
Fターム[5J062CC11]の内容
Fターム[5J062CC11]の下位に属するFターム
Fターム[5J062CC11]に分類される特許
321 - 340 / 456
測位装置、測位装置の制御方法及びプログラム
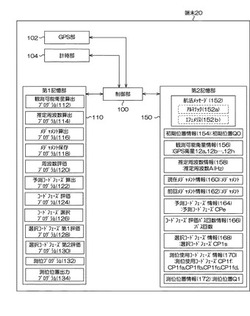
【課題】電波強度が微弱な弱電界下において、測位基礎符号の位相の精度を検証したうえで、精度良く測位することができる測位装置等を提供すること。
【解決手段】各発信源ごとに少なくとも1つの周波数系列において測位装置20が発生するレプリカ測位基礎符号と測位基礎符号との相関処理を行って測位基礎符号の位相を算出する位相算出手段と、現在の前記位相を予測して予測位相を算出する予測位相算出手段と、現在の位相と予測位相との位相差が予め規定した位相差許容範囲内か否かを判断する位相差評価手段と、各発信源ごとに位相差が最小の位相を選択して選択位相とする位相選択手段と、選択位相の信号強度が最大か否かを判断する選択位相第1評価手段と、選択位相が属する周波数系列における前記位相が、連続して位相差許容範囲内であった回数が予め規定した規定回数範囲内であるか否かを判断する選択位相第2評価手段等を有する。
(もっと読む)
RF技術を用いた物体の追跡における低減された減衰のための方法およびシステム
無線周波数(RF)ベースの物体の識別、追跡、および位置特定のための方法およびシステム。本方法およびシステムは、より低い周波数範囲のVHFで狭帯域幅信号を使用し、伝搬損失およびRF位置特定信号の精度の低下を最小限に抑える。信号は、マスタユニットからタグまで送信される。信号移動時間が記録され、マスタとタグとの間の距離が計算される。本方法およびシステムは、VHF帯域を使用することによって、より長距離のRF信号の透過および正確さの向上を達成することができる。デジタル信号処理およびソフトウェア規定無線技術が使用される。無線によって送受信される実際の波形は、ソフトウェアによって定められる。マスタユニットおよびタグの役割は、逆にすることができる。 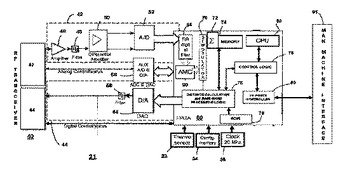 (もっと読む)
(もっと読む)
移動通信網における往復遅延時間情報を用いた位置推定方法及びシステム

【課題】ネットワーク管理システムに格納された情報と往復遅延時間とを用いて移動端末機の位置を正確に算出できる位置推定方法及びシステムを提供する。
【解決手段】本発明による移動端末機の位置推定システムは、移動端末機の往復遅延時間情報を算出する基地局と、上記移動端末機の往復遅延時間情報を受信する基地局制御器と、上記移動端末機のサービスエリアを拡張する中継器と、上記中継器に連結され、上記中継器の往復遅延時間情報を測定する往復遅延時間測定部と、を含み、上記移動端末機の往復遅延時間情報及び上記往復遅延時間測定部により測定された往復遅延時間情報を用いて上記移動端末機の位置を推定する位置推定装置をさらに含むことができる。
(もっと読む)
センサネットシステム、センサネット位置特定方法
【課題】 端末の位置を特定する。
【解決手段】センサネットシステムにおいてセンサノードの通信を傍受するロケータノードを用いてセンサノードの位置を特定し、センサノードの位置及びID情報に基づいたサービスを行うシステムを提供する。
(もっと読む)
サブフレーム同期化測距
【解決手段】通信ノード間の距離を決定する方法である。本方法は、第1のノードから少なくとも1つの第2のノードへの初期通信フレーム送信を含む。初期通信フレームは、フレームプリアンブル、第1のデータ及び第1のスイッチポイントを含む。本方法は更に、フレームプリアンブルに基づいて少なくとも1つの第2のノードのローカルクロックを同期化することを含む。受信されたスイッチポイントに基づいて少なくとも1つの第2のノードを送信ノードに切り換える。少なくとも1つの第2のノードから第1のノードに後続の通信フレームを送信する。後続の通信フレームは、測距プリアンブル、第2のデータ及び第2のスイッチポイントを含む。本方法は、少なくとも1つの第2のノードからの測距プリアンブルに基づいて第1のノードのローカルクロックを同期化し、測距プリアンブルに基づいて第1のノードと第2のノードとの間の距離を決定することによって継続する。 (もっと読む)
無線通信において高度な位置決めを提供するための方法及びシステム
本明細書に開示された実施形態は、無線通信システムにおいて、改良された位置決め(例えば、到着時刻)測定及び有利な位置決めを提供するための方法及びシステムに関する。実施形態において、アクセスポイントは、対応するセクタ内でアクセス端末によって知られている予め定められた時間で、情報(例えばデータ)送信を、「知られている」("known")送信(又は「参照送信」」と置き換えることができる。アクセス端末は、受信された参照信号を、位置決め測定を実行するために用い、測定された情報を折り返し報告する。アクセスポイントは、例えば位置ベースのサービスを必要とするアクセス端末からの要求に応答して、オンデマンドで参照送信を送ることもできる。 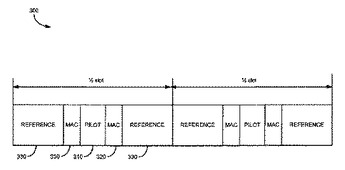 (もっと読む)
(もっと読む)
位置情報提供システム、位置情報提供装置および屋内送信機
【課題】電波が届かない場所において位置情報を提供する。
【解決手段】位置情報提供装置が実行する処理は、受信された測位信号を取得するステップ(S610)と、測位信号の発信源を特定するステップ(S612)と、測位信号の発信源が屋外である場合に、測位信号に含まれる航法メッセージを取得するステップ(S622)と、その信号に基づいて位置を算出するための処理を実行するステップ(S624)と、測位信号の発信源が屋内である場合に、測位信号からメッセージデータを取得するステップ(S630)と、そのデータから座標値を取得するステップ(S632)と、その座標値に基づいて位置情報を表示するステップ(S650)とを含む。
(もっと読む)
受信信号に世界時を関連付ける方法
【課題】無線測位システムの端末での信号の識別成分の到達情報の時間に世界時を関連付ける方法を提供する。
【解決手段】無線測位システムの端末での信号の識別された成分の到達時間情報に世界時を関連付ける方法。本方法では、関連する世界時タグを有するマーカ信号がタイミングデバイスから得られ(又はマーカ信号が、独立した発振器から得られて、世界時タグがマーカ信号に割り当てられ)、マーカ信号と(又は、それぞれ識別成分の到達時間情報と)発振器との間の時間又は位相関係が測定される。発振器に対する識別成分の到達時間情報が判断され、世界時タグ及び測定時間又は位相関係から識別成分の到達時間情報に対応する世界時が計算され、その後、計算された世界時が、到達時間情報に関連付けられる。
(もっと読む)
無線通信装置
【課題】同期処理が不要で、消費電力の小さな無線通信装置を提供する。
【解決手段】互いに無線通信する第1無線機1と第2無線機2とを備え、第1無線機1は、距離測定信号を送信するとともに、距離測定信号の送信タイミングで送信タイミング信号を出力する送信回路3と、折り返し信号を受信するとともに、折り返し信号の受信タイミングで受信タイミング信号を出力する受信回路5と、送信タイミング信号に対する受信タイミング信号の時間差を遅延時間として測定する遅延時間測定回路7と、遅延時間に基づいて、第1無線機1と第2無線機2との距離を演算する距離演算回路8とを含み、遅延時間測定回路7は、並列に接続され互いに遅延特性の異なる複数の遅延回路D1〜Dnを有し、送信タイミング信号を複数の遅延回路D1〜Dnを介して遅延させた遅延送信タイミング信号と、受信タイミング信号とを用いて遅延時間を測定するものである。
(もっと読む)
無線通信システム,無線通信方法,発信制御装置,及び通信装置
【課題】どのような場所であっても、無線通信を行なう通信装置の動作を制限するエリアを高精度に設定できるようにして、かかるエリア内における通信装置の動作の管理を確実に実行できるようにする。
【解決手段】通信装置20の位置を検出させるための位置検出用電波を発信する複数の発信器10−1〜10−4をそなえ、通信装置20が、複数の発信器10−1〜10−4から発信された位置検出用電波をそれぞれ受信すると、受信した複数の位置検出用電波に基づいて、通信装置20の位置を検出する検出部と、この検出部によって検出された通信装置20の位置に応じた所定の動作態様で動作する処理部とをそなえて構成する。
(もっと読む)
移動体制御システム及び移動体の可動部の絶対位置算出方法
【課題】移動体の可動部の絶対位置を精度よく算出することができる移動体制御システムを提供する。
【解決手段】 移動体と、送信時間情報を含んだ信号を送信する装置とを備えた移動体制御システムであり、移動体は、本体と、可動部と、可動部を駆動するアクチュエータと、本体に取付けられ、信号を受信する信号受信部と、信号から信号受信部の絶対位置を算出する位置算出部と、アクチュエータの駆動量検出部と、位置算出部で算出された位置情報と検出された駆動量から可動部の絶対位置を算出する機能部を備えており、絶対位置算出部は、タイマと、検出される駆動量を検出時間と共に記憶する記憶部と、送信時間情報から信号が送信された時点の駆動量を記憶部の中から特定する特定部と、その駆動量と本体位置算出装置で算出した位置情報から、信号送信時の可動部の絶対位置を算出する算出部を備えている。
(もっと読む)
位置情報提供システム
【課題】 路側に多くのセンサーを配備設置することなく、多くの移動体の所在位置を認知および提供できる位置情報提供システムを提供すること。
【解決手段】 小型電波発信器11からの電波を受信するアンテナ17と、この受信電波を以後の処理方式に合った周波数に変換する周波数変換部18と、アナログ信号をディジタル信号に変換するA−D変換部19と、受信電波の到来方向を推定処理する到来方向推定処理部20と、受信電波の画像処理と前記移動体12との距離を画像演算処理する画像化処理部21と、受信電波の受信範囲内の背景を撮影する撮影部22と、その背景と画像化処理部21による電波の可視化画像とを合成処理する画像合成処理部23と、受信電波の発信位置が位置情報として取得対象か否かを判定する保護対象判定処理部24と、取得された固有情報を解読するRFID受信解読処理部25と、カーナビゲーション位置情報26と固有情報とをVICS入出力部27に出力する位置情報生成処理部28などとからなる。
(もっと読む)
携帯電子機器の状態を追跡する方法
本発明は、携帯電子機器の状態を追跡する方法と、前記方法を実行するように構成される処理装置を備える携帯電子機器とに関する。携帯電子機器の状態を追跡する方法であって、(i)前記携帯電子機器の前記状態を、複数のセルを含む格子を用いて表すことであって、前記セルの各々は、1つ以上の状態変数により規定される状態空間における領域を表すと共に、前記携帯電子機器の前記状態が状態空間におけるその領域内にある確率値を有し、前記格子は、既定の閾値を超える確率値を有するセルのみを含むように境界付けられることと、(ii)1つ以上の状態変数の値を示す測定信号を入手することと、(iii)前記格子の前記確率値を更新し、前記格子を再び境界付けることとを、反復的に実行することを含む方法が提供される。 (もっと読む)
測位用信号の再送信装置
【課題】衛星からの信号が届きにくい環境において、GPS測位を可能にするために信号を再送信するにあたって、低コストであるとともに、変更が容易なシステムを実現する。
【解決手段】GPS衛星31からの信号をアンテナ32で受信し、伝送路34を介して、屋内のアンテナ38から再送信するようにした再送信装置において、伝送路34をLANなどの汎用のデジタル伝送路とし、このためアンテナ32の受信信号を信号変換部33でデジタル信号へ変換して伝送路34へ送信し、信号復元部36で伝送路34からのデジタル信号を受信してGPS信号を復元し、アンテナ38から再送信する。したがって、同軸ケーブルによる接続を、アンテナ32,38と、その近くに設けられる信号変換部33または信号復元部36との間だけとし、設計および施工の手間を削減でき、かつ材料費も削減することができ、低コストであるとともに、変更を容易にできる。
(もっと読む)
移動局の位置検出方法及びその移動局、位置検出装置、基地局
【課題】 基地局から移動局の往復時間を元に位置を算出する際の移動局での処理時間に対して考慮がなされた移動局の位置検出方法及びその移動局、基地局、位置検出装置を得ることを目的とする。
【解決手段】 移動局30から位置測位の要求があった場合に、すくなくとも3つ以上の各基地局21〜24が、位置検出装置10の指令に基づいて移動局30に対して測距信号を送信するステップと、移動局30は、受信した前記測距信号に対してA/D変換した後、特定の符号を用いて拡散変調を行った移動局受信データを生成するステップと、位置検出装置10は、受信した前記移動局受信データに対して特定の符号を用いて逆拡散を行い、前記逆拡散された前記移動局受信データを用いて前記測距信号の送信時から前記移動局の着信時までの時間を算出するステップとを備えた。
(もっと読む)
位置検知装置および位置検知プログラム
【目的】この発明は、基地局から複数のアンテナあるいは複数組のアンテナを周期的に切替えながら発信される報知情報と測定信号を含む高周波信号を携帯端末により受信し当該携帯端末の3次元の位置あるいは相互間の距離あるいは相互間の方向を高精度で検知するための位置検知装置および位置検知プログラムに関するものである。
【構成】基地局10の複数あるいは複数組のアンテナ11a〜11dから伝送経路68a〜68dを経由して伝送される高周波信号を携帯端末20により受信し、当該受信した高周波信号の搬送波信号あるいは副搬送波信号あるいは変調信号あるいはベースバンド信号の相対位相を算出することにより、当該携帯端末20の3次元の位置69を高精度で検知する。
(もっと読む)
疑似GPS装置
【課題】屋内や地下などで移動端末によるGPS測位を可能にする疑似GPS装置において、設計および施工の手間を削減できるとともに、拡張や変更が容易な装置を実現する。
【解決手段】単にGPS衛星からの信号を再送信するのではなく、アンテナ22の位置で移動端末20が受信すべき擬似的なGPS信号を単体のGPSシミュレータ21で発生し、複数のアンテナ22から放射することで、移動端末20に高精度な測位を行わせることが可能な疑似GPS装置において、GPSシミュレータ21は、所定時間分のデジタルデータを発生し、LANケーブル26,24を介して各信号変換器23を順次アドレス指定して送信する。したがって、同軸ケーブル27による接続を、アンテナ22と、その近くに設けられる信号変換器23との間だけとし、設計および施工の手間を削減でき、かつ材料費も削減することができ、低コストであるとともに、変更が容易な装置を実現できる。
(もっと読む)
無線通信システムにおいて端末の速度を推定するための方法と装置
【課題】端末の速度を効率的にかつ正確に推定する。
【解決手段】端末、端末と通信している基地局、および2以上の衛星の各々の位置を始めに決定する。擬似距離の変化の残差率も、例えば(1)端末の移動によるドップラー周波数シフトを含む推定されたベースバンド周波数誤差および(2)衛星による移動による推定されたドップラー周波数シフトに基づいて、各衛星に対して決定される。端末、基地局、および衛星の決定された位置、および衛星に対する決定された擬似距離の変化の残差率に基づいて一組の方程式を形成する。端末の速度は、その一組の方程式に基づいて推定することができる。
(もっと読む)
編隊を組む宇宙船グループ内の一宇宙船用の、2周波数信号を解析することによる相対位置制御装置
編隊を組んで移動する宇宙船のグループの、1つの宇宙船(S1)用の制御装置(D)は、
i)宇宙船(S1)の面に設置され、選ばれた周波数ギャップにより隔てられた第一と第二の周波数を示す、第一と第二のRF信号を発信及び/又は受信可能な、3つのアンテナ(A1〜A3)から成る集合体と、
ii)アンテナにより受信され、そして他の宇宙船に由来する第一と第二の信号に基づき、第一の周波数及び周波数ギャップに対応する、アンテナ(A1〜A3)間の、第一と第二の経路長の差を決定する任務を負う第一の測定手段(M1)と、
iii)宇宙船(S1)により経験された回転の測定値を届ける任務を負う、第二の測定手段(M2)と、そして
iv)
a)第一と第二の初期経路長の差に基づき、受信した信号の伝送方向を粗く推算し、
b)前記宇宙船に結び付けられた座標系の選ばれた軸が、粗い伝送方向に対して揃えられるように、宇宙船(S1)の位置調整を指令し、
c)選ばれた軸を中心とした宇宙船(S1)の回転駆動を指令し、
d)回転測定、及びこの回転により引き起こされる第一の経路長の差の変化測定に基づき、他の宇宙船(Si’)により発信された信号の伝送方向を正確に推算する任務を負う、処理手段(MT)とを備える。 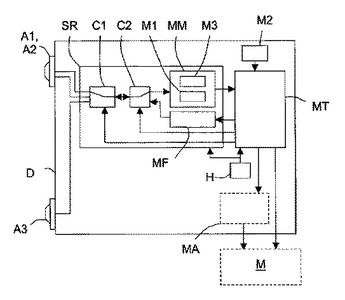 (もっと読む)
(もっと読む)
全地球型衛星航法システム
第1および第2の衛星航法システム(NSS)の各々は、第1のおよび第2の仕様によってそれぞれ作動するのに適している。また、各々は第1および第2の複数の衛星ビークル(SV)をそれぞれ含んでいる。第1および第2の複数のSV各々は、第1および第2の複数のユニークな対応する識別子(ID)によってそれぞれ識別されるのに適合されている。プロセッサは、第1の複数のユニークな対応するIDに応じて第1の複数のSVから送信される、第1の複数の通信信号を受信し識別するのに適している。プロセッサは、第2の複数のユニークな対応するIDに応じて第2の複数のSVから送信される、第2の複数の通信信号を受信し識別するのに適合されている。プロセッサは、第1の複数の通信信号および第2の複数の通信信号の受信および識別に応じて位置ロケーション情報を決定するのに適合されている。 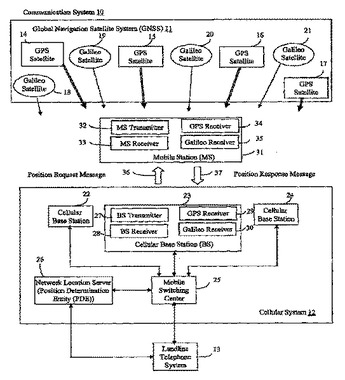 (もっと読む)
(もっと読む)
321 - 340 / 456
[ Back to top ]