
Fターム[5J062FF02]の内容
Fターム[5J062FF02]に分類される特許
201 - 220 / 221
後処理を用いたロケーションタギング
イベントに応じてGPS信号から受信された位置データを格納し、さらに、後でこの位置データを処理して、イベントの時点におけるシステムの詳細なロケーション情報を取得するためのシステムが提供される。受信されたGPS信号は、所望のサンプリングレートにデシメートされ、さらに、後の相関のために格納されてもよい。一実施形態において、システムは、アンテナ、RFフロントエンドおよび不揮発性メモリ装置を有するデジタルカメラである。位置データの記憶をトリガするイベントは、デジタルカメラによる写真撮影である。デシメートされているが無相関の形態である位置データは、画像データと共に不揮発性メモリ装置に格納される。次に、位置データは、後処理のために、パーソナルコンピュータなどの別個の装置に、画像データと共に転送することができる。  (もっと読む)
(もっと読む)
追跡環境内において対象の位置を検出しイベント通知を発生する方法及びシステム並びにこれに用いるバッジ
【課題】
【解決手段】電磁スペクトルの無線周波数(RF)と赤外線(IR)部分の双方を用いて追跡環境内で対象(すなわち物又は人物)の位置を検出するのに用いる方法、システム及びバッジである。本システムは位置検出すべき対象用のバッテリ駆動するマイクロプロセッサ搭載のバッジを備える。各バッジは、(1)間隔が短くデジタル化した赤外線の光信号で範囲エリアを特定して対象の位置を特定する;(2)間隔が短くデジタル化した低出力のRF信号で対象の位置の狭域ゾーンを把握する;(3)間隔が長くデジタル化した高出力のRF信号で対象の位置の広域ゾーンを把握する。各バッジは、バッジに設けられた1以上の押しボタンスイッチが動作又は1以上の外部スイッチコネクタの状態が変化すると、固有の識別可能なIRと高出力RF信号とを発信する。高出力で間隔の長いRF信号は“管理用”パルスとなる。このパルスはホストコンピュータにRF受信器の受信範囲内にあり機能していることを伝達する。 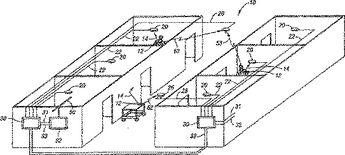 (もっと読む)
(もっと読む)
電波及び光方式3次元測位システム
電波及び光方式3次元測位システム(10)が開示されている。このシステムは、据え置き型で一体型の自己位置測位電波送受信機/レーザ送信機(RTR_LT)(12)と、可搬型で一体型の電波受信機/レーザ検出器(RR_LD)(14)とを備えている。RTR_LT(12)は、第1の複数の外部電波信号を受信し、受信した第1の複数の外部電波信号に基づいて自身の位置座標を決定し、少なくとも1つの内部電波信号を発信し、かつ少なくとも1本のレーザビームを発信するように構成されている。RR_LD(14)は、第2の複数の外部電波信号を受信し、RTR_LT(12)が発信する少なくとも1つの内部電波信号を受信し、RTR_LT(12)が生成する少なくとも1本のレーザビームを検出し、受信した第2の複数の外部電波信号、受信した少なくとも1つの内部電波信号、及び検出した少なくとも1本のレーザビームから成る群から選択された1組のデータに基づいて、自身の3次元位置座標を決定するように構成されている。 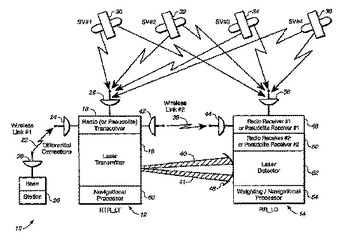 (もっと読む)
(もっと読む)
無人搬送車の誘導装置
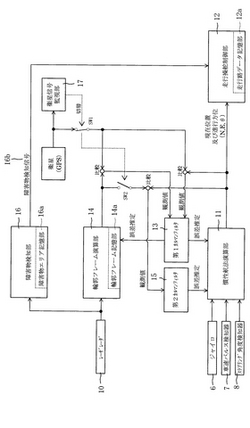
【課題】 走行路の誘導標識体を不要として走行路の工事費用を縮小すると共に、車輌コストを低減することができる無人搬送車の誘導装置を提供すること。
【解決手段】 屋外の見晴らしの良い走行路では、GPS信号および第1カルマンフィルタ13に基づいて、慣性航法演算部11で算出された無人搬送車1の位置及び方位(N,E,θ)の誤差を補正し、一方、屋内あるいは遮蔽物などによりGPS信号が切れた場合には、レーザレーダ10および第2カルマンフィルタ15により、無人搬送車1の位置及び方位(N,E,θ)の誤差を補正する。これにより、屋外および屋内を問わず如何なる場所においても、走行路に誘導標識体を必要とせずに、精度良く無人搬送車1を誘導することができる。
(もっと読む)
航空機位置検知装置及びその方法

【課題】安価な装置で確実に航空機の位置を検知できる航空機位置検知装置を提供することにある。
【解決手段】GPS信号を受信するアンテナ10と、GPS信号の受信強度に基づいて移動体の存在を検知する移動体有無検知部7と、移動体から発せられる振動を検知する振動センサ13と、振動信号に基づいて移動体が航空機であると判定する移動体種別判定部9を備える。
(もっと読む)
カメラの位置及び姿勢情報補正方法及びその装置
【課題】カメラに装着された3ラインスキャナーを介して得られる画像情報を分析し、カメラの位置と姿勢情報とを精密に補正できるようにする方法及び装置を提供すること。
【解決手段】衛星航法装置を用いてカメラの位置を計算するステップと、慣性航法装置を用いてカメラの姿勢を計算するステップと、カメラに装着された3ラインスキャナーを介して入力される画像を分析し、カメラの位置及び姿勢補正情報を生成するステップと、生成された位置及び姿勢補正情報をそれぞれ衛星航法装置と慣性航法装置とにフィードバックするステップとを有する。3ラインスキャナーを介して入力される画像は、前方スキャナー観測画像、直下スキャナー観測画像及び後方スキャナー観測画像とから構成される。人工衛星や航空機、車両などの輸送手段に搭載されたカメラを介して観測された画像に対し、地上基準点を使用しなくともカメラの外部標定要素を精密に決めることができる。
(もっと読む)
航法装置、航法システム、航法測位方法、および車両
【課題】 搬送波差分型全地球測位システム(GPS)受信機とレーザスキャナを有する自律陸上用車両(AGV)のための水平航法システムを提供する。高精度の車両航法システムは先進AGVに強く求められている。高性能のRTK−GPS受信機によっても高い測位精度は得られるが、高い建物やその他の障害物により遮蔽された環境下では、その性能は著しく低下する。
【解決手段】 本発明の航法システムによれば、こうした苛酷な環境下であっても、正確なGPS測位に必要なデシメートルレベルの測位精度が得られる。水平航法システムは低価格の光ファイバージャイロ(FOG)と精密なオドメータから成る。航法誤差は密結合の拡張カルマンフィルタ(EKF)を使用して推定する。EKFの測定値としては二周波数GPS受信機からの二重差分型符号と搬送波位相及びレーザスキャナ測定から生じる相対位置がある。
(もっと読む)
波源探索装置および波源探索方法
【課題】探索作業者に探索対象の位置を示す明確な指標を与えることが可能な波源探索装置およびこの波源探索装置を用い、監視対象の地域を自由に変更することが可能な波源探索方法を提供する。
【解決手段】波動信号を受信するアンテナと、アンテナに到来した波動信号の波源の方向を示す情報を含む位置推定情報を出力する観測手段と、観測手段によって得られた位置推定情報に基づいて、波源の位置を示す目視可能な指標を提供する指標提供手段とを備えて波源探索装置を構成する。このような波源探索装置を移動体に搭載し、観測指示に応じて、波源探索装置に備えられた観測手段による観測動作を実行させる観測実行ステップと、得られた観測結果に対応して、波源探索装置に備えられた指標提供手段によって波動信号の波源の位置に関する指標を移動体の操縦者に提供することにより、移動体を進めるべき針路を決定する作業を支援する針路決定支援ステップとを備えて波源探索方法を構成する。
(もっと読む)
距離計測システム及び、計測方向制御方法
【課題】 測定対象物に向ける計測方向を自動制御することのできる距離計測システム等を提供する。
【解決手段】 移動無線機10が測定点に配置された状態で、固定無線機20(20a,20b)は、無線通信により、移動無線機10との距離を算定する。制御コンソール30は、算定された距離(距離データ)を固定無線機20(20a,20b)から取得すると、この距離データ及び、固定無線機20(20a,20b)の位置等から、移動無線機10の位置を特定する。そして、制御コンソール30は、特定した移動無線機10の位置に基づいて、基準線を基準とした移動無線機10までの角度を求め、この角度情報を光波距離測定機40に供給することで、移動無線機10の位置に、計測方向が向くように、光波距離測定機40を回動制御する。
(もっと読む)
移動体検出システム、及び、移動体検出プログラム
【課題】それ自身では位置精度が十分ではない無線タグを用いながら、位置検出の精度をはるかに向上させるようにした移動体検出システムを提供する。
【解決手段】移動体10に装着され、移動体10の停止(又は動き始め)を検出するセンサ11(11b)と、移動体10に装着され、移動体10から識別コードを送信する無線タグ12と、移動体10の動画像を撮像する撮像手段20とを備えてなる移動体検出システム1a(1b)であって、前記センサ11(11b)によって移動体10の停止(又は移動体10の動き始め)が検出された場合、前記撮像手段によって撮像された停止前(又は動き始め前)の画像と停止後(又は動き始め後)の画像を抽出し、これら前後の画像の差分をとって移動体10の位置を検出する。そして、無線タグ12から送信されてきた識別コードとともに何がどこに存在するかを報知可能に出力する。
(もっと読む)
カーナビゲーション装置及びカーナビゲーション装置に用いられるダウンコンバータIC
【課題】従来のGPSとVICSを統合して回路規模は縮小可能であるが、カーナビゲーション装置全体として省電力化に関しては、十分改善されておらず、回路を統合しても省電力化が困難であった。
【解決手段】カーナビゲーション装置は、GPS/VICS統合アンテナ1に接続されたダウンコンバータIC50と、光アンテナ2に接続された光送受信部17と、路上機の座標情報が予め記憶された座標情報メモリ21と、制御部20を含んでいる。さらにダウンコンバータIC50はGPS/VICS切替器6を有し、制御部20により信号を切替え、同時使用を避けることにより消費電力を低減させる。
(もっと読む)
カーナビゲーション装置及びカーナビゲーション装置に用いられるダウンコンバータIC
【課題】従来のGPSとVICSを統合して回路規模は縮小可能であるが、カーナビゲーション装置全体として省電力化に関しては、十分改善されておらず、回路を統合しても省電力化が困難であった。
【解決手段】カーナビゲーション装置は、GPS/VICS統合アンテナ1に接続されたダウンコンバータIC50と、光アンテナ2に接続された光送受信部17と、制御部20と、カーナビゲーション制御部30を含んでいる。さらにダウンコンバータIC50はGPS/VICS切替器6を有し、カーナビゲーション制御部30が渋滞を検知すると制御部20により信号を切替え、同時使用を避けると共に状況に応じて同時停止とすることで消費電力を低減させる。
(もっと読む)
アクテイブタグ装置
【目的】この発明は、発信手段と受信手段の何れか一方あるいは両方に複数のアンテナを接続し、当該発信手段から発信される高周波信号を当該受信手段が受信中に当該複数のアンテナを切替えあるいは組合わせを変えた時に、当該受信手段が受信する高周波信号のタイミングあるいは振幅あるいは周波数あるいは位相あるいはこれらの組合わせの変化をリアルタイムで検知することによって、当該発信手段が位置する方向および当該発信手段と受信手段の距離を精度良く検知できるアクテイブタグ装置に関するものである。
【構成】発信手段1の指向性アンテナの方向31に対向して受信手段2の指向性アンテナ21aと21bを向け、発信手段1が高周波信号を発信中に指向性アンテナ21aと21bを切替えた時に受信した高周波信号のタイミングあるいは振幅あるいは周波数あるいは位相あるいはこれらの組合わせの変化をリアルタイムで検知し、当該発信手段1が位置する方向を検知し当該発信手段と受信手段の距離を検知する。
(もっと読む)
障害物検出装置、車両
【課題】 自車両に対する障害物の位置関係を特定して運転者等に警報を提示する。
【解決手段】 障害物検出装置は、自車両1の周囲の障害物を検出するために、それぞれが異なる箇所に設置され、携帯端末2から発信された無線電波を受信アンテナ1a,1b,1cで受信し、無線電波間の位相差を電波位相比較回路12で算出し、当該位相比較結果から自車両1に対する携帯端末2の位置関係を計算機13で特定すると、特定された自車両1に対する携帯端末2の位置関係に基づいて、自車両1にとって障害物となる携帯端末2を検出して、警報表示部14で報知する。
(もっと読む)
測位情報装置及びダウンコンバータIC
【課題】従来のGPSとVICSを統合して回路規模は縮小可能であるが、カーナビゲーション装置として大切な測位精度の向上に関しては、改善されておらず、回路を統合してもGPSの測位性能を向上させることができない。
【解決手段】測位情報装置は、GPS/VICS統合アンテナ1に接続されたダウンコンバータIC50と、光アンテナ2に接続された光送受信部17と、路上機の座標情報が予め記憶された座標情報メモリ21と、制御部20を備えている。さらにダウンコンバータIC50はGPS/VICS切替器6を有し、制御部20により信号を切替え、VICS情報によりGPSの測位精度を向上させる。
(もっと読む)
情報処理システム、携帯端末およびプログラム
【課題】従来の情報端末の位置特定方法では、機器構成が複雑である。
【解決手段】2以上の位置情報送信装置と、携帯端末を有する情報処理システムであって、位置情報送信装置は、当該位置情報送信装置の位置を示す情報である位置情報を保持している位置情報保持部と、位置情報を送信する位置情報送信部を具備し、2以上の位置情報送信装置の位置情報送信部は、異なるタイミングで、順次、かつ繰り返し位置情報を送信し、携帯端末は、1以上の位置情報送信装置から、順次、1以上の位置情報を受信する位置情報受信部と、位置情報受信部が受信した1以上の位置情報に基づいて、当該携帯端末が存在する領域を決定する領域決定部と、領域に基づいて情報を出力する情報出力部を具備する情報処理システムであり、かかる構成により、簡易な構成で、ユーザが居る領域に適した情報を、ユーザは得ることができる。
(もっと読む)
タグ通信装置、タグ通信装置の制御方法、タグ通信制御プログラム、および、タグ通信管理システム。
【課題】 電波を介してRFIDタグと無線通信を行うタグ通信装置において、簡単な構成により、各RFIDタグの位置を特定することが可能なタグ通信装置を提供する。
【解決手段】 方向推定部11が、各アンテナ3におけるRFIDタグ1からの電波の到来方向を推定する。位置算出部14は、方向推定部11において推定された到来方向に基づいて、該RFIDタグ1の位置を算出する。
(もっと読む)
位置検出システム
【課題】 屋内において無線送信機を装着した管理対象の人物、物品の存在位置を個品、個人を識別した上で把握するとともに、位置検出の不感地帯を少なくする。
【解決手段】 位置検出対象には、所定の周波数の電波を変調して、固有の識別信号を有する無線信号を発信する無線発信部と、赤外線を発光する赤外線発光部を持つ送信機30が装着されている。無線基地局11〜13は既知の位置に設置され前記送信された電波を受信し、受信された電波の受信電界強度を測定し、該受信された電波から固有の識別信号を識別する。赤外線受光局21、22は送信局30から発せられた赤外線を受光する。無線位置管理装置50は無線受信局11〜13から受信した電界強度を基に送信局30の位置を求め、赤外線位置管理装置40は赤外線受光局21、22で撮影された画像から送信局30の位置を求める。送信局位置管理装置60は両位置から送信局30の最終的な位置を把握する。
(もっと読む)
デジタル写真に地理的位置データを記述したタグを付けるための方法および装置
デジタル写真に地理的位置データを記述したタグを付けるための方法およびカメラに関する。このカメラは、撮像ユニット、無線周波数/中間周波数(RF/IF)フロントエンドおよびメモリを含む。撮像ユニットは、デジタル写真を生成するように構成される。RF/IFフロントエンドは、衛星測位システム信号を受信し、その信号からデジタルサンプルを生成するように構成される。メモリは、RF/IFフロントエンドによって生成された一組のデジタルサンプルを、撮像ユニットによって生成されたそれぞれのデジタル写真とともに記憶するように構成される。RF/IFフロントエンドによって生成されたデジタルサンプルは、中間周波数サンプルであってもよく、同相サンプルおよび直交サンプルの両方を含んでもよい。特に、メモリは、位置データではなく、GPS信号のデジタルサンプルを記憶する。 (もっと読む)
位置特定システム
受信機から送信機までの距離を正確に知る必要なく該送信機の位置特定(近似)を可能とするシステム及び方法である。正確な距離計算なしで送信機の位置を特定する方法である。一実施形態では、受信機に付いて、第1送信機が内部に位置している第1領域を推定する段階と、所与の送信機を受信可能な残りの受信機に付いて、それぞれが、第1送信機が内部に位置している第2領域を推定する段階と、これら領域の何れかに重複部分があるかどうかを特定する段階とを備えた方法が開示されている。別の実施形態では、送信機の位置が推定される範囲である潜在的な標的区域が画定される。  (もっと読む)
(もっと読む)
201 - 220 / 221
[ Back to top ]