
Fターム[5J062CC11]の内容
Fターム[5J062CC11]の下位に属するFターム
Fターム[5J062CC11]に分類される特許
81 - 100 / 456
UMTS無線定位のための協調受信機選択
ソフトハンドオーバーをサポートする無線通信ネットワーク(WCN)では、TDOA、AOA、TDOA/AOA、または混成ネットワーク基盤あるいはネットワークオーバーレイの無線定位システム(WLS)のための協調主体受信機選択では、サービングセルとしての1つ以上のネットワーク基地局に対処しなければならない。アクティブなセットが2つ以上の構成員を含む場合に、所在地推定のための信号収集に使用する協調受信機と復調受信機のセットを決定する2つの技術を開示する。一実施形態によると、アクティブセット構成員は、代替サービングセルとして使用される単一の構成員に建設的に減じられる。他の実施形態によると、アクティブセット構成員の有する情報が保持され、復調受信機と協調主体受信機の新規セットが、アクティブセットの全メンバーシップに基づいて生成される。 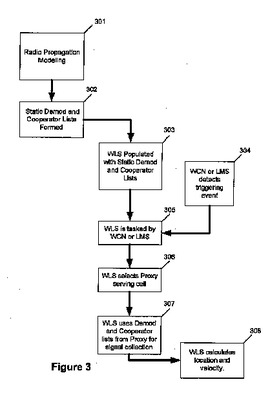 (もっと読む)
(もっと読む)
測位装置、測位方法、プログラム及び撮像装置
【課題】測位手段による測位の不安定な状態における位置情報の精度の向上を図る。
【解決手段】CPU10は、撮影位置において自律航法測位による継続的計測及びGPS測位による所定タイミング毎の測定を開始する。そして、CPU10は、GPS測位によって得られた少なくとも2以上の位置データに基づいて算出される移動ベクトルと、自律航法測位によりGPS測位によって得られた位置データとそれぞれ同時期に得られた2以上の地点における移動ベクトルとの差が所定範囲以内である場合に、少なくとも2以上の位置データのうちの何れかに基づいて位置情報取得地点を定める。そして、CPU10は、位置情報取得地点における位置データと自律航法測位により継続的に計測されてきた位置データとに基づいて撮影位置の位置データを求める。
(もっと読む)
方位角推定装置、方法及びプログラム

【課題】方位角計測センサを用いずに、位置計測センサの計測値のみから、方位角を推定する。
【解決手段】時刻ステップt−1において方位角Φs(t−1)の対象物が行動a(t−1)を取ったときに、時刻ステップt−1において(Zxa(t−1),Zya(t−1))に位置し、時刻ステップtにおいて(Zxa(t),Zya(t))に位置する確率P(Zxa(t),Zya(t),Zxa(t−1),Zya(t−1)|Φs(t−1),a(t−1))を用いて、Bel(Φs(t−1))=P(Zxa(t),Zya(t),Zxa(t−1),Zya(t−1)|Φs(t−1),a(t−1))・Bel0(Φs(t−1))の関係を満たす、時刻ステップt−1において対象物の方位角がΦs(t−1)である更新後確率Bel(Φs(t−1))を計測更新部18が計算する。
(もっと読む)
紛失モバイル端末機の位置推定システム、方法及びモバイル端末機
【課題】紛失された携帯電話の電源がOFFになった場合、他の非常用の一時的バッテリーによって信号を送受信することで紛失された携帯電話の位置追跡を可能にする。
【解決手段】本発明の一様態に係る位置推定システムは、活性化信号を送信し、活性化信号に応答したモバイル端末機から端末機IDとGPS位置情報を受信し、端末機ID及び距離情報の受信時間と端末機ID及びGPS位置情報を伝送する多数の基地局及び各基地局の位置と、各基地局から伝送された受信時間及びGPS位置情報を利用して端末機IDに対応するモバイル端末機の位置を推定するコンピューティング装置を有する。
(もっと読む)
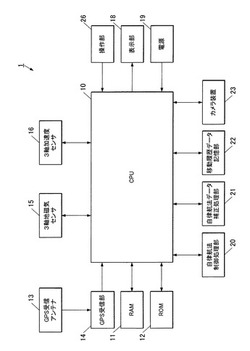
携帯ナビゲーションシステム
【課題】GPS電波が届きにくい場所でも利用でき、位置検出精度が高い携帯ナビゲーションシステムを提供する。
【解決手段】予め定められた位置に、互いに周波数が異なる交流磁界を発生する少なくとも3個の磁界発生源4a〜4cが配置されている。携帯端末2に搭載されている3軸磁気センサ3aを用いて、交流磁界を検出する。そして、交流磁界を周波数毎に分解し、周波数毎の交流磁界の強さを算出する。この値から、携帯端末2から磁場発生源までの距離を算出し、携帯端末2の位置を特定する。これにより、GPS電波が届きにくい場所でも、ユーザ6の進行開始位置を精確に特定することが可能になる。また、ユーザ6が移動した場合には、自律航法によってユーザ6の現在位置を特定する。
(もっと読む)
位置決定におけるアンビギティーの解決方法
【課題】ノイズの有無にかかわらず環境における位置決定におけるアンビギティーを解決するための様々なヒューリスティック技術を使用する方法を提供すること。
【解決手段】最終的な位置決定解は、複数の曖昧な位置決定解から、クロック時間バイアス値を使用することにより、到着時間、そして/または、測距信号の受信電力レベルなどの測距信号順序に関する一貫性情報を使用することにより、ソースに距離を使用することにより、そして/または、最終的な位置決定解を選択するのに他の弁別器機能を使用することによって、1組の曖昧な位置決定解から決定しても良い。ヒューリスティックなアプローチの主要な利点は、余分な測定が位置決定解のアンビギティーの解消に必要でないということである。
(もっと読む)
測位装置及び測位方法
【課題】様々な環境下で測位を行う際、測位する環境によっては過去に経験した測位精度の低下を繰り返してしまう恐れがある。
【解決手段】位置情報信号を受信して現在位置を測位するリファレンス測位手段11と、自律航法により現在位置を測位するセンサー測位手段12と、リファレンス測位手段11及びセンサー測位手段12において測位したときの測位環境を示す推定ゲイン情報14を記憶する記憶部13とを有する。リファレンス測位手段11及びセンサー測位手段12は、記憶部13に記憶されている推定ゲイン情報14に基づいて現在位置を測位する。
(もっと読む)
位置特定方法、測位システム及びプログラム
【課題】マルチパスによる計測誤差の影響を低減し、精度よく通信端末の位置を特定する。
【解決手段】位置を特定するための計測距離を、当該計測距離の信頼性が低い場合にほぼ零となる値を出力し、それ以外の場合に計測距離に応じた値を出力する評価関数を用いて評価する。これにより、計測距離に含まれる誤差が大きい場合には、当該計測距離を除外し、信頼性の高い計測距離のみに基づいて、通信端末の位置を特定することが可能となる。このため、マルチパスによって計測距離に誤差が含まれたとしても、精度よく通信端末の位置を特定することができる。
(もっと読む)
無線測位システム、無線測位方法、及び、プログラム
【課題】無線を用いて位置を測位するのに好適な無線測位システム等を提供する。
【解決手段】本発明に係る無線測位システムは、移動端末と無線通信を行う通信部と、移動端末と無線通信が行われるいずれかの基地局の位置と、当該移動端末の位置と、の距離を測定して算出する測距算出部と、各基地局と移動端末との距離を示す測距データを、累積して記憶する記憶部と、複数の測距データのうち、所定範囲に含まれるデータを、代表距離データとして抽出する抽出部と、各基地局に対応付けられる各代表距離データに基づいて、当該各基地局と移動端末との各代表距離を算出し、当該各代表距離に基づいて、当該移動端末の位置を測位する測位部と、を備える。
(もっと読む)
測位装置、及びこれを用いたセンサ情報の統合解析による見守りシステム
【課題】無線ビーコン装置からのビーコン信号に基づき、人・動物・物等の位置を、高い測位精度及び外部ノイズや信号欠落への頑健性を持ちつつ推定することができる測位装置、及びこれを用いた見守りシステムを提供する。
【解決手段】確率的遷移による遷移後のパーティクルpi’{座標値i’,重みi}、及びそのビーコンパタンBP(pi’)を計算し、得られたビーコンパタンBP(pi’)と実際の受信ビーコンパタンBP(Receiver)とを用いた尤度計算による遷移後のパーティクルpi’{座標値i’,重みi}のパーティクルフィルタリングを行い、前記尤度を用いた遷移後のパーティクルpi’{座標値i’,重みi}の重みiの更新による新しいパーティクルpi’’{座標値i’,重みi’}を計算し、これら各処理のループを繰り返す。
(もっと読む)
無線通信システムにおける測位のための基準信号送受信方法及び装置
【課題】無線通信システムにおける測位のための基準信号送受信方法及び装置を提供する。
【解決手段】基地局は、複数のスーパーフレームの各々を構成するフレームの中で2番目のフレームにプライマリーアドバンスト(PA)プリアンブルを配置し、1番目及び3番目のフレームの1番目のシンボルにセカンダリーアドバンスト(SA)プリアンブルを配置し、位置基盤サービス(LBS)区間に属する複数の連続した第1のスーパーフレームを決定し、第1のスーパーフレームの各々を構成するフレームの中で最後のフレームの1番目のサブフレームの1番目のシンボルに位置基盤サービスのための基準信号を含め、送信するデータが存在する場合、第1のスーパーフレームを除いた第2のスーパーフレームの各々を構成するフレームの中で最後のフレームの1番目のサブフレームの1番目のシンボルに前記データを含め、第1及び第2のスーパーフレームを用いて端末と通信する。
(もっと読む)
測位システム、測位方法及び測位プログラム
【課題】 GPSによる位置測位が成功しない場合等であっても、高精度の測位結果を得る
【解決手段】 測位サーバ10は、位置と当該位置おけるGPS衛星40からの信号の受信が可能か否かとの関係を示す情報をGPS衛星40毎に保持したGVMデータベース12と、セルラ端末20において信号が受信されたGPS衛星40を示す受信GPS情報を取得するGPS情報取得部13と、GVMデータベース12に保持された情報に基づき、受信GPS情報からセルラ端末20の位置の候補を推定する候補推定部14と、セルラ端末20におけるセルラ基地局30からの電波の受信状態を示す受信状態情報を取得する受信状態情報取得部15と、候補推定部14によって推定されたセルラ端末20の位置の候補、及び受信状態情報からセルラ端末20の位置を推定する基地局測位演算部17と、を備える。
(もっと読む)
無線ネットワークでの位置検出
第1のノードAが第1のメッセージを第2のノードBに送信する。第2のノードBは第2のメッセージを第1のノードに送信する。第1のメッセージの送信開始から第2のメッセージの受信開始までの第1経過時間が測定される。第1のメッセージの受信開始から第2のメッセージの送信開始までの第2経過時間が測定される。第2のノードBは第2経過時間を含む第3のメッセージを第1ノードAに送信する。第1のノードAと第2のノードBとの間の距離は、第1経過時間と、第2経過時間と、第2のメッセージに含まれるカウント校正乗数または第3のメッセージに含まれるカウント校正乗数とに基づいて演算される。ノードは無線メッシュネットワーク内を移動してもよい。ノードの位置情報及び当該ノードから近隣のノードまでの距離が測定され、ネットワークマネージャに送信されて蓄積される。 (もっと読む)
ナビゲーション信号送信機、ならびにナビゲーション信号生成方法
【課題】地上において送信されるナビゲーション信号の周波数偏差低減するナビゲーション信号送信機を提供する。
【解決手段】送信波を受信し所定のデータフレームに同期した同期パルスを生成させる受信部と、前記受信部から生成されたパルスを基準信号として内部クロック原振を生成する基準信号同期部と、前記内部クロック原振に基づいてIMES信号を生成するIMES信号生成部と、前記IMES信号生成部で生成されたIMES信号を送信する送信アンテナとを備えたナビゲーション信号送信機であって、前記基準信号同期部は、周波数カウント部とループカウンタと電圧制御発信器とからなり、前記周波数カウント部においては、前記送信波から入力された信号を基準信号として前記電圧制御発信器で生成されるクロックのパルス数をカウントすることによって所定周期のパルスを取り出すことを特徴とする。
(もっと読む)
超高感度距離又は位置計測システム
【課題】三次元位置を正確に測位できるシステムを提供する。
【解決手段】UWB送受信機1と、サーバー3と、UWB用RFタグTとを、備え、UWB送受信機1は、RFタグTから反射されるM系列のPN符号を、同期加算及び相関計算する。
(もっと読む)
伝播特性に基づいたスポットのカテゴリー分け
複数のスポットの種類を定義および決定することと、複数のスポットをそのようなスポットに関連する信号伝播特性に少なくとも部分的に基づいてカテゴリー分けすることとに関連する1つまたは複数のプロセスまたはオペレーションを容易にするまたはそうでなければサポートするために利用され得る例示的な方法、装置、または製品が、本明細書において開示される。 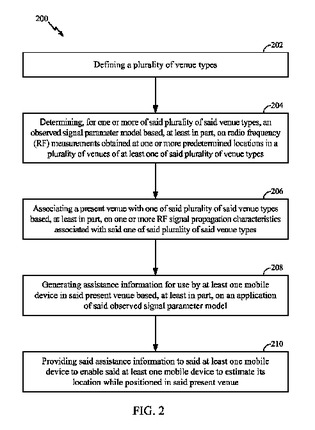 (もっと読む)
(もっと読む)
屋内コンテキスト情報を送信するための方法および装置
本明細書に開示した対象は、モバイル機器の位置に関する屋内コンテキスト情報を決定するためのシステムおよび方法に関する。屋内コンテキスト情報は、モバイル機器またはネットワーク要素によって、屋内環境内のモバイル機器の位置の推定を取得するために利用できる。 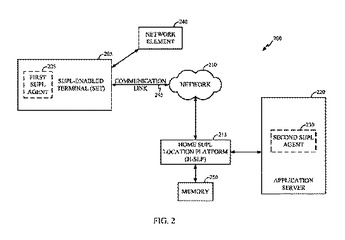 (もっと読む)
(もっと読む)
GPS信号受信機及びGPS信号送信機
【課題】
GPS信号送信機とGPS信号受信機によって、GPS衛星から送信されるGPS信号を受信出来ない屋内での短時間での位置情報の取得を実現する。
【解決手段】
複数のGPS信号送信機から送信されるGPS信号を受信する受信部と、GPS信号のPRN番号を特定するPRN番号特定部と、GPS信号に含まれるPRN番号に対応する信号の先頭位置を特定する先頭位置特定部と、PRN番号に対応する位置情報を取得する位置情報取得部とを有する。先頭位置特定部は、特定された先頭位置を用いて他のGPS信号送信機から送信されたGPS信号に含まれるPRN番号に対応する信号の先頭位置を特定し、PRN番号特定部は、先頭位置特定部によって特定された他のGPS信号送信機から送信されたGPS信号に含まれるPRN番号に対応する信号の先頭位置を用いて他のGPS信号送信機から送信されたGPS信号のPRN番号を特定する。
(もっと読む)
位置判断システムにおいて粗位置注入を限定すること
位置判断システム(PDS)受信機が複数のソースから独立したロケーション情報を収集する。これらの複数のロケーション情報は、ロケーションの整合性を判断するために分析される。ロケーションが様々な独立して収集されたロケーション情報の間で整合する場合、ロケーション情報は、より効率的な捕捉および測位のためにPDS測位プロセスに注入される。そうではなく、不整合が発見された場合、ロケーション情報はPDS測位プロセスに注入されない。 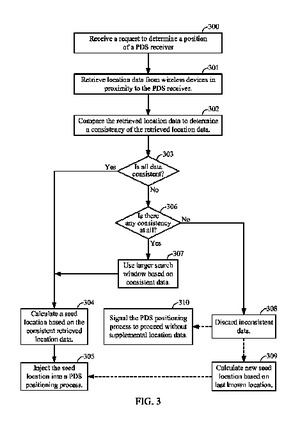 (もっと読む)
(もっと読む)
受信波の波源位置推定装置及び波源方向推定装置、並びに受信波の波源位置推定方法及び波源方向推定方法
【課題】近傍波源の受信波の場合に、計算負荷を低減しつつ、推定精度の劣化が抑制された波源位置推定装置を提供する。
【解決手段】波源位置推定装置は、アレーアンテナ24aにより電波又は音波を受信して受信波の波源の位置を推定する。波源位置推定装置は、各受信素子が受信した受信波の入力ベクトルを算出し、代数的手法を用いた波源の位置算出の際に近傍波源の位置特定を可能とする変換行列を算出し、前記入力ベクトルと前記変換行列とを基に代数的手法によって波源の位置を算出する。
(もっと読む)
81 - 100 / 456
[ Back to top ]