
Fターム[5J062CC11]の内容
Fターム[5J062CC11]の下位に属するFターム
Fターム[5J062CC11]に分類される特許
281 - 300 / 456
センサのバイアス誤差推定装置

【課題】バイアス誤差を、センサを中心とした直交座標系においてオイラー角で定義する場合、バイアス誤差推定方式で定式化した際に観測行列の階数が足りず、正則とならないため、3次元の位置の観測値だけではバイアス誤差を推定することができない。
【解決手段】センサで観測した3次元の観測値からX、Y、Z軸の回転角のうち、1軸バイアス誤差補正器5により、1軸の回転角について取り得る範囲で複数パターン想定し、あらかじめ1軸の回転角のみ補正した観測値を求め、この補正後の観測値を用いて、2軸バイアス誤差補正器7により残りの2軸の回転角を推定する。2軸バイアス誤差補正器群8で推定した2軸の回転角と、1軸バイアス誤差補正器5で補正した1軸の回転角を1つの組合せとして、その中から最適なX、Y、Z軸の回転角を選択する推定値評価器9を設けて、バイアス誤差を推定するようにした。
(もっと読む)
位置検知方法

【課題】 絶対位置検知装置による移動軌跡に相対位置検知装置による移動軌跡をフィッティングさせる際に、少ない種類のパラメータで相対位置検知装置の位置を高精度に決定し維持する位置検知方法を提供する。
【解決手段】 相対位置検知装置の出力値と絶対位置検知装置の出力値とを併用して位置を検知する位置検知方法において、絶対位置検知装置の移動軌跡に相対位置検知装置で求めた移動軌跡をフィッティングさせるための回転角および移動量を求め、相対的位置検知装置の最新位置を上記回転角および移動量で補正し、補正された位置から新たな移動軌跡の検知を開始し、絶対位置検知装置の利用可能な新たな位置情報が得られるまでは、相対位置検知装置の出力値を上記回転角および移動量で補正し続ける。絶対位置検知装置の高精度区間における移動軌跡を用いて、相対位置検知装置の位置を補正できる。
(もっと読む)
設定環境で測位するためのシステムおよび方法
本発明は全地球航法衛星システムの信号が利用できない設定環境で位置決定を提供するシステムおよび方法に関する。この点に関して、狭域の標識信号のシステムは、傍受されたエネルギーの相関関係を必要とせずに既知の拡散符号によって、物理的に有意義な観測量を導き出すスペクトル圧縮のユニットによって受信されるスペクトラム拡散CDMA信号を生成する。本発明は既に配置されている通信資産と共存することができ、設計は自己校正を可能にするので、設置と使用法が単純化される。本発明は、例えば、倉庫在庫管理、捜索救難活動、屋内環境内での資産追跡において、GNSS信号が利用できない、あるいは制限されているところでの応用に便利である。 (もっと読む)
無加入ワイヤレス・デバイス位置検出
ワイヤレス・デバイスの位置検出技法は、ワイヤレス・デバイスが、ワイヤレス・ネットワーク内部において地理的に分散する基地局が送信した信号の測定を行うことを伴う。これらの送信機について、送信機位置、送信信号電力、信号伝搬、および送信信号タイミングのような、何らかのキー・サイト情報が分かっていれば、位置検出対象デバイスによるこれら送信信号の測定値を用いて、デバイスの位置を判定することができる。この例では、デバイスと位置検出ノードとの間における情報交換の全ては、位置推定プロセスにおいて用いられる信号を供給するワイヤレス・ネットワークが提供しないデータ・リンクによって促進される。したがって、デバイスがワイヤレス・ネットワークの一部でない場合でも、ネットワークによってワイヤレス・サービスを提供されていない場合でも、更にはワイヤレス・ネットワークに信号を送信する能力を有していない場合でも、デバイスが行うダウンリンク信号測定に基づいて、デバイスの位置を検出することができ、位置検出を容易にするために、ワイヤレス・ネットワークの通信資源を消費することはない。 (もっと読む)
位置判定受信機を含む緊急ワイヤレス位置検出システム
ワイヤレス位置検出システムは、ボイス・オーバー・インターネット−プロトコル(VoIP)アダプタに接続されたワイヤレス・デバイスの地理的位置検出を含むことができる。VoIPアダプタは、ワイヤレス送受信機またはワイヤレス位置判定受信機を含むことができ、VoIPアダプタに接続されたワイヤレス・デバイスの位置検出を容易にする。ワイヤレス送受信機または位置判定受信機は、位置情報を緊急通信指令係に提供することができる。 (もっと読む)
側位システムおよび無線通信装置
【課題】移動局と基地局および基地局同士の同期システムが不必要であり、設置する基地局数が最低1個あれば移動局の位置を算出することの可能な側位システムを提供する。
【解決手段】1つの基地局200により側位の対象となる移動局100は、タイミング信号をトリガにして生成された超広帯域(UWB)方式による信号を基準拡散符号(PN0)で拡散して基準拡散信号とする基準拡散器104と、基地局から反射信号を受信する第1、第2の受信部110、118と、第1の受信部で受信した信号から所定の拡散符号(PN1)との相関により反射信号を検出する第1の相関器114と、第2の受信部で受信した信号から所定の拡散符号(PN1)との相関により反射信号を検出する第2の相関器118と、第1、第2の相関器により検出された反射信号とタイミング信号との時間差を測定する時間差測定部126とを備える。
(もっと読む)
周波数応答整合を使用した無線周波数ナビゲーション
無線ナビゲーションの方法は、多数の可能性のあるデバイス位置のそれぞれに対して周波数応答を予測する工程を含み得る。方法はまた、実際のデバイス位置において周波数応答を測定する工程も含み得る。方法は、測定周波数応答を予測周波数応答の1つと整合させて、推定デバイス位置を決定する工程であって、推定デバイス位置は、測定周波数応答に最も密接に整合する1つの予測周波数応答に関連付けられた可能性のあるデバイス位置に対応する、工程をさらに含み得る。  (もっと読む)
(もっと読む)
LOSリンク予測および測定前LOS経路フィルタリングを用いた三辺測量のための方法および装置
三辺測量のための方法は、複数のLOS経路の各々を経由して信号を受信するステップと、各LOS経路の性能を予測するステップとを含み得る。この方法はまた、性能が所定の閾値に満たない、LOS経路経由で受信した信号をフィルタリングによって除去するステップを含み得る。この方法はさらに、装置の位置を実質的に決定するために、フィルタリングされていない信号を用いて三辺測量を行なうステップを含み得る。 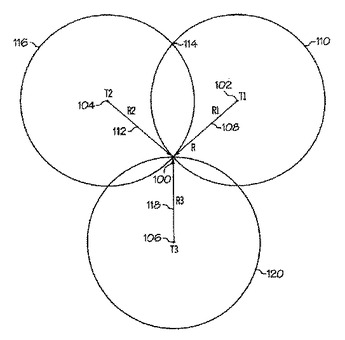 (もっと読む)
(もっと読む)
受信機帯域幅が限られた広帯域OFDM送信機の位置検出
直交周波数分割多重化(OFDM)ディジタル変調方式を用いるワイヤレス送信機の位置検出システム。OFDM方式は、既定の広帯域チャネルにおよぶ複数の既定の狭帯域周波数チャネルで信号成分を送信することを含む。本システムは、既定の狭帯域周波数チャネルの小部分において、位置検出対象の第1ワイヤレス送信機が送信した信号成分の小部分を受信し、位置検出関係測定値を得るために信号成分の小部分を処理するように構成された第1受信システムを含む。更に、本システムは、第1ワイヤレス送信機が送信した信号成分の小部分を受信し、位置検出関係測定値を得るために、信号成分の小部分を処理するように構成された少なくとも1つの第2受信システムを含む。また、本システムは、ワイヤレス送信機の位置を計算するために、第1および第2受信システムからの位置検出関係測定値を用いるように構成された処理システムを含む。 (もっと読む)
側位システムおよび無線通信装置
【課題】2つの基地局の設置だけで、移動局の相対位置を移動局自身で高精度に検出することの可能な、側位システムを提供する。
【解決手段】第1、第2の基地局200、300により側位の対象となる移動局100は、タイミング信号をトリガにして生成された超広帯域(UWB)方式による信号を基準拡散符号(PN0)で拡散して基準拡散信号とする基準拡散器104と、基準拡散信号を第1、第2の基地局に送信するアンテナ108と、第1の基地局および第2の基地局から信号を受信するアンテナ110と、受信した信号から第1の拡散符号との相関により第1の拡散信号を検出する第1の相関器114と、受信した信号から第2の拡散符号との相関により第2の拡散信号を検出する第2の相関器118と、第1の拡散信号および第2の拡散信号とタイミング信号との時間差を測定する時間差測定部120とを備える。
(もっと読む)
ワイヤレス・デバイスの位置検出をし易くするためにセル送信機パラメータを自動的に決定するシステム
ワイヤレス・デバイスの位置を検出する様々な技法では、移動局(MS)が、ワイヤレス・ネットワーク内部において地理的に分散する基地局が送信する信号の測定を行うことを伴う。一部のキー・サイト情報が、送信機の位置、送信信号電力、信号伝搬、および送信信号タイミングのように、これらの送信機に関することが分かっている場合、MSによるこれら送信信号の測定を用いて、MSの位置を判定することができる。送信機を検出し、キー送信機情報を識別し、基地局送信信号を利用して位置検出を実行する自動方法を提案する。加えて、この方法は、複数のワイヤレス・ネットワークの一部であるセル・サイト送信信号を使い易くする。 (もっと読む)
ネットワーク時空情報配信システム,ネットワーク時空情報配信装置,時空情報を受信する端末装置,およびネットワーク時空情報配信方法
【課題】 高精度の時刻情報および空間情報からなる時空情報をネットワークへ配信する。
【解決手段】 時空情報配信装置10は,GPSアンテナ11で受信したGPS信号から当該装置の空間情報を取得し,時刻情報と空間情報とを含む時空情報パケットを生成し,正秒ごとにLAN3にブロードキャストする。クライアントである端末装置2は,LAN3から時空情報パケットを受信し,受信時ごとに,時刻同期情報を用いて現在時刻への時刻変換パラメータを算出する。そして,要求があれば,時空情報パケットの時刻情報から時刻変換パラメータを用いて現在時刻を算出し,空間情報からクライアント空間情報を取得する。
(もっと読む)
到着時間推定器の最適閾値選択の方法
以下の発明は、地理位置情報技術に関するものである。詳細には、提案の方法は、推定誤りを最小限に抑える最適閾値を決定するのに使用することができる。また、提案の方法は、考慮される信号対雑音比(SNR)に従って閾値を適応的に変動させることも可能にする。これは、あらゆるチャネル条件下で、すなわち、見通し線内(LOS)シナリオと見通し線外(NLOS)シナリオの両方で、最適閾値が選択されるようにするためである。加えて、提案の方法は汎用的で、システムに依存せず、コヒーレント(整合フィルタ(MF)など)受信機にも、非コヒーレント(エネルギー検出器(ED)など)受信機にも適用することができる。 (もっと読む)
無線測位システムおよび無線測位方法
【課題】本発明の目的は、高速で移動する移動体の位置座標を高精度で測位するシステムと無線測位方法を提供することである。
【解決手段】本発明では、移動体は測位基準点となる複数のマーカ装置に測位要求信号を同報送信し、複数のマーカ装置は測位要求信号を受信した時に、測位データを前記マーカ装置固有の通信チャンネルを用いて前記移動体に送信し、前記移動体は前記測位データによる前記マーカ装置の座標、マーカ装置までの往復時間を用いて移動体の現在位置座標を決定する無線測位システムを用いる。移動体と複数マーカ間における測位の通信時間が短縮され、移動体の正確な測位が可能となる。
(もっと読む)
海上レスキュー位置の記録システム
【課題】グローバル・ポジショニング・システム(Global Positioning System、GPS)を使用せず、無線伝送の方式で各ステーションのデータバックを伝送や記録する海上レスキュー位置の記録システムを提供する。
【解決手段】グローバル・ポジショニング・システム(GPS)を使用せず、多重ジャンプモジュール式無線伝送を使用し、デジタル通信ネットワークを通じて少なくとも一つの固定ステーションと複数の可動ステーションとの間に信号を伝送すると共に、信号を含むパケットを記録し、該パケットは、各可動ステーションのデータベースに暫く記録され、該可動ステーションの信号伝送範囲に他の可動ステーションが存在すれば、パケットの伝送や記録を行い、該システムは少なくとも1つの固定ステーションと複数の可動ステーションを有することを特徴とする。
(もっと読む)
位置検出システム、再送信装置、擬似GPS信号発生器および位置検出方法
【課題】GPS衛星からのGPS信号が受信不可能な屋内や地下道等でも、正確な位置検出が可能な位置検出システムを提供する。
【解決手段】航法メッセージ復調部22にて復調したGPS衛星からのGPS信号に含まれる航法メッセージのうち、時計誤差補正に関する衛星時刻補正係数バイアス項を、電波到達不能空間に再送信する屋内アンテナの設置位置を模擬するように衛星時計補正パラメータ再計算処理部23にて再計算し、再送信用の航法メッセージとして補正する。しかる後、補正した航法メッセージを航法メッセージ再変調部24にてIF信号に変調し、さらに、Lバンド周波数変換/増幅部25にてGPS衛星からのGPS測位信号と同一の信号形式のLバンドの補正GPS信号にアップコンバートして、屋内アンテナから出力する。また、特定位置にてGPS信号を受信したものと仮定して、前記補正GPS信号と同等の擬似GPS信号を生成して出力しても良い。
(もっと読む)
位置管理システム
【課題】対象者の位置を検出し管理するシステムにおいて、位置管理方法が屋内と屋外とで相違し、利用者にとって使い勝手が悪い。
【解決手段】携帯端末2にGPS機能と無線タグ40とを搭載する。屋内の管理対象領域にはタグリーダ4を設置し、無線タグ40の存在を検出して、検出情報を管理センタ6へ送信する。管理センタ6は、無線タグ40を検知しているタグリーダ4の位置情報及びGPS機能により取得する位置情報を共通の座標形式で管理する。利用者からの位置確認要求があった場合、タグリーダ4又はGPSによる位置情報が示す位置を表示する地図画像を生成して、利用者へ通知する。
(もっと読む)
無線LANを基盤とする測位システム内の測位誤差を推定するためのシステムと方法
【課題】本発明は無線LAN対応装置の位置を推定する無線LAN測位システムで利用するための位置推定の期待誤差を推定する方法を提供する。
【解決手段】この無線LAN対応装置は無線LAN対応装置の帯域の無線LANのアクセスポイントによって伝達される信号を受信する。この方法は無線LAN対応装置の帯域の無線LANのアクセスポイントからの受信した信号に基づいて、無線LAN対応装置の位置を推定する。本法はまた、無線LAN対応装置の帯域の無線LANのアクセスポイントの特性に基づいて無線LAN対応装置の位置推定の期待誤差を推定し、この期待誤差は位置推定の相対精度を予測する。
(もっと読む)
測位システム、探知装置、測位装置、測位システムの測位方法、探知装置の探知方法、測位装置の測位方法、探知装置の探知プログラムおよび測位装置の測位プログラム
【課題】目標物を測位するために探知装置と測位装置との間で必要な通信帯域を少なくする。
【解決手段】基準信号送信装置120が目標10に向けて送信波30を発信し、各探知装置100は送信波30が目標10で反射した反射波32を受信する。各探知装置100は受信した反射波32に基づいて基準信号送信装置120が送信波30を送信してから探知装置100が反射波32を受信するまでの時間を算出し、算出した時間のみを特徴情報として測位装置140に送信する。測位装置140は各探知装置100から受信した各特徴情報に基づいて基準信号送信装置120から目標10を経由した各探知装置100までの距離を算出し、算出した距離と基準信号送信装置120の座標と各探知装置100の座標とに基づいて目標10の位置を測位する。
(もっと読む)
中空フレームの精密測定のためのグローバル座標生成方法
【課題】中空フレームの製作時に3次元座標を生成するグローバル座標生成方法を提供する。
【解決手段】本発明のグローバル座標生成方法は、中空フレームの基準面に送信機及び基準面の座標を生成するためのレファレンスセンサを設置し、レファレンスセンサで測定された位置座標から基準面のローカル座標系を生成するステップ、第1垂直面の共通地点にレファレンスセンサを設置し、その座標を測定し格納するステップ、第1垂直面に送信機及びレファレンスセンサを設置し、そのローカル座標系を生成するステップ、共通地点の座標を用いてローカル座標系をグローバル座標系に変換するステップ、他の垂直面の各ローカル座標系をグローバル座標系に変換するステップ、上部面に送信機を設置し、そのローカル座標系とグローバル座標系の関係を求めるステップ、及び前記関係からグローバル座標系を生成し適用するステップを含む。
(もっと読む)
281 - 300 / 456
[ Back to top ]