
Fターム[5J062CC11]の内容
Fターム[5J062CC11]の下位に属するFターム
Fターム[5J062CC11]に分類される特許
361 - 380 / 456
屋内位置追跡方法及び屋内位置追跡システム

【課題】他のノードの位置を測定する際に、アンカーノードの位置情報の入力を省略する。
【解決手段】移動しつつ3つの仮想アンカー位置を設定し、3つの仮想アンカー位置に基づき相手端末機と近距離側位通信を行って相手端末機の位置を追跡する移動端末機210と、移動端末機210から近距離側位通信を通じて3つの仮想アンカー位置に対する位置情報を受信し、移動端末機210と近距離側位通信を行って移動端末機210との距離情報を送受信する近距離側位装置220とを含む。また、3つの仮想アンカー位置は、GPS衛星から受信するGPS位置情報やPNS機能により特定する。
(もっと読む)
位置判定システム及びその制御方法

【課題】 複数の監視対象の位置を同時に判定し、監視対象領域を自由に指定し、出入り口が存在しない場合でも適用可能で、高精度で位置を判定可能な位置判定システム等を提供する。
【解決手段】 監視対象に各々取り付けられ、あるいは、携帯されて、インパルス状の電波を出力する送信器5、6、7と、送信器5、6、7から出力された電波を受信する複数の受信器8、9と、複数の受信器8、9に各々信号伝送特性が等しいケーブル12、13を介して接続され、ケーブル12、13を介して伝送された複数の受信器8、9の出力信号に基づいて、送信器5、6、7が監視対象空間A内のいずれの位置に存在するかを判別する位置判定装置10とを備える位置判定システム。位置判定装置10は、監視対象空間Aを複数の空間A1、A2に分割し、各空間毎に送信器が当該空間内に存在するか、当該空間外に存在するかを判別できる。
(もっと読む)
無線基地局に関する動的位置アルマナック
【課題】無線基地局に関する動的位置アルマナック
【解決手段】エンドユーザーによって制御される無線電話によって基地局のアルマナックを動的に更新するシステム及び方法。第1、第2、及び第3の位置情報が、第1、第2、及び第3の無線電話からそれぞれ受信される。各無線デバイスの位置が知られる。不確実性係数を考慮しつつ各無線デバイスと非協力基地局との間の距離が決定される。前記非協力基地局の位置が、前記第1、第2、及び第3の位置情報及び前記距離を用いて計算される。前記アルマナックは、前記位置を用いて更新される。
(もっと読む)
多用途位置検出・通信・医療・制御システム
有線及び/又は無線システム用のRFID及び/又はバーコードリーダを含む、多機能、多モード、相互接続可能なシステム動作についての多用途位置検出器、通信、医療及び制御システムが開示される。新規な対象は、ユニバーサルリモコン(URC)、無線、有線、ケーブル、インターネット、ウェブ型通信システム、通信及び放送装置、緊急又は他の警告通信システム、医療患者監視センサ装置、DNA用の診断通信システム、無線心刺激、及び心臓ペースメーカのパラメータの磁気検出又は磁気制御のない通信/制御装置、指紋識別、単一又は複数の通信で使用される指紋及び制御システム、放送、情報通信、及び遠隔測定システムを含む。相互接続可能な多標準システム(例えば、GSM、GPRS、EDGE又はE-GSM、CDMA、WCDMA又はW-CDMA、OFDM、TDMA、IEEE802.xx、DECT、IR、Wi-Fi、Bluetooth及び他の標準並びに非標準システム)での動作について、1つ以上の組み合わせ及び変形で構成される多用途システム構成要素が開示される。この出願は、2G、3G、4G及び5G並びに他の新世代の無線及び放送、処理、格納、医療診断通信、制御、インタラクティブ娯楽、教育及び企業システムと相互接続可能な拡張した性能の効率的な相互相関の直交変調及び極性非直交変調の実装の実施形態及びアーキテクチャを含む。  (もっと読む)
(もっと読む)
位置検出システム
【課題】検出対象ごとの移動の履歴の分析を容易にするとともに情報の秘匿性を高めた位置検出システムを提供する。
【解決手段】送信装置1は定位置に固定され疎密波を間欠的に送波する疎密波送波部11と、赤外線を伝送媒体とするワイヤレス信号により識別データを送信する識別データ送信部12とを備える。受信装置2は、移動体のような位置検出の検出対象に搭載され、疎密波を受波することにより受信装置2の位置を記憶部26に格納する。受信装置2は、検出対象を特定する固有情報を入力する固有情報入力部28と、制御部20で求めた送信装置1の位置の履歴と固有情報入力部28から入力した固有情報とを記憶する記憶部27と、記憶部27に格納した記憶内容を非無線の伝送経路で取り出すインターフェイス26とを備える。
(もっと読む)
移動通信システム、基地局制御装置及びそれらに用いるソフトハンドオーバ方法並びにそのプログラム
【課題】 移動機の複雑化・高消費電力化を防ぎ、移動機の小型化・経済化を実現可能な移動通信システムを提供する。
【解決手段】 基地局制御装置は移動機の位置検出技術を利用して移動機の位置検出を行い(a1)、移動機の位置が非ソフトハンドオーバエリアか、ソフトハンドオーバエリアかを判定する(a2)。基地局制御装置はその判定結果に基づいて、ソフトハンドオーバを行うアクティブセットの更新を行う(a3)。基地局制御装置はアクティブセットの更新結果を基地局及び移動機に通知し(a4,a5)、基地局及び移動機は実際にブランチの追加・削除を行う(a6,a7)。
(もっと読む)
携帯端末
【課題】通信により移動速度を算出する携帯端末を提案する。
【解決手段】複数の相関演算系を含む受信系と、各相関演算系に接続された中央処理装置を備え、受信系により複数のGPS衛星または符号分割多元接続方式の通信基地局からの電波を受信する機能を有する携帯端末であって、各相関演算系を用いて、時系列に複数回に亘りGPS衛星または通信基地局に対する測位動作を行ない、この測位動作に基づく測位履歴データを記憶し、中央処理装置が、測位履歴データに基づいて、携帯端末の移動速度を求める。
(もっと読む)
位置認識マルチモーダルマルチ言語デバイス
位置ベースの技術(たとえば全地球測位システム(GPS))を使用して、マルチモーダル、マルチ言語の、位置ベースサービスの提供を容易にすることができる。位置の識別により、ユーザの状態および意図の識別に関して重要なコンテキストを提供することができる。したがって、位置識別は、データおよびサービスの提供/増補(たとえば、位置認識ベースの提案、位置に基づいた連絡先リストの切り捨て、ユーザが所定の位置に近づいた際の位置ベースの注意喚起、事前にロードされたタスクの切り捨て、PIM内に事前にロードされたタスクを実施するためのルートの提案)を容易にすることができる。さらに他の態様は、方位磁石、加速度計、方位角制御、セルラ式三角測量、電話のSPOTサービスなどを使用して、GPS位置識別を増補することができる。事実上、これらの代替諸態様では、ユーザおよび/またはポータブルデバイスの動きおよび方向を検出することによって、ターゲット位置の特定を容易にすることができる。 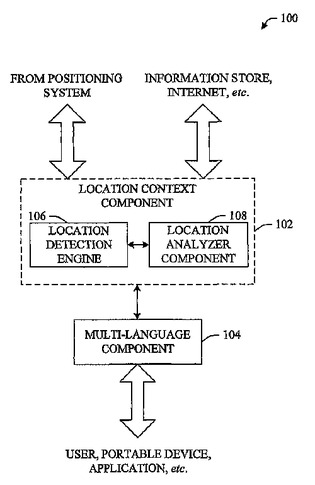 (もっと読む)
(もっと読む)
測位システム、端末装置、端末装置の制御方法、端末装置の制御プログラム、端末装置の制御プログラムを記録したコンピュータ読み取り可能な記録媒体
【課題】端末装置の移動状態に対応する精度の高い測位位置を選択することができる測位システム等を提供すること。
【解決手段】端末装置40は、各現在位置情報256を生成したときの衛星信号S1等に基づいて、測位ベクトル情報258を生成する測位ベクトル情報生成手段と、ドップラー偏移情報264及び送信周波数情報254に基づいて、移動速度情報266を生成する移動速度情報生成手段と、送信方向情報260と移動速度情報266に基づいて、速度ベクトル情報268を生成する速度ベクトル情報生成手段と、複数の速度ベクトル情報268に基づいて、端末装置40の移動方向及び移動速度を示す合成ベクトル情報270を生成する合成ベクトル情報生成手段と、測位ベクトル情報258と合成ベクトル情報270に基づいて、複数の現在位置情報256から予め規定した基準を満たす現在位置情報256を選択する現在位置情報選択手段等を有する。
(もっと読む)
電波監視装置
【課題】電波発射源から発射される電波の実効輻射電力を検知できる電波監視装置を提供すること。
【解決手段】電波発射源Tから発射された電波を受信する電波受信部11と、この電波受信部11で受信した受信信号をデジタル化して受信データに変換する変換部12R、121〜12Nと、この変換部12R、121〜12Nで変換した受信データを処理して電波発射源Tの距離を求め、この求めた距離情報を用いて得られた電波減衰量および受信信号の受信電力、電波受信部11のアンテナ利得をもとに、電波発射源Tの実効輻射電力を求める信号処理部15とを具備している。
(もっと読む)
変位計測システム及び変位計測方法
【課題】低コストの発信機を用いて高い計測精度を確保でき、かつ特定の基準発信機に計測精度が依存することなく、長期間安定して高い計測精度が得られる変位計測システム及び変位計測方法を得る。
【解決手段】斜面の変位計測点に設置され、それぞれ異なる連続波電波を発信する複数の発信機3と、位置が既知の固定点に設置され、前記連続波電波を受信する複数の受信センサ4と、発信機毎に分離された各受信センサの受信信号に基づいて、全ての発信機及び全ての受信センサの組み合わせ毎に受信位相を算出し、前記全ての発信機の位置、前記全ての発信機の発信位相、及び全ての受信系の遅延位相量を未知変数とする、前記受信位相の算出式の連立方程式を解くことにより各発信機の位置の変位を求める信号処理ユニット5とを設けた。
(もっと読む)
測位システム、測位装置、端末装置、仲介装置、測位装置の制御プログラム
【課題】端末装置が発信する通信電波の障害を受けることなく端末装置の現在位置を測位することができる測位システム等を提供すること。
【解決手段】測位装置40は、端末情報送信時刻情報366、仲介情報受信時刻情報368、及び、仲介装置情報取得手段によって取得した仲介情報伝搬遅延情報356に基づいて、端末情報が各仲介装置20A等に伝搬するために必要な時間を示す端末仲介装置間伝搬遅延情報370を生成する端末仲介装置間伝搬遅延情報生成手段と、仲介装置位置情報354と端末仲介装置間伝搬遅延情報370に基づいて、端末装置12の位置を示す端末装置位置情報372を生成する端末装置位置情報生成手段等を有する。
(もっと読む)
位置標定可用性を増加させるための手続
位置決定を行うために使用される方法論を所望の測位精度を達成することに関連して動的に変化させることを可能にする装置、方法およびシステムが提供される。 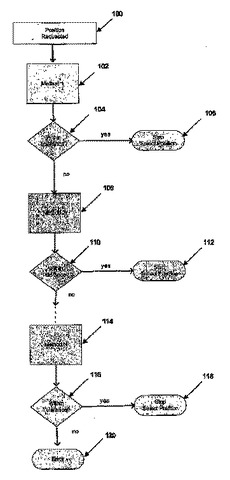 (もっと読む)
(もっと読む)
無線通信システムにおいて、デバイスの位置決めに用いられるナビゲーション解を選択すること
【解決手段】無線通信システムでは、移動局の位置決めのために異なる種類の位置決め解が使用されうる。この位置決め解は、地上ベースすなわちネットワークベースの技術と、例えば衛星のような非ネットワークベースの技術を含む。移動局ユニットの位置決めを行う際に、異なる位置決め解による装置及び方法が、異なる解の良度示数に基づいて選択される。 (もっと読む)
無線通信システム、ノード位置算出方法及びノード
【課題】適切な測位方法を用いてノードを測位する無線通信システムを提供する。
【解決手段】互いに通信する複数のノードと、前記ノード間の通信を用いて前記ノードを測位するサーバと、を備える無線通信システムにおいて、前記ノードは、電力を供給するバッテリを有し、前記バッテリの状態を測定し、前記測定したバッテリの状態をサーバに通知し、前記サーバは、前記ノードから通知されたバッテリの状態に基づいて、当該ノードの測位方法を決定し、前記決定した測位方法によって、当該ノードの位置を算出することを特徴とする。
(もっと読む)
無線通信システムおよび携帯端末
【課題】 データ通信中でも位置測位を行うことができる携帯端末を提供する。
【解決手段】 ナビゲーションの開始後、GPS部14は、GPSアンテナ13を介して複数のGPS衛星からGPS信号を受信し、受信したGPS信号に基づいて、現在位置を検出する。着信があった場合、制御部16は、切替スイッチ15に対して、複数の基地局から受信した信号に基づく測位への切替を指示する。指示を受けた切替スイッチ15は、位置測位用および音声通信用の受信データが移動体通信部12から出力された場合に、その受信データを制御部16へ出力し、位置測位用および音声通信用の送信データが制御部16から出力された場合に、その送信データを移動体通信部12へ出力する。
(もっと読む)
物体を追跡するための無線システム
物体に接続可能なトランスポンダ装置(12)を備えた、位置を求めるために空間において物体を追跡するためのシステム(10)である。前記トランスポンダ装置(12)は、一又は数個のトランスポンダアンテナ(20)、ならびに、それを介して無線信号を受信するためトランスポンダアンテナ(20)に接続されたトランスポンダ回路(21)を有している。当該トランスポンダ装置(12)は、無線信号に対して既知の遅延を加算し、これにより、トランスポンダアンテナ(20)を介して送信するための無線応答を生成する。送信器(42)は、それを介して無線信号を送信するための第一アンテナ(43)に接続されている。受信器(42)は、それを介してトランスポンダ装置(12)の無線応答を受信するため、第一、第二ならびに第三アンテナ(43、44、45)に接続されている。位置算出器(46)は、物体の位置を、既知の遅延に応じ、ならびに、第一、第二、第三アンテナ(43、44、45)からの無線信号の発信から受信までの時間として算出するため、送信器(42)および受信器(42)に関連づけられている。また、方法も提供される。 (もっと読む)
人物を位置特定する方法および装置
本発明は、動員時に被監視領域内の人員を位置特定する方法および装置に関する。この場合、超広帯域(UWB)で動作する少なくとも1つの送信機(2)と、超広帯域(UWB)で動作する少なくとも1つの送受信機(トランシーバ3)と、超広帯域(UWB)で動作する受信機が使用される。送信機(2)は動員中、被監視領域内に位置固定されて配置され、送受信機(3)は位置特定すべき人員に取り付けられ、受信機(4)は被監視領域外に設けられた監視用コンピュータ(指令センタ)に配置されてこの監視用コンピュータと接続される。 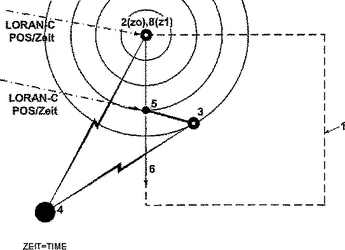 (もっと読む)
(もっと読む)
位置推定装置および位置推定方法
【課題】 情報を有効に利用しつつ、他のデバイス情報を用いることなく、実際の状態との整合率の高い位置推定手段を提供する。
【解決手段】 位置推定装置10は、情報取得部12、情報記憶部18、演算処理部20を備える。情報取得部12は、情報から移動体の位置情報を取得する位置情報取得部14と、誤差情報を取得する誤差情報取得部16とを備える。情報記憶部18は、位置情報取得部12から送られた位置情報と誤差情報をその測定時刻ごとに記憶する。演算処理部20は、位置情報取得部12からの位置情報と誤差情報とから位置を推定する。移動体の単位時間あたりの移動エリアを推定する第1ステップと、移動体の現在における存在エリアを推定する第2ステップ、移動体の現在における位置を推定する第3ステップが、位置推定装置の演算処理部20によって順次行われて移動体の位置を推定する。
(もっと読む)
携帯端末装置、応答通信装置並びに被探索対象表示システム及び方法
【課題】被探索対象位置測定装置と撮影装置とを兼備し、ディスプレイ上に撮影した画像と被探索対象を示すポインタとをオーバーラップ表示できるシステム、方法等を提供すること。
【解決手段】携帯端末装置は、ディスプレイ;ディスプレイ上に映し出す映像を撮影する撮影手段;被探索対象からの応答信号の到来方向及び距離を測定する被探索対象位置測定手段;及び撮影手段で撮影した映像をディスプレイ上に表示させ、被探索対象がディスプレイ上に表示された映像の範囲内にあるか否かを判定し、範囲内にあると判定された場合に映像と被探索対象を示すポインタとをオーバーラップさせてディスプレイ上に表示させる表示制御手段;から構成される。
(もっと読む)
361 - 380 / 456
[ Back to top ]