
Fターム[5J062AA09]の内容
Fターム[5J062AA09]に分類される特許
41 - 60 / 675
位置推定サーバ、位置推定方法および位置推定プログラム
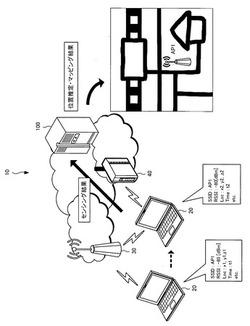
【課題】特別なデバイスを搭載しない端末から収集した精度にばらつきのある情報を用いて、アクセスポイントの位置を簡素かつ高精度に推定できる位置推定サーバ、位置推定方法および位置推定プログラムを提供する。
【解決手段】無線LANのアクセスポイント30の位置を推定する位置推定サーバ100であって、端末20の位置および伝搬路の情報を含み、特定のアクセスポイント30に対応付けて端末20により報告された報告データを保持するデータベースと、データベースを参照し、報告データのうち、端末位置の精度が高く、伝搬路変動の小さいデータを重視して、特定のアクセスポイント30を推定する位置推定部と、を備える。これにより、特別なデバイスを搭載しない端末20による精度にばらつきのある位置情報を用いて、アクセスポイント30の位置を簡素かつ高精度に推定できる。
(もっと読む)
位置推定装置、位置推定方法及び位置推定プログラム

【課題】 電波強度地図上の電波強度の信頼度を考慮することで、誤った位置推定が行われてしまうことを抑制する。
【解決手段】 位置推定装置は、電波送信源からの電波を受信する電波受信部12と、設定領域内で実施された電波強度の計測結果に基づいて作成され、設定領域内の各位置における電波強度の推定値を記憶する電波強度地図22と、設定領域内で実施された電波強度の計測結果に基づいて作成され、設定領域内の各位置における電波強度の推定値のバラツキを記憶する分散地図24と、電波受信部で受信した電波強度と、電波強度地図と、分散地図を用いて、電波受信部の位置を推定する位置推定部20を有する。
(もっと読む)
自動車を発見しかつ追跡するためのデバイス
【課題】衛星ナビゲーションに基づいた乗り物の発見・追跡デバイスを改善すること。
【解決手段】本発明は乗り物の発見及び追跡のためのデバイスに関し、前記デバイスは、
現在の乗り物の位置を決定するための位置決定デバイス(12)と、
通信チャネル(18)を介して現在の乗り物の位置を受信器(16)へ送信するための送信デバイス(14)と、
動作中の妨害送信器を発見するため及び妨害送信器(30)の発見が特定のアクションをトリガするための手段(20、26、28)と、を有する。
(もっと読む)
測位装置及び測位方法
【課題】受信状況が劣化している受信アンテナが存在している状況下でも、高精度に電波送信源の位置を測位することができるようにする。
【解決手段】STFT部5−1〜5−Nにより算出された各周波数の信号強度の統計平均及び標準偏差を求め、ある受信アンテナ2により受信された電波の振幅値に係る高周波の信号強度が統計平均より大きく、かつ、標準偏差から所定以上乖離していれば、受信アンテナ2の受信状況が劣化していると判断する統計処理部6を設け、N個の到来時刻の中から、統計処理部6により受信状況の劣化が検出された受信アンテナ2が受信している電波の到来時刻を除外する。
(もっと読む)
移動デバイスの位置推定
【課題】複数の無線アクセス・ゲートウェイを使用した位置推定の方法、プログラム及びシステムを提供する。
【解決手段】移動デバイス100は、複数の無線アクセス・ゲートウェイを走査及び検出できる。移動デバイスは、移動デバイスと各無線アクセス・ゲートウェイとの間の距離の初期推定値を判定できる。移動デバイスは、サーバ108から検出された無線アクセス・ゲートウェイの位置データ109を受信できる。位置データは、各無線アクセス・ゲートウェイの推定位置、推定位置の不確定性及び各無線アクセス・ゲートウェイの到達範囲を含み得る。移動デバイスは、不確定性、到達範囲及び初期推定値を使用して各推定位置の重みを割り当てることができる。移動デバイスは、重み付けした位置を使用して移動デバイスの位置を推定できる。
(もっと読む)
測位方法、測位システム及びプログラム
【課題】測位方法、測位システム及びプログラムにおいて、RSSIを利用して高精度の測位を実現することを目的とする。
【解決手段】携帯端末の位置を測位する測位方法において、携帯端末で複数のアンカーから受ける現在の無線信号強度を取得し、予め求められている複数のアンカーから携帯端末までの距離と無線信号強度の関係から携帯端末の各アンカーからの距離の範囲を決定し、決定された各アンカーからの距離の範囲により、携帯端末の位置の範囲を三点測位を行う方法で第1の範囲に絞り込み、2つのアンカーの全ての組み合わせについて各組み合わせを形成する2つのアンカーから携帯端末までの距離の差の範囲から、外乱パラメータに応じた携帯端末の位置の範囲を求め、求めた携帯端末の位置の範囲を当該位置の範囲と第1の範囲との積領域で形成された第2の範囲まで絞り込むように構成する。
(もっと読む)
地表に位置する無線信号送信機の地理的位置測定のシステム、及び関連する分散干渉法
【課題】地表に位置する無線信号送信機の地理的位置測定のシステム、及び関連する分散干渉法を提供する。
【解決手段】拡張された干渉法装置を形成する、受信アンテナ(ANT1、ANT2、ANT3)を装備する人工衛星(SAT1、SAT2、SAT3)と、各衛星用の少なくとも1つの専用センサー(CAPTd_1、CAPTd_2、CAPTd_3)、及び衛星間通信手段(COMM1、COMM2、COMM3)を含む、衛星間相対計測装置と、衛星間相対計測装置により配信される、衛星の互いの相対位置の決定から来る、受信信号の日付決定用装置(DAT1、DAT2、DAT3)と、衛星のアンテナの、少なくとも1組を含む第二の干渉法装置と、地上基地局(SBS)と、衛星上で取得した測定値を地上基地局に送信するための装置と、衛星のうちの少なくとも1つの絶対位置を決定する手段(DPA)とを含むシステム。
(もっと読む)
測位装置および測位方法
【課題】複数の測位方式の中から、要求される測定精度を満たし、かつ消費電力の小さい測位方式を、測位環境に応じて適応的に選択すること。
【解決手段】測位装置は、複数の測位手段と、複数の測位手段に測位を実行させる測位制御部と、複数の測位手段による測位が実行される際に消費される電力を測定する消費電力測定部と、複数の測位手段により測位が実行される際に取得されるべき測位精度と、消費電力に基づいて、測位に使用すべき測位手段を設定する測位手段設定部とを有する。
(もっと読む)
同期時間バイアスを使用する測位システムにおける位置計算
【課題】衛星ナビゲーションシステムと無線通信システムとから受信した信号に基づいて移動体の位置決めの解を計算する技術に関する。
【解決手段】衛星ナビゲーションシステム5のシステム時間と無線通信システム8のシステム時間とを相互に制約する同期バイアスを見越して、解く。移動体4は、環境における位置の解を計算するのに、定められた制約を使用するか、さもなければ、追加の独立の測定値を必要とする。移動体は、受信機自立保全監視(Receiver Autonomous Integrity Monitoring, RAIM)機能を取入れて、各受信信号から求めた位置および時間の解を確認してもよい。ここに記載されている技術にしたがって、移動体は、定められた同期バイアスを利用して、環境にRAIMまたは同様の技術、さもなければ、不定の技術を適用する。
(もっと読む)
測位装置及び測位方法
【課題】複数の測位部を有する移動端末において、アプリケーションが必要とする要求精度を満たす一方消費電力が少ない測位部を効率的に発見できるようにすること。
【解決手段】測位装置は、現在地の測位結果を出力する複数の測位部と、複数の測位部各々について有意の測位結果が得られる確率とその測位結果に対する誤差の情報とを記憶する記憶部と、記憶部に記憶されている確率及び誤差の情報を用いて、複数の測位部各々による測位結果がアプリケーションの要求精度を満たす確率を算出し、その確率及び予想される消費電力に基づいて、複数の測位部のうちの1つ以上を使用する順序を決定する制御部とを有し、複数の測位部のうちの1つ以上が順序にしたがって測位結果を出力する。
(もっと読む)
携帯端末、位置検出方法、プログラム
【課題】携帯端末の周囲の金属物の有無を考慮して位置検出動作を行う。
【解決手段】携帯端末は、地磁気を検出する地磁気検出部12と、位置を検出する位置検出部11と、前記地磁気検出部12の検出状態を判定する判定部13と、前記判定部13の判定結果に基づいて、前記位置検出部11の位置検出動作を切り替える制御部14と、を有する。前記制御部14は、前記地磁気検出部12の検出状態が有効または無効のいずれであるかに基づいて、該位置検出動作を開始してから停止するまでの時間であるタイムアウト時間を切り替える。
(もっと読む)
方位・仰角測定システム
【課題】到来信号の方位および仰角を精密に測定できる方位・仰角測定システムを提供する。
【解決手段】複数のアンテナ111〜11pと、複数のアンテナから得られる複数のアンテナ受信信号に基づき推定した到来波数と到来信号を用いてレイトレーシングによる電波伝搬経路推定を行って到来方向を求め、該求めた到来方向を初期値として到来方位および仰角を測定する信号処理装置15を備えている。
(もっと読む)
周波数推定方法、広帯域周波数弁別器及び無線位置測定用受信機
【課題】 サンプリング周波数の2倍の周波数における回転因子の集合に対応する、DFT演算子と1/2DFT演算子の組み合わせにもとづく周波数弁別器である。
【解決手段】 周波数弁別器は、ゼロ又は不連続点を持たないように選定される。そのため、この発明の弁別器は、拡張された動作範囲において、より安定的かつ良好に動作する。この発明の弁別器は、GPS受信機に適用された場合、初めに大きな誤差が有っても、より確実にキャリヤ周波数にロックすることが可能であるとともに、誤ってロックする問題を防止するものである。
(もっと読む)
モバイルロケータ
【課題】本発明は、自律航法において、モバイルロケータが経時変化した後にも、車両位置の計測結果についての補正データを修正するとともに、GPS測位において、車両位置の計測結果の誤差を小さくすることを目的とする。
【解決手段】本発明は、自律航法及び補正データを利用して算出した2地点間の移動距離を、その2地点の絶対位置に基づくその2地点間の移動距離と比較し、これらの移動距離の相違に応じて、補正データを修正する。そして、GPS測位を利用して算出したある地点の位置を、その地点の絶対位置に基づいて補正する。
(もっと読む)
位置測位システム
【課題】 2つ以上のGPSセンサを用いて、位置測位精度を向上することができる位置測位システムを提供することを目的とする。
【解決手段】GPS衛星からのGPS衛星信号を受信する複数のアンテナと、複数のアンテナのうち対応するアンテナからのGPS衛星信号を受信し、位置情報及びDOP値を出力する複数のGPS衛星信号処理部と、複数のGPS衛星信号処理部のうち、最も小さいDOP値を出力するGPS衛星信号処理部から出力された位置情報を出力する位置情報出力部と、を備えたことを特徴とする位置測位システムである。
(もっと読む)
位置算出方法及び位置算出装置
【課題】位置算出の正確性を向上させる、位置算出方法及び位置算出装置を提供する。
【解決手段】測位用信号の一種であるGPS衛星信号を受信する。そして、少なくともGPS受信機の位置の変動を確率変数とする確率分布モデルである状態変動正規分布モデルに基づいて定められた位置算出演算を行って、GPS受信機の位置を算出する。
(もっと読む)
位置情報補正システム
【課題】GPSで測位した位置情報を補正することができるようにした位置情報補正システムを提供する。
【解決手段】携帯電話機1の位置情報ログ取得部11は、GPS受信機を用いて位置情報をログとして取得する。送信部12は、位置情報ログ取得部11から取得した位置情報ログを、ネットワーク5を介してサーバー4に送信する。サーバー4の受信部41は、ネットワーク5を介して携帯電話機1から送信されてきた位置情報ログを受信し、記憶部42に記憶させる。位置情報精度判定部44は、記憶部42に記憶されている位置情報ログを読み出し、位置情報の精度を判定し、判定結果を位置情報補正部45に供給する。位置情報補正部45は、位置情報精度判定部44からの位置情報精度の判定結果から、位置情報ログの取得時刻の前後2つの位置情報ログに基づいて、位置情報ログを補正する。
(もっと読む)
端末位置判定装置および端末位置判定システム
【課題】車車間通信や歩車間通信によって端末間でやり取りされるGPS位置情報のような衛星を用いた位置情報の信頼度を判定する構成を提供する。
【解決手段】車車間通信部32が受信した他の端末のGPS位置情報と取得部33が取得した他の端末の移動速度および走行方向に基づき、推定部34によりGPS位置情報に基づく他の端末の存在位置を基準にして、つぎの時刻の他の端末の存在位置を推定し、判定部35により、推定部34が推定した他の端末のつぎの時刻の推定位置と、車車間通信部32がつぎの時刻に受信したGPS位置情報に基づく他の端末の存在位置との一致度に基づいて、他の端末から受信するGPS位置情報の信頼度を判定する。
(もっと読む)
測位装置、測位システム、測位方法、プログラム
【課題】周囲環境の影響によるセンサの信頼度低下に対して高い精度で測位が行えるようにする。
【解決手段】それぞれ検知対象が異なる複数のセンサから出力されるセンサ値の信頼度を環境データベースを利用して求める。また、信頼度が付加されたセンサ値を利用して複数の測位手法により並行して測位を行って複数の測位結果を得る。また、これらの測位結果の信頼度を環境データベースを利用して求める。そして、これらの信頼度が付加された測位結果を統合して1つの位置情報を出力するように構成する。
(もっと読む)
航法計算システム
【課題】外部からの助けなしに、独自に、GPS観測値の異常を異常発生後速やかに検出することができる。
【解決手段】検定1処理部8にて、IMU6の出力に基づき計算される姿勢角と、GPSの搬送波観測値に基づいてGPSコンパス計算部5で計算される姿勢角を比較して、ほぼ一致する場合には、GPSの搬送波位相観測値が正常であると判断し、さらに、検定2処理部9にて、検定1処理部8で正常と判断された搬送波位相観測値の変化量と、擬似距離観測値の変化量を比較して、ほぼ一致する場合に、擬似距離観測値も正常であると判定する。これらの判定で正常であると判定されたGPS観測値だけを航法計算装置7で使うようにすることで、異常なGPS観測値が航法計算に用いられることを防止することができる。
(もっと読む)
41 - 60 / 675
[ Back to top ]