
Fターム[5J062AA09]の内容
Fターム[5J062AA09]に分類される特許
201 - 220 / 675
周波数間バイアス推定装置及び周波数間バイアス推定方法
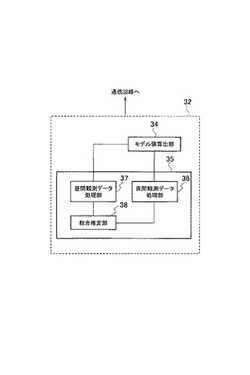
【課題】昼間と夜間との電離層の状態の違いを考慮してより正確な推定を可能とする周波数間バイアス推定装置及び周波数間バイアス推定方法を提供する。
【解決手段】複数の測位衛星から送信される衛星信号を受信する1以上の受信機を有し、衛星信号に含まれる測位情報を用いて位置情報を得る測位システムを利用する周波数間バイアス推定装置32であって、電離層電子密度モデル関数に基づき総電子数モデル値を算出するモデル値算出部34と、夜間に観測された衛星信号の観測値と総電子数モデル値とに基づいて第1受信機依存周波数間バイアスを推定する夜間観測データ処理部36と、昼間に観測された衛星信号の観測値と総電子数モデル値と第1受信機依存周波数間バイアスとに基づいて衛星依存周波数間バイアス補正量を算出するとともに、衛星依存周波数間バイアス補正量に基づいて第1衛星依存周波数間バイアスを推定する昼間観測データ処理部37とを備える。
(もっと読む)
GPS信号とGLONASS信号とを同時に受信するシステムのためのアナログフロントエンド
GPS信号とGLONASS信号の両方を受信するための受信機が提供される。この受信機は、アナログフロントエンド(AFE)と、AFEの出力を受信するためのGPSデジタルフロントエンド(DFE)およびGLONASS DFEと、GPS DFEおよびGLONASS DFEの出力を受信するためのデュアルモードインターフェース(DMI)とを含む。DMIの出力を受信するための検索エンジンが提供される。特に、AFEのいくつかのフロントエンド構成要素が、GPS信号とGLONASS信号の両方を処理するように構成される。 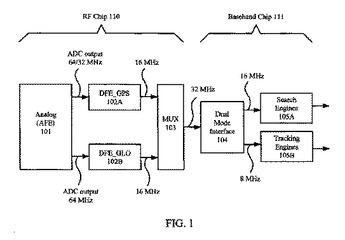 (もっと読む)
(もっと読む)
国識別コードを用いた位置フィルタリング
国識別コード(MCC)を用いた位置フィルタリングの方法、プログラム及びシステムを記載する。移動装置は、自身が接続される無線通信ネットワークのアクセスポイントの位置を用いて地理的位置を判定する。移動装置は、セルラネットワークを介して無線通信ネットワークの1つ以上のアクセスポイントの識別子及び現在のMCCを無線で受信する。移動装置は、現在のMCCに対応する地理的エリアのバウンディングボックスである多角形を識別する。移動装置は、受信した識別子を用いて位置データベースから識別した多角形内にあるアクセスポイント位置の集合を選択する。移動装置は、選択したアクセスポイント位置の集合の平均位置に基づいて移動装置の現在位置を判定する。 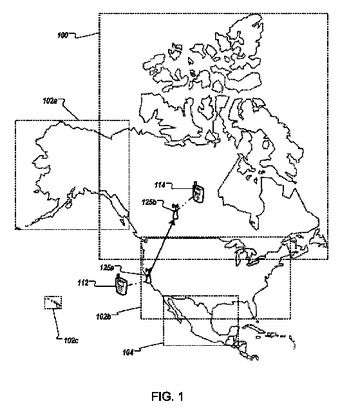 (もっと読む)
(もっと読む)
衛星測位システム受信機測位信頼度評価装置

【課題】衛星測位システムの受信機の測位の信頼度の評価の精度を向上させた衛星測位システム受信機測位信頼度評価装置の提供。
【解決手段】移動体に設置された衛星測位システムの受信機の測位信頼度を評価する測位信頼度評価装置であって、受信機の出力に基づいて受信機の測位誤差を推定して、当該測位誤差を第1評価パラメータとして算出する第1評価パラメータ算出部と、衛星測位システムに依拠しない計測手段の出力に基づいて第2評価パラメータを算出する第2評価パラメータ算出部と、少なくとも第1評価パラメータおよび第2評価パラメータを含んだ評価対象データの、所定のデータ集合に対するマハラノビス距離を算出するマハラノビス距離算出部と、マハラノビス距離に基づいて受信機の測位信頼度を評価する信頼度評価部と、を有する、測位信頼度評価装置。
(もっと読む)
無線受信装置及び航法データ取得方法
【課題】測位の時間を短縮し、測位成功確率を高めるとともに、消費電力を削減すること。
【解決手段】SPS受信部150は、航法データを間欠的に含むSPS信号を間欠受信する。測位演算部105は、SPS受信部150により受信したSPS信号より航法データを取得して測位を行う。航法データ取得判定部107は、測位演算部105において航法データの取得が可能である場合に、航法データの取得が完了するまでSPS受信部150におけるSPS信号の受信を継続させる。
(もっと読む)
電子密度推定装置及び電子密度推定方法
【課題】3次元の高さ方向及び水平方向の電離層電子密度分布をより正確に推定し、衛星で観測できない空間部分の推定も可能とする電子密度推定装置を提供する。
【解決手段】複数の測位衛星から送信される衛星信号を受信する1以上の受信機を有し、衛星信号に含まれる測位情報を用いて位置情報を得る測位システムを利用する電子密度推定装置であって、1以上の受信機の各々から複数の測位衛星の各々に対する擬似距離およびキャリア位相擬似距離に基づき衛星信号の通過経路の総電子数を算出する総電子数算出部と、電子密度を推定する3次元空間を設定し、当該3次元空間を複数の領域に分割する3次元電子密度推定空間設定部36と、総電子数算出部により算出された総電子数に基づいて3次元電子密度推定空間設定部36により分割された領域毎の電子密度を推定する暫定電子密度推定部38と、推定された電子密度に基づいて、同じ高さの電子密度を抽出し、球面調和関数を用いて高さ毎の電子密度分布を近似して推定する3次元電子密度推定部39とを備える。
(もっと読む)
測位システム及び測位方法
【課題】 測位に対する要求に応じて、適切な測位時間及び測位精度での測位を行う。
【解決手段】 測位サーバ10は、セルラ端末20における受信状態を示す受信状態情報に基づいて屋内外判定を行い、屋内外判定の結果に基づいて測位の終了条件を決定するハイブリッドアルゴリズム1によってセルラ端末20の測位を行う第1測位部12と、セルラ端末20における受信状態を示す受信状態情報に基づいてセルラ端末20の概算位置を算出して、当該概算位置の精度に基づいて、セルラ端末20の測位を終了するか否かを判断するハイブリッドアルゴリズム2によってセルラ端末20の測位を行う第2測位部13とを備える。
(もっと読む)
小型端末のGPS測位システム
【課題】 大幅なコストアップをせずに測位精度の向上を図る。
【解決手段】 小型端末のGPS測位システムは、無線LANと第1のGPS受信機を有する小型端末20と、無線LANのアクセスポイントであり第2のGPS受信機を有するホットスポット10とを有する。ホットスポット10は、第2のGPS受信機によるGPS測位によって得られた第1のホットスポット位置10aと、予め決められている第2ホットスポット位置10bとから誤差情報を求める。小型端末20は、誤差情報に基いて第1のGPS受信機によりGPS測位した端末位置を補正する。
(もっと読む)
位置標定装置
【課題】センサに高い精度や性能を要求することなく、位置標定精度を向上させることのできる位置標定装置を得る。
【解決手段】方位線データ入力部1は、センサ101からの方位線データを収集する。方位線データ信頼性判定部2は、方位線データ入力部1で収集した方位線データが予め定められた諸元範囲内の値であるか否かを判定し、諸元範囲内の方位線データのみを出力する。周波数分類部3は、方位線データ信頼性判定部2から出力された方位線データに基づいて予め定められた周波数で分類する。位置標定計算部4は、周波数分類部3で分類されたデータに基づいて、目標物の位置標定を行う。
(もっと読む)
ハイブリッド衛星測位受信機
【課題】衛星測位受信機を提供すること。
【解決手段】この受信機は、衛星測位信号を受信するRFフロント・エンドと、信号サンプルを生成するために受信された信号をサンプリングするアナログ/ディジタル変換器と、メモリと、符号位相および擬似距離を導出し、位置測定を計算するために信号サンプルを処理するプロセッサとを含む。このプロセッサは、位置測定を計算するために、サンプルが生成されるときにサンプルを処理するように動作可能である第1モードを有する。このプロセッサは、後の処理のためにサンプルまたは符号位相もしくは擬似距離をメモリに格納するように動作可能である第2モードをも有する。
(もっと読む)
測位用受信装置
【課題】本発明は、直接波とノイズを精度良く判別することができる、測位用受信装置の提供を目的とする。
【解決手段】スペクトラム拡散された信号をGPS衛星などの測位用衛星から受信する測位用受信装置であって、車速に応じて決められた時間内にアンテナ1によって受信した信号と拡散コードとの相関値を算出する相関器3と、相関器3によって算出された相関値の変化が車速と相関しているか否かによって、車速に応じて決められた時間内に受信した信号が直接波であるのかノイズであるのかを判定する判定部6とを備えることを特徴とする、測位用受信装置。
(もっと読む)
滞在地推定装置、方法及びプログラム
【課題】離散的で長い周期でしか位置データを取得できない場合でも、ユーザが日常的に滞留している滞在地を推定可能にする。
【解決手段】携帯端末MS1〜MSnから取得されたGPSデータをもとに、先ず位置情報生成部212により当該携帯端末MS1〜MSnの滞在地点及び移動先地点を地図データ上にメッシュ状に定義された地域単位で求める。次に滞留地点算出部213により、上記求められた滞在地点及び移動先地点の情報をもとに携帯端末MS1〜MSnの地域ごとの滞在確率を算出し、さらに滞留地点間可到達チェック部214により、時間帯別の移動確率を算出してこの時間帯別の移動確率から携帯端末の滞在地の遷移を推定するようにしたものである。
(もっと読む)
無線測位装置
【課題】第1の発受信手段、第2の発受信手段によって、2次元もしくは3次元の位置を高精度で測位できる装置を安価に実現する。
【解決手段】第2の発受信手段から少なくとも起点信号を含む無線信号を時分割でかつバースト信号として間欠発信し、第1の発受信手段において、前記無線信号を受信して前記起点信号を再生し、再生した起点信号に同期発振手段を同期させて生成した距離測定信号と、別に生成した方向測定信号とを含む無線信号を、複数のアンテナを周期的に切替えながら発信し、前記第2の発受信手段において、前記起点信号を基準とし、前記距離測定信号の位相を測定して第1の発受信手段からの距離を算出し、前記複数のアンテナに対応した方向測定信号の位相差を測定して第1の発受信手段が位置する方向を算出し、算出した距離と方向から自局の3次元の位置を高精度でかつ瞬時に測位する。
(もっと読む)
位置標定装置、位置標定方法、位置標定プログラム、速度ベクトル算出装置、速度ベクトル算出方法および速度ベクトル算出プログラム
【課題】GPS衛星の不可視時に車両の位置を高い精度で標定できるようにすることを目的とする。
【解決手段】GPS可視時において、GPS処理部120は各GPS受信機の搬送波位相に基づいて二重位相差残差を算出する。カルマンフィルタ150は二重位相差残差を用いてIMU処理部140の誤差補正量を算出する。IMU処理部140は加速度ベクトルと角速度ベクトルとに基づいて位置、姿勢および速度ベクトルを算出し、誤差補正量で補正する。横滑り特性学習部110は標定された速度ベクトルに基づいて横滑り特性を学習する。GPS不可視時において、ODO処理部130は車速パルスと横滑り特性とに基づいて速度ベクトルを算出し、標定された速度ベクトルとの残差を算出する。カルマンフィルタ150は速度ベクトル残差を用いて誤差補正量を算出し、IMU処理部140は誤差補正量を用いて位置、姿勢および速度ベクトルを標定する。
(もっと読む)
高度出力装置、高度出力方法及びプログラム
【課題】GPS信号に基づく3D測位による高度表示の不適切な変動を防止すること。
【解決手段】GPS信号に基づいて移動体のGPS高度を算出するGPS処理部と、気圧を計測する気圧計測部と、前記GPS処理部により算出されるGPS高度の信頼度を判定する判定部と、前記判定部により判定される前記信頼度に応じて、前記移動体の絶対高度を出力する出力部と、を備え、前記出力部は、前記信頼度が予め定義される出力基準を満たす場合には、前記GPS処理部により算出された最新のGPS高度を前記移動体の絶対高度として出力し、前記信頼度が前記出力基準を満たさない場合には、絶対高度の過去の出力値と前記気圧計測部により計測された気圧とを用いて算出される高度を前記移動体の絶対高度として出力する、高度出力装置を提供する。
(もっと読む)
移動距離算出装置及び移動距離算出方法
【課題】測位誤差を含む位置情報に基づいてユーザの移動距離を算出するに際して、誤差の影響を軽減することにより、移動距離の算出精度を向上する。
【解決手段】位置情報取得部11により複数の位置情報が取得され、移動軌跡判定部16により、時系列上で連続する3点の位置情報により形成される折れ角に基づいて、ユーザが曲線移動中であるか、直線移動中であるかが位置情報ごとに判定され、位置情報選択部17により、直線移動中と判定された位置情報の1つ以上が除去され、除去されなかった直線移動中の位置情報と、曲線移動中と判定された位置情報とが処理対象の位置情報として選択される。こうして選択された位置情報に基づくユーザの移動軌跡は、直線移動中において方向転換をしているかのような誤差が排除されたものとなる。従って、かかる位置情報に基づいて算出されるユーザの移動距離は、高精度なものとなる。
(もっと読む)
位置推定システム、通信端末、および位置推定方法
【課題】 近距離に位置する検索対象の通信端末の位置を精度良く推定すること。
【解決手段】 位置推定システムの携帯端末Aでは、被検索端末の位置を示すGPS位置情報に誤差がある場合であっても、Bluetooth通信部4におけるBT通信により、距離演算部5において得られる端末間距離情報によって近距離に位置する両端末間の距離を把握することができ、被検索端末のGPS位置情報にこの端末間距離情報を加味することにより、緯度経度演算部6によって、検索端末から近距離に位置する被検索端末の位置を精度良く推定することができる。また、被検索端末の位置をディスプレイ9によって表示することにより、携帯端末Aのユーザに対して被検索端末の位置を精度良く報知することができる。
(もっと読む)
データ送信装置及びデータ送信方法及び測位装置
【課題】時間の経過と共に更新が必要な測位の補正データについて、データ送信量の低減と、より新しい補正データの提供とを両立させ、提供する補正データの精度を向上させる装置を提供する。
【解決手段】データ送信部は、それぞれの測位補強情報を伝送周期10秒で伝送する。第1計算部は、データ送信部により所定の順序に従って伝送中の測位補強情報31−1の伝送周期10秒の間に、基準点固有誤差を新たに計算する。第2計算部は、伝送中の測位補強情報31−1の伝送周期10秒の間に、それぞれの測位補強情報41〜43を新たに計算された基準点固有誤差に基づいて新たに生成する。データ送信部は、新たに生成された測位補強情報41〜43のうちの一つの測位補強情報42−1を所定の順序に従って伝送中の測位補強情報31−1の次に配信装置に伝送すると共に、所定の順序を周期的に繰り返しながら、測位補強情報を順次に前記配信装置に伝送する。
(もっと読む)
位置決定におけるアンビギティーの解決方法
【課題】ノイズの有無にかかわらず環境における位置決定におけるアンビギティーを解決するための様々なヒューリスティック技術を使用する方法を提供すること。
【解決手段】最終的な位置決定解は、複数の曖昧な位置決定解から、クロック時間バイアス値を使用することにより、到着時間、そして/または、測距信号の受信電力レベルなどの測距信号順序に関する一貫性情報を使用することにより、ソースに距離を使用することにより、そして/または、最終的な位置決定解を選択するのに他の弁別器機能を使用することによって、1組の曖昧な位置決定解から決定しても良い。ヒューリスティックなアプローチの主要な利点は、余分な測定が位置決定解のアンビギティーの解消に必要でないということである。
(もっと読む)
移動体用測位装置
【課題】より正確に移動体の位置を算出すること。
【解決手段】衛星電波を用いて衛星と移動体との疑似距離を算出する疑似距離算出手段と、衛星電波から把握される衛星の位置と、位置演算手段又は他の手段により算出された移動体の位置と、を結ぶ視線ベクトルを算出する視線ベクトル算出手段と、道路が複数のリンクで表現された地図データを記憶した記憶手段と、地図データを用いたマップマッチングを行なって移動体の位置を算出するマップマッチング手段とを備え、視線ベクトル算出手段により算出された視線ベクトルとマップマッチング手段により移動体が存すると推定されたリンクとのなす角度に関する条件を含む所定条件を満たす場合にはマップマッチング手段により算出された移動体の位置に基づいて誤差情報を更新し、満たさない場合にはマップマッチング手段により算出された移動体の位置以外の情報を用いて誤差情報を更新する移動体用測位装置。
(もっと読む)
201 - 220 / 675
[ Back to top ]