
Fターム[5J062AA09]の内容
Fターム[5J062AA09]に分類される特許
121 - 140 / 675
構内無線システム
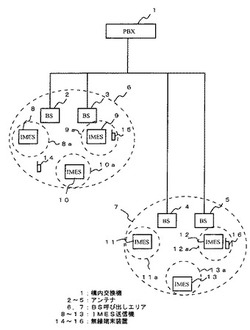
【課題】IMES送信機を利用して各無線端末装置の位置登録を行うことにより、エリアカバー率および位置検出精度の向上を可能にした構内無線システムを提供する。
【解決手段】BS呼び出しエリア6,7内にIMES送信機8〜13を設け、少なくとも一台の無線端末装置の定期位置登録機能は、IMES送信機8〜13からIMES取得情報を取得したときにはIMES取得情報を付加した定期位置登録データを構内交換機1に送信するように構成し、また構内交換機1の定期位置登録機能は、各無線端末装置14〜16から受信した定期位置登録データにIMES取得情報が含まれているときの位置情報と、各無線端末装置14〜16から受信した定期位置登録データにIMES取得情報が含まれていないときのBS呼び出しエリア情報のみの位置情報とのいずれかを用いて位置管理を行う。
(もっと読む)
測位装置、測位方法、プログラム及び撮像装置

【課題】測位手段による測位の不安定な状態における位置情報の精度の向上を図る。
【解決手段】CPU10は、撮影位置において自律航法測位による継続的計測及びGPS測位による所定タイミング毎の測定を開始する。そして、CPU10は、GPS測位によって得られた少なくとも2以上の位置データに基づいて算出される移動ベクトルと、自律航法測位によりGPS測位によって得られた位置データとそれぞれ同時期に得られた2以上の地点における移動ベクトルとの差が所定範囲以内である場合に、少なくとも2以上の位置データのうちの何れかに基づいて位置情報取得地点を定める。そして、CPU10は、位置情報取得地点における位置データと自律航法測位により継続的に計測されてきた位置データとに基づいて撮影位置の位置データを求める。
(もっと読む)
位置推定装置、位置推定方法およびプログラム
【課題】位置推定装置、位置推定方法およびプログラムを提供する。
【解決手段】基地局の位置情報を記憶している基地局情報記憶部と、前記基地局情報記憶部に記憶されている位置情報が制限範囲内である基地局の位置情報、および当該基地局から送信された無線信号の信号強度の測定情報に基づき、前記無線信号の測定位置を推定する位置推定部と、を備える位置推定装置。
(もっと読む)
信頼度の高いGPS測位信号のみを用いた衛星航法補強システム
【課題】 GPS衛星からの信号の信頼性を適正に判断できるようにする。
【解決手段】 衛星航法補強システム2にGPS衛星4からの信号に基づき擬似距離が測定された際の搬送波電力対雑音電力密度比(C/No)の値が適正であるか否かを判定するためのモニタ閾値を算出する閾値算出部32と、C/No値とモニタ閾値とを比較して、擬似距離が適正な精度を持つか否かを判定する擬似距離判定部33と、を設ける。
(もっと読む)
測位装置
【課題】比較的大きな受信機時計ドリフトが発生した場合でも高精度でリアルタイムに現在位置を測位することができる測位装置を提供する。
【解決手段】測位装置20は、受信信号を解析する受信信号解析部21と、受信時刻情報を受信信号解析部21に提供する受信機時計22と、利用者位置、利用者速度及び受信機時刻を推定するカルマンフィルタ40と、を備え、カルマンフィルタ40は、状態予測を行う状態予測処理手段41と、状態推定を行う状態推定処理部42と、受信機時計22の異常変化を検出する時計異常変化検出部43と、を備え、状態予測処理手段41は、状態推定処理部42から得る1エポック前の状態変数ベクトルに基づいて現エポックの状態変数ベクトルを予測する状態予測処理部41aと、時計異常変化検出部43の検出結果に基づいて状態予測値を修正する状態予測値修正部41bと、を備える。
(もっと読む)
位置測定装置、および位置測定方法
【課題】移動体の絶対位置を簡単に精度高く取得できなかった。
【解決手段】移動体の最新の位置情報を格納しており、移動速度と移動方向を含む移動情報を取得する移動情報取得部と、位置情報と移動情報とを用いて移動体の予測位置情報を取得する予測位置情報取得部と、2以上の衛星からGPS信号を受信するGPS信号受信部と、2以上の衛星ごとにGPS信号を用いて、移動体と各衛星との擬似距離を取得する擬似距離取得部と、2以上の各衛星の擬似距離を用いて新位置情報を算出する新位置情報算出部と、新位置情報と予測位置情報との距離を算出する距離算出部と、距離が第一閾値を超えないか否かを判断する判断部と、第一閾値を超えない場合に新位置情報を最新の位置情報として書き込む位置情報更新部と、各部の処理を繰り返えさせる制御部とを具備する位置測定装置により、絶対位置を簡易な構成で精度高く取得できる。
(もっと読む)
局所的航法衛星システム又は全地球的航法衛星システムにおけるロバストで改善された空間信号の正確性パラメータの演算
【課題】古典的なアプローチより良好に同時に実行するロバスト検知において、空間信号の正確性パラメータの演算を提供する。
【解決手段】個々の空間信号の誤差ベクトルを測定するステップ(S10)と、個々の空間信号の誤差ベクトルをサービスエリアにマッピングするステップ(S12)と、経験的なサンプルセットを集積するステップ(S14)と、集積されたサンプルセットの推定の密度関数を処理するステップ(S16)と、ガリレオのオーバーバウンド検知において、又は、過剰質量を有する対のオーバーバウンドの検知において、密度関数を個々にオーバーバウンドするステップ(S18)と、既定された要件による最も悪い場合を選択するステップ(S20)と、の少なくとも1つを備える。
(もっと読む)
機器配置検出システム、機器配置検出方法および機器
【課題】新たな機器の位置を測定することで、測定可能エリアを拡張したり、測定精度を向上させたりすることのできる機器配置検出システムを提供する。
【解決手段】位置情報が既知の管理MFP1、2、3と新規管理MFP4との間で無線通信を行ったときの無線強度から、管理MFP1、2,3と新規管理MFP4との距離を測定し、これらの距離と管理MFP1、2、3の既知の位置情報とから、新規管理MFP4の位置情報を導出する。こうして導出した新規管理MFP4を、他の機器の位置を測定する際に、位置情報が既知の管理MFPの1つに加える。これにより、位置検出可能な範囲は、管理MFP1、2、3のとき図中のE1であったものが、新規管理MFP4を加えることでE1+E2に拡張される。
(もっと読む)
GPS衛星位置算出方法及び装置
【課題】疑似距離の計算方法を簡素化しつつ計算精度の向上を図り、結果的にGPS衛星の位置検出精度の改善が可能な技術を提供する
【解決手段】GPS衛星位置算出装置10は、GPS衛星から発せられる信号に含まれる軌道速度vと時刻tbとから、基準点の位置Oが信号を受信した時刻trでのGPS衛星の位置Bを算出し、このGPS衛星の位置Bと基準点の位置Oとを結ぶ線分に対する地平線の角度αを算出し(S106)、算出した基準点の位置OからGPS衛星の位置Bまでの距離ctと、取得した高度hと、算出した角度αとに基づき、基準点の位置Oから信号を発信した時刻におけるGPS衛星の位置Aまでの距離csを疑似距離として算出し(S107)、これを用いてGPS衛星の位置Aを算出する(S108)。
(もっと読む)
姿勢角安定化装置及び方法
【課題】高精度速度計測装置に組み込まれて、移動体の静止時における位置、速度及び方位の変化を解消すると共に、静止状態から動的状態に切り替わるときであっても、連続的な姿勢角及び速度応答出力を行うことができるようにする姿勢角安定化装置及び方法を提供すること。
【解決手段】姿勢角安定化装置100は、移動体の角速度とフィードバックした補正値とから姿勢角の変化量を算出し、算出した姿勢角の変化量を積分した姿勢角と、カルマンフィルタによって推定された姿勢角の推定値とから姿勢行列を生成し出力する。そして、動作時と判定した場合に生成した姿勢行列のラッチを行い、静止時と判定した場合に静止時であると判定する前の姿勢行列のラッチを保持し、ラッチしている姿勢行列と、生成した姿勢行列とから姿勢角誤差を算出し、算出した姿勢角誤差と生成した姿勢行列とに基づいて姿勢角を補正するための補正制御値を算出し、フィードバックする。
(もっと読む)
局地的地形に関する知識を利用した位置決定システムにおける完全性監視
【課題】複数のパラメータ測定値から受信機の位置推定値を導出するシステムと方法を提供する。
【解決手段】相関関数から各測定値を導出する。相関関数は受信機で受信した信号と、受信機が受信できる送信機を一意的に識別する識別符号との相関を取ることによって順次導かれる。複数の測定値の異なる部分集合から、複数の位置推定値の各々が導かれる。局地的地形に基づいて、位置推定値の1つが受信機の位置の最良推定値として選定される。
(もっと読む)
移動体高精度速度計測装置及び方法
【課題】GPS受信機から得られるドップラー速度情報の良否を判定し、高精度及び高信頼の速度をリアルタイムに出力する装置及び方法を提供すること。
【解決手段】移動体高精度速度計測装置10は、移動体の加速度及び角速度からストラップダウン演算により速度を算出し、GPS搬送波のドップラーシフト量から移動体のドップラー速度を測定し、ドップラー速度から良否係数を算出する。次に、遅延させたドップラー速度と、フィードバックさせたリアルタイム補間速度との同期化を行い、同期化されたドップラー速度とリアルタイム補間速度との誤差量を算出し、算出した誤差量に良否係数を乗算し、良否係数を乗算した誤差量からリアルタイム補間速度に対する調整量を、カルマンフィルタによって推定演算する。そして、ストラップダウン演算により算出した速度に、カルマンフィルタによって推定演算された調整量を融合してリアルタイム補間速度を算出し、出力する。
(もっと読む)
衛星位置決めシステムにおいて高度情報を使用するための方法とシステム
【課題】移動衛星位置決めシステム(SPS)受信機の位置を決定するための方法および装置を提供する。
【解決手段】方法は、セルオブジェクト情報が決定され、このセルオブジェクト情報は、セルオブジェクトロケーションあるいはセルオブジェクト識別のうちの少なくとも1つを具備する。高度は、移動SPS受信機に連結された(及び典型的には、一体となっている)セルベースの通信システムと、無線通信中のセルサイト送信機に基づいて選ばれたセルオブジェクト情報から決定される。この移動SPS受信機の位置は、セルオブジェクト情報から決定される高度を使用して計算される。
(もっと読む)
無線通信システムにおいて、デバイスの位置決めに用いられるナビゲーション解を選択すること
【課題】移動局ユニットの位置決めの精度を改善する。
【解決手段】無線通信システムでは、移動局ユニットの位置決めのために異なる種類の位置決め解が使用されうる。この位置決め解は、地上ベースすなわちネットワークベースの技術と、例えば衛星のような非ネットワークベースの技術を含む。移動局ユニットの位置決めを行う際に、異なる位置決め解による装置及び方法が、異なる解の良度示数に基づいて選択される。
(もっと読む)
位置検知システムおよび方法
【課題】ハードウェアを増加させることなく、マルチパスの影響を抑制して高い検知精度を得る。
【解決手段】演算装置30に、受信端末20で得られた受信電界強度を順次記憶する記憶部34と、この記憶部34に記憶されている受信電界強度に基づいて送信端末10の端末位置を計算する位置計算部35とを設け、位置計算部35で、記憶部34で記憶している受信電界強度のうち、端末位置計算の対象となる対象期間内に得られた受信電界強度の最大受信電界強度を当該受信端末20ごとに選択し、これら最大受信電界強度から端末位置を計算する。
(もっと読む)
無線端末装置及び制御方法
【課題】GPS測位における利用者の利便性を損なうことなく、より省電力を実現できる無線端末装置及び制御方法を提供すること。
【解決手段】携帯電話機1は、衛星の方向を示す補助情報に基づいて当該衛星を捕捉し、当該捕捉した衛星から得られた信号に基づいて、GPS測位処理を実行する測位処理部34と、捕捉した衛星から得られる信号の受信強度を取得する強度取得部31と、捕捉した衛星の仰角及び方位角を取得する方向取得部32と、強度取得部31により取得された受信強度、及び方向取得部32により取得された方向に基づいて、GPS測位処理の測位精度を判定し、当該GPS測位処理の実行頻度を設定する頻度設定部33と、を備える。
(もっと読む)
測位支援装置
【課題】本発明は、衛星航法に基づく測位系において、航行衛星の位置、速度、加速度の何れかに生じる欠落を補完する測位支援装置に関し、地形や地物の分布に柔軟に適応し、かつ精度よく安定にリアルタイムによる測位を可能とすることを目的とする。
【解決手段】軌道データで時系列tの順に定まる航行衛星の速度Vt を蓄積するログ手段と、前記航行衛星の速度vt0と、前記速度vt0に対する誤差が所定の範囲内にある速度vt1〜vtnとを得る候補取得手段と、前記速度vt0、vt1〜vtnの内、前記時系列tの順に前記航行衛星に作用する外力Ftと前記航行衛星の質量mとの比の前記時系列tの逆順における積分の結果との和の前記ログ手段に先行して蓄積された所定の数Nの速度Vtに対する偏差が規定の範囲内にあり、あるいは最小である特定の速度で前記航行衛星の速度を補完する補完手段とを備える。
(もっと読む)
累積誤差を占めるパラメータ推定値のための信頼性指標
【課題】相関分析を用いて、信号から導出されるパラメータ推定値のための信頼性指標を生成する方法を提供する。
【解決手段】非視線信号条件が存在するか、又は存在しそうであるかを示すインジケーションを取得すること、及び/又は複数経路信号条件が存在するか、又は存在しそうであるかを示すインジケーションを取得することによって開始する。これらインジケーションに応じて、パラメータ推定値について信頼性指標を導出する。このパラメータ推定値は信号の到着時間推定値であり、信頼性指標は到着時間推定値の自乗平均平方根誤差である。そしてピークにおける相関関数の強度の測定値に基づいて、非視線信号条件が存在するか、あるいは存在しそうであるかを示すインジケーションを取得する。ピークにおける相関関数の強度測定値は、合計受信出力で除されたチップ毎のエネルギー(EC/I0)であるか、又はピークにおける相関関数のエネルギーである。
(もっと読む)
測位支援装置
【課題】本発明は、衛星航法に基づく測位系において、航行衛星から通知され、その航行衛星に搭載された時計が示す時刻の有効期間を延長する測位支援装置に関し、精度よく安定に航行衛星から正常に受信された衛星時刻の有効期間を大幅に延長することができることを目的とする。
【解決手段】時系列iの順に、航行衛星によって航法データが送信された時刻ti以降における前記航行衛星上の時刻Tiを個別に与え、かつ前記航法データで与えられる予測関数Fpiを蓄積するログ手段と、前記時系列iにおける値が前記時刻Tiの近似値もしくは前記時刻Tiであり、かつ前記時系列iの逆順に先行する所定の数Nの時点において、前記予測関数Fpiに対する偏差が既定の範囲に抑えられ、あるいは最小である予測関数Fpi′で前記予測関数Fpiを補完する補完手段とを備える。
(もっと読む)
変位計測システム
【課題】計測環境が変化したこと(すなわち、マルチパス環境が変化したこと)に起因する変位の誤検出を抑制し、計測精度の向上を図った変位計測システムを得る。
【解決手段】1台以上の発信機からの電波を複数台の受信機で受信し、受信信号の受信位相の組合せから算出した受信位相差の変化から発信機の変位を計測する変位計測部(60)と、あらかじめ取得した受信信号に基づく基準データと、変位計測時に取得した受信信号に基づく観測データとの相関係数が所定の閾値よりも低い場合には、計測環境の変化が発生したことを検出する環境変化検出部(40)と、計測環境の変化が検出された場合には、受信信号に対して計測環境が変化したことによる位相誤差を校正する校正処理部(50)とを備え、変位計測部は、計測環境の変化が検出された場合には、校正後の受信信号の受信位相の組合せから受信位相差を算出することで発信機の変位を計測する。
(もっと読む)
121 - 140 / 675
[ Back to top ]