
Fターム[5J062CC11]の内容
Fターム[5J062CC11]の下位に属するFターム
Fターム[5J062CC11]に分類される特許
181 - 200 / 456
ネットワークにおいて位置特定されるデバイスのロケーションを求めるための方法及び装置、並びにそのコンピュータプログラム
【課題】既知のロケーションを有する一群のデバイスを含むネットワークにおいて位置特定されるデバイスのロケーションを求めるための方法を提供する。
【解決手段】少なくとも1つの送信信号の到達時刻を得るステップ、到達時刻の少なくとも一部について、各到達時刻についてのパラメータを求めるステップ、求められた各パラメータについて、2つの拡張パラメータを求めるステップ、各nタプルの拡張パラメータについて、既知のロケーションを有する少なくとも2つのデバイスの位置及びnタプルの拡張パラメータを考慮する関数から点の集合を求めるステップ、既知のロケーションを有する各デバイスの位置及びすべての拡張パラメータを含む条件を満たす、求められた点の集合のうちの点を選択するステップ、並びに選択された点から、位置特定されるデバイスのロケーションを求めるステップ、を含む。
(もっと読む)
緊急通報システム

【課題】 管理人が一度に駆けつけることができるように、呼び出し位置である可能性が高い場所を呼び出し位置の候補として提示する。
【解決手段】 無線子機の操作により呼出信号が送信されると、集合住宅内に設置されている受信機は呼出信号を受信し、その受信レベルを測定する。管理室親機では、居住者がの住戸と居住者が通常の生活で行くであろう場所とを予測居所情報として記憶しておき、受信レベルが大きい順番に受信機の設置場所を示す設置場所情報を取得して、予測居所情報と一致するものを優先して呼び出し位置の候補として表示させる。これにより、受信レベルの大きい受信機の設置場所が、異なる階であったり離れた場所であったりして、管理人が一度に駆けつけることが困難な複数の場所である場合に、居住者の居る可能性が高い場所が呼び出し位置の候補として優先して表示されるので、表示を見た管理人は、その場所へ迅速に駆けつけることができる。
(もっと読む)
位置情報処理システム
【課題】位置情報を,位置情報送信機,または位置情報受信機側に過大な負荷を与えることなく,その位置において要求される精度または範囲で提供する。
【解決手段】屋内において位置情報を提供する位置情報送信機と,当該位置情報を受信する位置情報受信機とからなる位置情報処理システムであって,前記位置情報送信機が送信する位置情報を,位置情報の精度に応じて分割した上で非同期に送信し,前記位置情報受信機において当該分割された情報を組み立てて,または組み立てることなく,当該位置情報を取得する。
(もっと読む)
測位システム及び処理装置
【課題】電波の見通し環境が得られない空間において、センサ、無線タグ、通信端末装置等が取り付けられていない移動物体の位置を測定する。
【解決手段】処理装置は、端末装置が取り付けられた第1の移動物体による受信波形の第1の解析結果と前記端末装置の位置とを対応付けてデータベース装置に記録し、端末装置等が取り付けられていない第2の移動物体による受信波形を得た場合は、該受信波形の第2の解析結果とデータベース装置に記録された第1の解析結果とを比較し、該当する結果を得た場合の端末装置の位置を第2の移動物体の位置として出力する。
(もっと読む)
ロバストなロケーション推定
位置の信頼できる推定を補足するために情報を収集する方法が提供される。方法は、第1の位置の信頼できる推定を導き出すのに十分な第1の情報を受信するステップと、第1の位置の付近の第2の位置の補足の推定が要求されうることを示す指示を受信するステップと、指示に応答して、第1の位置の付近の観測可能な少なくとも1つの地上無線ソースの識別を備える情報を検知することと、検知された情報を第1の位置に関連して格納するステップとを備える。方法は、第1の位置の信頼できる推定が、続いて少なくとも1つの無線ソースが観測可能である任意の前記第2の位置を推定するために使用されるようにすることができる。 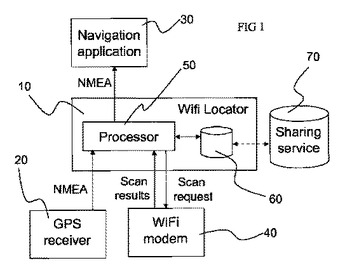 (もっと読む)
(もっと読む)
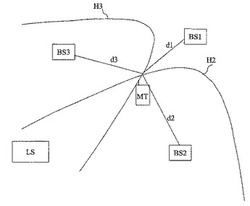
無線位置特定システム、アンテナ構成、およびアンテナ構成を決定する方法
第1の物体の第2の物体に対する相対位置を特定する無線位置特定システムは、第1の物体に動作可能に結合する第1の無線機を含むことができる。少なくとも高利得領域を有する第1の指向性アンテナは、高利得領域が第2の物体から全体的に外側に方向付けられ、かつ第1の検出範囲を定めるように、第2の物体に取り付けられる。少なくとも高利得領域を有する第2の指向性アンテナは、さらに第2の物体に取り付けられ、さらに高利得領域が全体的に外側に方向付けられ、かつ第2の検出範囲を定めるように方向付けられる。第1および第2の指向性アンテナに接続される第2の無線機は、第1の物体の第2の物体に対する相対位置を特定するために、少なくとも第1の無線機と無線信号を交換する。 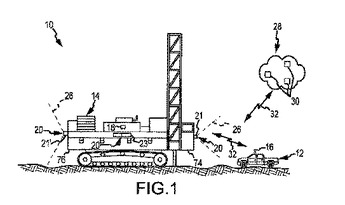 (もっと読む)
(もっと読む)
測位システムおよび測位基地局群
【課題】構造が簡単で設置コストを抑えることが可能な測位システム等を提供する。
【解決手段】測位システムにおいて、開始信号W1を無線発信する第1の基地局13;開始信号と要求信号とを受信して受信時刻を測定する受信測定部と、要求信号に応えて開始信号と要求信号の受信時刻を表した受信時刻信号を発信する受信時刻発信部と、所定の応答信号を発信し発信時刻を測定する応答部と、応答信号の発信時刻を表した発信時刻信号を発信する発信時刻発信部とを備えた第2の基地局12;および開始信号を受信して要求信号を発信し、開始信号の受信時刻と要求信号の発信時刻とを測定する要求発信部と、受信時刻信号および発信時刻信号を受信する時刻受信部と、応答信号の受信時刻を測定する応答測定部と、要求発信部と応答測定部で測定された時刻と時刻受信部で受信した信号が表した各時刻とに基づいて位置を計算する位置計算部とを備えた測位端末11;を備える。
(もっと読む)
無線システムにおけるジオフェンスの動的創出の方法
ジオフェンスデバイスによって受け取られた疑似距離測定値の第1の集合を使用して即時参照点を決定すること、即時参照点へ参照される動的ジオフェンス区域を規定すること、疑似距離測定値の第2の集合を使用して測位を決定すること、及び測位を動的ジオフェンス区域と比較することによって、動的ジオフェンス区域を創出する方法及び装置。1つの態様において、比較結果に基づく警報メッセージがユーザへ提示される。 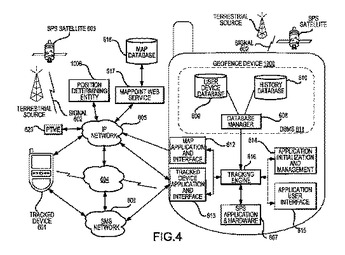 (もっと読む)
(もっと読む)
符号空間探索における多重相関処理
ワイヤレス通信デバイスにおける符号位相処理のための方法および装置について本明細書で説明する。ワイヤレスデバイスが、ワイヤレスチャネルを介して受信される擬似ランダム符号拡散信号に対して符号位相探索を実行する。相関器が、複数の周波数仮説の各々について受信信号を複数の符号位相と相関させる。相関結果から最大ピークおよび第2ピークを判断する。最大ピークに対して相互相関処理を実行し、相互相関の結果に基づいて、位置処理のために第2ピークのほうを優先して最大ピークを廃棄する。  (もっと読む)
(もっと読む)
測位システム、中継装置および測位装置
【課題】伝送効率を向上できる測位システムを得ること。
【解決手段】複数の探知情報に基づいて目標の測位を行う測位装置に対して探知情報を中継する中継装置を備えた測位システムにおいて、中継装置が、複数の探知情報を受信した場合に、2つの探知情報を単位とする全組合せについて、2つの探知情報を相対的にずらしながら比較し、情報パターンを抽出して保持する情報パターン比較部24と、2つの探知情報の情報パターンが保持されている場合に当該情報パターンを含ませた探知情報を生成し、一方、情報パターンが保持されていない場合は、2つの探知情報を用いて所定の符号化処理を行い、当該符号化結果を含ませた探知情報を生成する符号化部26と、2つの探知情報を単位とする全組合せについて、符号化部26にて生成された探知情報を送信する探知情報送信部27と、を備える。
(もっと読む)
着脱可能モジュールによって位置ベースのサービスをサポートするための方法および装置
着脱可能モジュールによって位置ベースのサービス(LBS)をサポートするための技術が記述される。着脱可能モジュールによって位置ベースのサービスをサポートするために、1セットのメッセージ(例えば、コマンドおよびイベント)が定義されることができる。1つの設計において、着脱可能モジュールは、位置情報を要求するために第1のメッセージ(例えば、位置取得要求メッセージ)を端末に送信することができる。第1のメッセージは、着脱可能モジュール上で作動するLBSアプリケーションのために送信されることができる。着脱可能モジュールは、その後、要求された位置情報を備える第2のメッセージ(例えば、位置取得応答メッセージ)を端末から受信することができる。着脱可能モジュールは、位置情報に基づいてLBSアプリケーションのためのタスクを実行することができる。当該タスクは、端末の位置を報告すること、音声コールを開始すること、SMSメッセージを送信すること、端末上にメニューを表示すること、端末の追跡のための報告を送信することなどを含むことができる。 (もっと読む)
検知システムおよび方法
【課題】電界強度レベルの変動に影響されること無く、送信端末の送信圏内にて受信端末が安定して送信端末を検知するための検知システムおよび方法を提供する。
【解決手段】任意の閾値を下回った場合、下限を任意の値に設定する。受信端末2で受信した電界強度の値が任意の閾値を下回った場合、任意の固定値として移動平均を計算する。また、任意の閾値を下回った場合、その前に取得したデータを適用する。受信端末2で受信した電界強度の値が任意の閾値を下回った場合、その前に受信した電界強度の値を適用し、移動平均を計算する。ただし、閾値を連続で下回る場合、任意の回数を超えた場合、任意の固定値とする。
(もっと読む)
同期通信システムのためのマルチセクター速度、モバイル速度及びドップラー推定のための装置及び方法
速度及びドップラー周波数を推定する装置及び方法は、第1の時刻に第1の複数の基地局から第1の複数の到達時間(TOA)メジャーメントを取得することと、第2及び第3の時刻に第2及び第3の複数の基地局から第2及び第3の複数の到達時間(TOA)メジャーメントを取得することと、前記第1、第2及び第3の複数のTOAメジャーメントを使用して、複数の視線距離メジャーメントを判定することと、前記複数のLOS距離メジャーメントを使用して、複数の速度推定及び複数の到来角(AOA)推定を判定することと、前記複数の速度推定及び前記複数のAOA推定を使用して、複数のドップラー周波数推定を判定することと、複数のセクターにわたって平均ドップラー周波数推定を判定するためにプロセッサを使用すること(前記第1、第2及び第3の複数のTOAメジャーメントは、前記複数のセクターにわたって得られる)を含む。  (もっと読む)
(もっと読む)
位置推定装置
【課題】自己位置の推定の際に使用する距離計測値の精度を向上した位置推定装置を提供する。
【解決手段】移動装置1に搭載して当該移動装置1周囲の障害物Sまでの距離を計測する距離計測装置6Aと、その距離計測装置6Aによる計測値に基づき上記移動装置1の位置を推定する位置推定手段6Eと、を備える。距離計測装置6Aによる計測結果のうち、距離測定時における移動装置1の姿勢に対してロバストな計測値を選択して、位置推定手段6Eで使用する計測値とする。
(もっと読む)
移動体位置推定方法及び移動体位置推定システム
【課題】設置センサ、移動体の位置情報を自動でキャリブレーションするだけでなく移動体のトラッキングも同時に行う。
【解決手段】測定領域内を移動する移動体Mの位置を推定する場合に、測定領域内のn箇所以上の地点の送信機T1〜Tnから移動体M(受信機R)までの距離を互いに時刻同期した状態で測定し、各測定地点から移動体Mまでの任意の測定時刻の距離データを受信機Rで取得し、位置推定装置Pにおいて、取得された任意の測定時刻の距離データから個々の測定地点及び移動体それぞれの位置を推定する。その際、移動体Mの移動前後の位置それぞれの3箇所以上の測定地点から得られる距離データを用いて、各測定地点の位置のキャリブレーション及び移動体Mの移動位置の推定を同時に行う。
(もっと読む)
3次元測位システム
【課題】単一の発信手段あるいは単一の発信手段から発信される無線信号を単一の受信手段で受信することによって、受信手段の3次元の位置を高精度で測位するシステムを安価に実現する。
【解決手段】アンテナ10a〜10dを周期的に切替えられながら、同期信号と距離測定信号を一組とする複数組の無線信号を放射する単一の発信手段2と、単一の受信手段6によって構成される。前記受信手段6において、前記アンテナ10a〜10dに対応して受信する複数組の無線信号から搬送波信号を再生して位相および位相差を測定して方向12を測定し、前記複数組の無線信号の内の同期信号を起点として距離測定信号の位相および位相差を測定して距離11を測定することによって高精度の3次元測位が実現できる。
(もっと読む)
測位システム
【課題】測位精度を簡素な手法により可変制御することで、制御の簡素化及び処理の迅速化を図る。
【解決手段】測位システム8は、移動局19と、基地局12A〜Dと、移動局10から送信され基地局12で受信した測距用電波信号に基づき、移動局10から基地局12までの測距処理を行う測位サーバ14とを有し、移動局10は、入力信号に基づき、送信する測距用電波信号に含まれる拡散符号の符号長を決定する符号長決定部35と、符号長決定手段35で決定された符号長の拡散符号を生成する拡散符号発生部38とを備え、基地局12は、移動局10の符号長決定部35で決定された符号長に応じ、当該符号長の拡散符号を用いて、受信した測距用電波信号を逆拡散する逆拡散処理部341を備える。
(もっと読む)
モバイル局に対して基地局アルマナックを提供すること
ここに開示された主題の事柄は、モバイル局で受信された階層基地局アルマナックに関する。 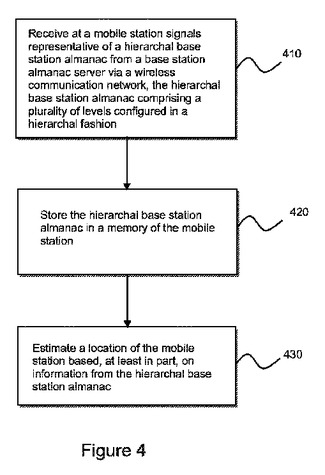 (もっと読む)
(もっと読む)
無線通信システムにおいて動作する装置の地理的位置情報の制御
【課題】無線通信システム多くのサービスプロバイダは、移動局を非常に狭い精度範囲内に位置を特定する能力を持つ。しかし、無線通信システムの一部のユーザは、自分の精密な位置に関する情報を他の当事者に知らせることに反対する可能性は高いため、個人のプライバシーの問題に対処しうる方法を提供する。
【解決手段】要求側エンティティに報告する地理的情報の精度を制御するための方法および装置が提示される。精密な地理的位置を使用して、調整された地理的位置を判断し、精密な地理的位置ではなく、これを要求側エンティティへ伝送する。
(もっと読む)
パッシブRFIDタグの三次元位置を高精度に計測する方法
【課題】
パッシブRFIDタグの3次元位置を高精度で測定する。
【解決手段】
質問器からの電波AとRFIDタグの応答電波Bの到達時間差から求まる距離と電波Aと電波Bの位相差から求まる1波長内の距離との合成から、質問器からの距離を求め、3台の質問器を使用する事で、3次元位置を高精度で計測すると共に、RFIDタグの特性の違いによる誤差を、個体情報としてRFIDタグに書き込み、補正情報として使用する事で、より高精度な測定結果を得る。
(もっと読む)
181 - 200 / 456
[ Back to top ]