報送信装置は位置情報を直接送信せずに、装置IDを秘匿・可変化した後、送信し、測位情報管理サーバは装置IDと位置情報の関連付けを格納管理し、該関連付けに従い装置IDから位置情報への変換を実行する。さらに測位情報送信装置が測位用識別情報を秘匿化する際に全ての測位情報送信装置が同じ秘密鍵を使用することで秘匿化されたIDの衝突問題を解決し、装置IDのビット長が短い場合にも運用が可能となる。
(もっと読む)
通信装置および通信方法
【課題】電力損失が少ない通信装置および通信方法を提供する。
【解決手段】通信装置は、N個の周波数帯域の無線信号を送受信可能な第1アンテナと、N個の周波数帯域以外の特定周波数帯域の無線信号を送受信可能な第2アンテナと、外部アンテナ端子と、N個の周波数帯域に個別に対応し、自己に対応する周波数帯域の信号の送受信を制御するN個の送受信部と、特定周波数帯域の信号の送受信を制御する特定送受信部と、一端が第1アンテナに接続された第1スイッチと、一端が第2アンテナに接続され他端が特定送受信部に接続された第2スイッチと、一端が外部アンテナ端子に接続された第3スイッチと、一端が特定送受信部と第2スイッチの他端に接続された第4スイッチと、自己に対応する送受信部に接続されたN個の送受信用スイッチとを含み、第1、第3および第4スイッチの他端と送受信用スイッチの他端とが互いに接続されている。
(もっと読む)
バッテリの寿命を改善する方法
明細書および図面は装置、システム、および受信機の線形性に影響する1つ以上のパラメータを識別し、1つ以上のモードに1つ以上のパラメータを割り当て、1つ以上のパラメータに基づいて受信機の線形性を調節することを含むバッテリ寿命を伸ばし、かつ改善する方法について記載し、示す。 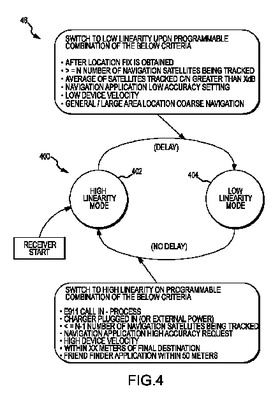 (もっと読む)
(もっと読む)
画像撮影システム、画像撮影装置およびその方法
【課題】撮影位置を適応的に可能な限り正確に検出して、撮影位置情報を画像情報に付加する。
【解決手段】本願開示の画像撮影装置は、撮影装置が使用可能な複数の位置検出用センサ(GPS176、方向センサ178,加速度センサ180および速度センサ182など)の内、画像撮影が行われている環境等に対応して、例えば、GPS信号が受信可能な位置においては、GPS176により位置情報を検出し、GPS信号が受信不可能な位置においては、その他のセンサにより位置情報を検出すると言ったように、使用されうる位置検出用センサの内、最適ないずれかが選択されるように構成されている。このように最適なセンサにより検出された位置情報は、カメラ150により撮影された画像に、指定された態様で付加され、表示あるいは記憶される。
(もっと読む)
フィンガープリント法を用いた位置検出システム及び位置検出方法
フィンガープリンティング法による位置検出システム及び方法であって:複数のフィールドデバイスと一つのターゲットデバイスとに関連する領域の中の複数のノードを定義する段階と;前記複数のノードにおける前記フィールドデバイスからの予測信号強度を決定する段階であって、特定のノードにおけるそれぞれの予測信号強度は、前記フィールドデバイスの一つと関連する、段階と;前記ターゲットデバイスと通信する前記フィールドデバイスのそれぞれのための、前記ターゲットデバイスにおける前記フィールドデバイスからの実信号強度を測定する段階であって、それぞれの実信号強度は前記フィールドデバイスの一つと関連する、段階と;特定のフィールドデバイスの実信号強度より大きいか又は等しい、特定のフィールドデバイスの予測信号強度を有する前記ノードを有効なノードとして指定する段階と;前記有効なノードのうち、前記フィールドデバイスの実信号強度が、前記フィールドデバイスの予測信号強度と一致する、少なくとも一つの有効なノードを決定する段階と;を有する。  (もっと読む)
(もっと読む)
301 - 320 / 1,174
[ Back to top ]