
Fターム[5J062CC11]の内容
Fターム[5J062CC11]の下位に属するFターム
Fターム[5J062CC11]に分類される特許
261 - 280 / 456
位置推定システム及び無線通信端末並びに位置推定装置
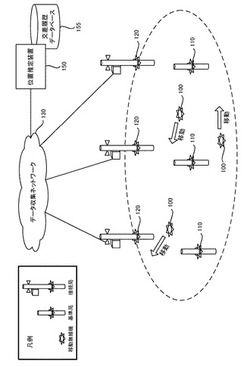
【課題】近距離通信機能を用いた簡単なシステム構成によって、高精度の位置推定を実現する。
【解決手段】所定エリア内に複数の基準局110や接続局120が設置される。所定エリア内を移動する移動無線機は近距離無線通信機能を有しており、別の移動無線機又は基準局とすれ違うたびに相手装置の機器IDを受信して交差履歴データとして蓄積する。また、位置推定装置150にアクセス可能な接続局と通信できる位置に移動すると、蓄積した交差履歴データを位置推定装置にアップロードする。移動無線機からアップロードされた交差履歴データは交差履歴データベース155に格納される。位置推定装置は全基準局の設置位置を把握しており、位置推定対象の移動無線機から直接アップロードされた交差履歴データや、別の移動無線機の交差履歴データに含まれている位置推定対象の移動無線機との交差履歴に基づいて、位置推定対象の移動無線機の移動経路を推定する。
(もっと読む)
絶対位置決めモード及び相対位置決めモードを含む位置決め装置、方法、並びにプログラム
本発明は、絶対位置決めシステム及び相対位置決めシステムを使用して位置を判定するように構成される位置決め装置(PD)に関する。位置決め装置は、絶対位置決めシステム及び場合によっては相対位置決めシステムを使用して位置を判定する第1のモード、並びに相対位置決めシステム及び場合によっては絶対位置決めシステムを使用して位置を判定する第2のモードで動作するように構成される。絶対位置決めシステムは、第2のモードにおいてよりも第1のモードにおいてより重点を置かれ、位置決め装置は、第1のモードから第2のモードに切り替えるように構成される。位置決め装置(PD)はデジタル地図データベース(DMD、3DMD)へのアクセスが可能であり、第1のモードから第2のモードへの切り替えは、地図データベース(DMD、3DMD)に格納された情報と組み合わせて、少なくとも判定された位置に基づいて決定される。 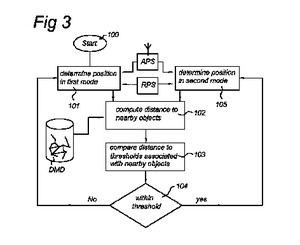 (もっと読む)
(もっと読む)
ロケーションベースのトラッキング
ここに開示される主題は、RF環境の変化に応じて、位置決定方式を使用して位置フィックスを得ることに関する。  (もっと読む)
(もっと読む)
測位システム、移動通信端末、測位方法、測位サーバ、測位用ICチップ、及び測位プログラム

【課題】移動通信端末が送信又は受信する電波にマルチパスによる遅延が生じた場合であっても、移動通信端末の測位をより正確に行うことができるようにする。
【解決手段】本発明の測位システム1は、セルラ端末10の位置を測位するシステムである。送受信部21がセルラ端末10から電波を受信する。伝搬時間算出部22が、受信された電波に関する伝搬時間を算出する。位置算出部31が、算出された伝搬時間と当該算出された伝搬時間におけるマルチパスによる伝搬遅延分を補正するための補正値とに基づいて、セルラ端末10の位置を算出する。よって、受信した電波がマルチパスによる遅延が生じた遅延波であっても、その伝搬遅延分を補正するので、より正確にセルラ端末10の測位を行うことができる。
(もっと読む)
位置特定システム
本発明は、特に患者1の体内で介入器具2を位置特定するのに使用されることができる位置特定システムに関する。前記位置特定システムは、電磁信号をプローブ経路20及び基準経路に沿ってそれぞれ伝搬する成分に分離する電磁波源10を有する。前記プローブ経路20は、位置特定されるべき点において前記信号を放射する信号出口22と、前記放射された信号を獲得する少なくとも1つの検出器23とを有する。相関器は、プローブ経路20及び基準経路30に沿ってそれぞれ伝搬した信号成分間の相関を決定するのに使用される。前記基準経路の長さを知ると、プローブ経路20における信号出口22と検出器23との間の未知の距離は、相関情報に基づいて推定されることができる。 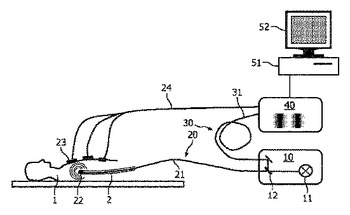 (もっと読む)
(もっと読む)
位置推定方法および位置推定装置
【課題】無線を使用した位置推定において、無線に対する遮蔽物の影響を排除し、高精度に位置を推定する位置推定方法を得ること。
【解決手段】本発明は、固定設置された複数の基準局と位置推定装置により構成された位置推定システムにおいて、位置推定装置がシステム内の移動端末の位置を推定する場合の位置推定方法であって、遮蔽物の物理的性質および移動端末が送信する電波の物理的性質に基づいて、位置に関する補正情報を予め算出しておく補正情報算出ステップと、各基準局と移動端末との間の伝搬時間に基づいて移動端末の位置を推定する位置推定ステップと、位置推定ステップにおける推定結果が遮蔽物の影響による推定誤差を含んでいるか否かを判断する判断ステップと、判断ステップにより推定結果が遮蔽物の影響による推定誤差を含んでいると判断された場合に、予め算出しておいた補正情報を用いて推定結果を補正する補正ステップと、を含んでいる。
(もっと読む)
測位システム
【課題】複数の移動局間の距離が測定可能とする場合に、測定された複数の移動局間の距離を用いて移動局の測位の精度の向上する。
【解決手段】測位部による測位結果に基づいて移動局の位置に対する存在確率を算出する存在確率算出部と、第1の測距部よりも高い測距精度を有し複数の移動局間の距離を測定する第2の測距部と、第2の測距部により測定される複数の移動局間の距離に基づいて複数の移動局の位置の組み合わせを抽出する移動局位置抽出部と、前記存在確率に基づいて前記複数の移動局の位置の組み合わせに対応する確率評価値を算出するとともに、最も確率評価値が高い複数の移動局の位置の組み合わせを選択する移動局位置選択部と、測位部による測位結果である複数の移動局位置を移動局位置選択部によって選択された移動局の位置の組み合わせとなる様に補正する移動局位置補正部とを設ける。
(もっと読む)
無線測位システム、移動体、そのプログラム
【課題】自律型ロボット等の自律的に移動できる移動体が、無線測位可能な環境下で、障害物の影響による誤差を少なくし、高精度に測位を行う。
【解決手段】ジャイロ23及び回転数検知用エンコーダ24によって移動方向、移動量を検知することで位置推定する。この位置推定は、移動量が多くなるに従って誤差が増大する。また、無線端末21によって各基地局との無線通信を行うことで無線測位を行う。そして、任意の各地点毎に、無線測位結果に基づいて無線測位可否データ、通信状態データを生成して、その位置座標に対応付けて記憶することを繰返すことでこれらデータを蓄積する。データ蓄積量が多くなるに従って、蓄積したデータを参照すれば、無線測位不能/可能なエリアが分かるようになるので、例えば目的地が無線測位不能エリア内にある場合には、無線測位不能エリア内での移動距離が少なくなるように移動制御する。
(もっと読む)
ローカル位置を取得し、情報をオーバーレイするための方法および装置
複数のデバイスおよびオブジェクトの少なくとも一部分の間で相対位置情報を特定するための方法およびシステムを開示する。この相対位置情報は、それらの複数のデバイスおよびオブジェクトに対応するセンサデータおよび個々の情報属性のうちの少なくとも1つに基づく。それによって、他の任意の位置参照システムを使用することなく動作するピアツーピア無線ネットワークを用いた高精度、低費用の測位参照ベースシステムを実現する。 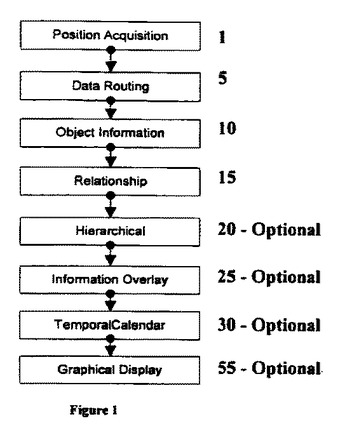 (もっと読む)
(もっと読む)
移動局位置推定方法及び移動局位置推定装置
【課題】精度の高い位置検出を実現する。
【解決手段】移動局の移動可能領域における位置に対し精度劣化係数が最小となる基地局の組である最適基地局組を決定する最適基地局組決定工程と、選択した1の基地局組である選択基地局組を用いて移動局の位置を算出したとき、算出に用いた選択基地局組と、算出された前記移動局の位置に対応する最適基地局組とが一致するかを判断する基地局組照合工程と、前記基地局組照合工程による照合において一致しないと判断された場合には、選択基地局組を前記最適基地局組に変更する選択基地局組変更工程とを有し、前記選択基地局組変更工程によって変更された選択基地局組を用いて再度移動局の位置算出を実行する。
(もっと読む)
位置推定システム、及び、位置推定方法
【課題】 測定対象の位置を高い精度で推定可能な位置推定システム及び位置推定方法を提供する。
【解決手段】 測定対象の位置を示す測定データを取得すると、当該測定データに基づいて座標系上に所定の確率分布P(x)を設定し、当該確率分布P(x)を用いてパーティクルをサンプリングするパーティクルフィルタを備え、当該パーティクルフィルタによりサンプリングしたパーティクルから当該測定対象の位置を推定する位置推定システムにおいて、前記パーティクルフィルタに用いる確率分布P(x)は、最高確率が所定の範囲で均一であることを特徴とする。
(もっと読む)
移動局の静止判定を利用した位置検出システム
【課題】移動局の静止判定を用いた精度が高い位置検出システムを提供する。
【解決手段】移動局において、フレーム識別手段によりフレーム識別情報が付され、静止判定手段により移動局が静止しているか否かが判定され、少なくともフレーム識別情報と静止判定手段による結果とを含む信号が発信される。基地局において、基地局情報送信手段により、少なくとも基地局識別番号と受信されたフレーム識別情報と距離関連情報測定手段による距離関連情報とからなる基地局情報が測位サーバに送信される。測位サーバにおいては、距離関連情報測定誤差算出手段により、移動局が静止している場合には基地局情報に基づいて距離関連情報測定誤差が算出され、重み行列算出手段により距離関連情報測定誤差に基づいて重み行列が算出され、測位手段において距離関連情報と重み行列とに基づいて移動局の位置が算出される。
(もっと読む)
通信制御方法及び通信装置
【課題】通信相手側となる全通信装置からGPS位置情報を得無くとも、移動端末の位置を特定することができる通信制御方法及び通信装置を提供する。
【解決手段】複数の相手側通信装置との間の距離を算出する距離算出ステップと、算出を複数のタイミングで実行し、当該実行によって得られた複数の距離情報に基づいて、各相手側通信装置との間における相対速度を算出するステップと、算出した各相手側通信装置との間における相対速度と、各相手側通信装置の距離情報とに基づいて、各相手側通信装置の位置関係を示す仮想のマップを生成するステップと、生成した仮想のマップに基づいて所定の動作を実行するステップと、を含む。
(もっと読む)
携帯端末装置、その高度等の計測方法、その計測プログラム、及びその計測プログラムを格納した記録媒体
【課題】人工衛星の電波を用いる測位に関し、衛星電波の受信可能な衛星数が少ない場合にも測位性能を向上させ、測位時間を短縮することにある。
【解決手段】通信機能を備える携帯端末装置(4)の高度又は測位を算出する構成であって、携帯端末装置の位置で検出した気圧情報又は携帯端末装置で外部から取得した気圧情報と概略位置情報とを用いて携帯端末装置の概略位置における基準気圧を算出し、この基準気圧と携帯端末装置の位置での検出気圧とを用いて携帯端末装置の前記概略位置の高度を算出している。また、この高度と外部から取得した測位情報とにより、携帯端末装置に測位情報を提供する。このような構成により、衛星電波の受信可能な衛星数が少ない場合にも測位性能を向上させ、測位時間を短縮することができ、また、簡便で精度の高い高度値の算出を可能にしている。
(もっと読む)
強化されたセルアイデンティティの適応的な測位における適応的なポリゴンの計算
セルラー通信ネットワークにおいて位置決定支援データを提供するための方法は、ユーザ機器についてのセルリレーション構成を確立するステップ(204)を含む。上記セルリレーション構成は、信号が受信時に特定の無線条件基準を満たすセルのセルアイデンティティを含む。上記方法は、上記ユーザ機器について高精度位置決定を実行するステップ(206)をさらに含む。上記確立するステップ及び上記実行するステップ(204、206)は、複数回繰り返される。同じ上記セルリレーション構成に属する測位点は、クラスタ化され(208)、ポリゴンが各結果クラスタと関連付けられる(212)。上記関連付けるステップ(212)は、結果クラスタをポリゴンによって包囲するステップ、予決定された基準を改善するために上記ポリゴンの角を定義されたパスに沿って変更するステップ、及びポリゴンの角が外周の小規模部分に集まることを是正するステップを含む。上記方法は最後に、上記セルリレーション構成と上記ポリゴンとの間のリレーションを含む位置決定支援データを作成するステップ(212)を含む。 (もっと読む)
測位のためのシステムおよび方法
搬送信号およびベースバンド信号を含む変調連続波を送波するように構成された、近似範囲内で移動可能な送波装置と、送波装置によって送波された信号を受波し、かつ送波装置から受波した搬送信号およびベースバンド信号の両方の解析に基づき、近似範囲内の送波装置の位置を決定するように構成された受波ユニットとを備えた、小空間測位のためのシステムが提供される。また、搬送信号およびベースバンド信号を含む変調連続波を送波装置から送波するステップと、送波装置によって送波された信号を、相互に予め定められた距離に配置された受波器により受波するステップと、送波装置から受波した搬送信号およびベースバンド信号の両方の解析に基づいて近似範囲内で送波装置の位置を決定するステップとを含み、送波装置および受波器の一方が近似範囲内で移動可能であり、他方が予め定められた位置に配置された、小空間測位のための方法も提供される。 (もっと読む)
測位システム、測位方法及び測位プログラム
【課題】 電波の発信源から移動通信端末に到達する電波に遅延波が含まれる環境であっても、移動通信端末の測位を正確に行う。
【解決手段】 セルラ端末20の位置を推定する測位システムを構成する測位サーバ10は、複数のセルラ基地局30とセルラ端末20との間で送受信された電波に基づいて算出される距離を示す情報を取得する距離情報取得部13と、セルラ端末20に受信された電波の方向を示す情報を複数、取得する方向情報取得部14と、複数の電波の方向を示す情報から、予め記憶された範囲算出ルールに基づいて、セルラ基地局30からセルラ端末20への方向の範囲をセルラ基地局30毎に算出する仮想セクタ算出部15と、距離及び方向の範囲に基づいてセルラ端末20の位置を算出する位置算出部16と、を備える。
(もっと読む)
三次元座標による捜索対象の位置通知システム、その方法及びそのプログラム
【課題】三次元座標で捜索対象の位置を正確に測定することができるシステムであり、なおかつ、それを低コストで実現できるシステムを提供する。
【解決手段】4箇所以上の基地局を設置し、各基地局の時刻について同期を取る。捜索対象となる端末からIDとシーケンス番号を1回発信する。これを、各基地局で受信して時間情報を付加し、端末に送信する。端末で算出する。そして、三次元座標での正確な捜索結果を割り出す。これにより、GPSなどの高コストなシステムを使用せずに三次元的に捜索対象を捜索するシステムを実現できる。
(もっと読む)
物体又は人物の位置探知システム
【課題】
【解決手段】
静止あるいは移動中の物体(3)または人物の位置を探知するシステムであって、少なくとも1つの高周波通信手段と位置探知装置(2)と、探知対象装置(1)の通信手段との通信を確立するための高周波通信手段とを含んでいる。位置探知装置(2)は、少なくとも1つの角度決定手段(10)と、探知対象装置(1)と位置探知装置(2)との間の距離(d)を決定するために位置探知装置(2)の通信手段によって受信される探知対象装置(1)の通信手段からの信号を処理する手段と、位置探知装置(2)の3つの異なる一時的地理的位置での少なくとも3組のペアの測定値から“方向”ベクトルと称されるベクトルを計算するための計算手段と、をさらに含んでおり、それぞれのペアの測定値は、位置探知装置(2)と探知対象装置(1)との間で計算された距離(d)と角度(θ)とを含んでおり、角度(θ)は、地理的および一時的な第1位置と第2位置との間、あるいは地理的および一時的な第2位置と第3位置との間で位置探知装置が移動した距離を表す直線と地磁北とによって定義され、第1の一時的地理的位置は位置探知装置の起動位置または座標の原点(0,0)である。
(もっと読む)
移動通信端末装置
【課題】 GPS受信機を利用して目的地に誘導する移動体通信端末であって、総消費電力の低い移動体通信端末を提供することを目的としている。
【解決手段】 移動体通信端末101の制御部8は、基地局201からの到来電波を、基地局電波送受信部2で受信し、目的地から距離の遠い基地局からの到来電波を受信した場合は、消費電力の低い基地局現在地測位部3に基づき現在位置を測位し、目的地周辺領域の基地局からの到来電波を受信した場合は、測位精度の高いGPS現在地測位部6に基づいて現在位置を測位する。
(もっと読む)
261 - 280 / 456
[ Back to top ]