
Fターム[5J070AC01]の内容
レーダ方式及びその細部 (42,132) | 測定量 (6,664) | 位置 (1,245)
Fターム[5J070AC01]に分類される特許
1,201 - 1,220 / 1,245
探索システム、探索対象端末、探索端末、探索方法、探索端末の制御方法、探索端末の制御プログラム及び探索端末の制御プログラムを格納したコンピュータ読み取り可能な記録媒体
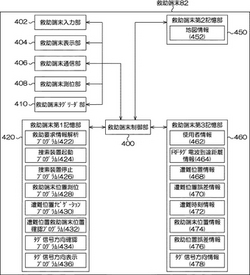
【課題】探索対象者の位置を迅速に、かつ、精度良く把握することができる探索システム等を提供すること。
【解決手段】探索対象端末20は、位置情報衛星からの位置関連信号に基づいて現在位置を測位して探索対象端末の現在位置を示す探索対象位置情報を生成する探索対象位置情報生成手段と、励振信号に対応する応答信号を送信する応答信号送信手段等を有し、探索端末82は、探索対象位置情報に示される探索対象端末20の現在位置と探索端末位置情報に示される探索端末82の現在位置を比較する位置比較手段と、位置比較手段の比較結果に基づいて、探索対象端末20に対して励振信号を送信する励振信号送信手段と、探索対象端末20から励振信号に対応する応答信号を受信する応答信号受信手段と、応答信号の方向を特定する応答信号方向特定手段等を有する。
(もっと読む)
自動洗浄装置
【課題】 前洗浄で使用する洗浄水を尿流洗浄のために使用して、最適な洗浄水量を供給できる自動洗浄装置を提供する。
【解決手段】
小便器内の尿流を検知する検知手段と該検知手段から出力された尿流信号に基づき便器洗浄時間を決定し、且つ便器洗浄を行うためのバルブの開閉制御を行う制御手段とを備え、前記制御手段は、前記検知手段によって尿流検知を開始した後に便器の前洗浄を行なう前洗浄機能と、前記検知手段によって尿流検知を終了した後に便器の本洗浄を行なう本洗浄機能とを有し、前洗浄を行った際の本洗浄時間が、前記尿流信号の検知時間、または、前記尿流信号の検知時間および小便器使用者の使用間隔に基づき設定される所定の洗浄時間よりも短く設定されることを特徴とする。
(もっと読む)
車載用レーダ軸ずれ判定方法

【課題】 車載用レーダに関し、特に静止物を用いた車載用レーダ装置の軸ずれの誤判定を防止する軸ずれ判定方法を提供する。
【解決手段】 静止物分布からレーダの軸ずれ量を判定する際に、静止物分布に軸ずれ量の演算を間違う要素を検出したときは、その軸ずれ量の演算をキャンセルすることから成る。
(もっと読む)
位置検出システム並びに、そのシステムで用いられるフロアパネル
【課題】 システムコストの低廉、アクティブタグの電力供給問題の解決、スチール系パネルの下にある配線等の位置検出を可能にする。
【解決手段】
什器3に付され、IDを含む信号W2を送信する資産タグ4a、4bと、所定の位置に固定され、IDを含む信号W1を送信する複数のリファレンスタグ2a〜2cと、信号W1、W2が受信可能であり、リファレンスタグ2a〜2cについては、何れか一つのタグの信号を受信する際、他のタグの信号を受信しないよう、その検知範囲A1が調整され、リファレンスタグ2の信号W1の受信と同時期に資産タグ4の信号を受信した場合、当該リファレンスタグ2a〜2cのIDに、その資産タグ4a、4bのIDを関連づけて記憶するリーダー装置5を備え、リファレンスタグ2は、フロアパネル1(1a〜1c)に付され、かつフロアパネル1の商品情報を格納する。
(もっと読む)
中継方式障害物検出システムおよび方法
【課題】 コストを抑えて通信経路網を増やすことにより解像度を高めたり検出範囲を拡大することが可能な障害物検出システムを提供する。
【解決手段】 本障害物検出システムは、親局、1以上の中継子局および受信子局を備える。親局は、中継に使用する第1の子局の1つを指定する第1の局識別情報と送信先である第2の子局を指定する第2の局識別情報とを含むパケットを生成し、搬送波を発生し、中継に使用する第1の子局に向けてパケットを搬送波により送信し、中継に使用する中継子局が少なくともパケットを中継送信する期間は、搬送波の送信を継続する。中継子局は、到来する電波を受信して受信データを獲得し、受信データに含まれる第1の局識別情報が自局宛である場合に限り、親局から受信した信号を中継送信し、中継送信に続いて、パケットに付加する情報を送信する。受信子局の1つと親局との通信が正常に行われたと判断できる場合、その子局と親局との経路には障害物がないと判断する。
(もっと読む)
レーダ装置の校正方法、レーダ装置、監視システム、プログラム
【課題】 監視対象の交通路における列車の運行規制や道路の通行規制を行うことなく、簡便かつ低コストかつ短期間に校正作業を行う。
【解決手段】 鉄道50と道路60が交差する踏切51を監視する複数のレーダ装置10を設置する際に、鉄道50を走行する列車52の移動軌跡を個々のレーダ装置10にて実測することで鉄道50の位置を認識し、レーダ装置10のローカル座標系10aにて測定された障害物の測定データを、鉄道50の側の交通路座標系50aに変換するための変換マトリックス71を生成する校正処理を個々のレーダ装置10の内部で自律的に行う。校正用のリフレクタ等の標的を踏切51内に置くために鉄道50を運行規制する必要がなく、また、レーダ装置10の設置数が増えても校正作業の工数や期間が増加することもなく、簡便かつ低コストかつ短期間に校正作業を行うことができる。
(もっと読む)
車両周辺監視装置
【課題】 車両周辺の監視を廉価に行うと共に、車両周辺監視の要処理時間を短くすることができること。
【解決手段】 車両1の異なる箇所に搭載した複数台の受信器A0〜D0と、その受信器A0〜D0が受信する電磁波を出力する送信器Eとを配設し、車両1付近に検出対象が存在しない状態で、送信器Eが出力した電磁波を車両1に搭載した受信器A0〜D0で受信し、その受信電界のパターンを記憶回路に記憶させ、送信器Eが出力した電磁波を車両1に搭載した複数台の受信器A0〜D0で受信し、その受信電界のパターンを記憶回路に記憶しているパターンと比較して、車両1の周辺状態を検出する。
(もっと読む)
測定信号の材料透過式位置検出を行うための方法および装置
本発明は、測定信号の材料透過式位置検出方法に関し、とりわけ、側壁、蓋および底において材料透過式位置決定方法に関する。本発明では、高周波送信器(20,120)が測定信号(22,122)をギガヘルツ周波数領域で送信し、該測定信号(22,122)は材料(10)を少なくとも1回は透過し、該測定信号(22,122)を高周波受信器(24,124)によって検出することにより、透過位置(18)を検出する。さらに本発明は、本発明による方法を実施するための装置にも関する。  (もっと読む)
(もっと読む)
レーダ装置
【課題】短時間で目標上の電波反射点の空間位置を算出し、目標の3次元形状を算出できるレーダ装置を得ることを目的とするものである。
【解決手段】目標による反射電波を互いに異なる位置にある2つの受信手段からなる一組の受信手段で受信し、目標上の電波反射点に対応するレンジ及びドップラー周波数からなる電波反射点情報を算出する。算出された電波反射点情報をそれぞれに対応する目標上の電波反射点が一致する一組の電波反射点情報として対応付けを行い、一組の電波反射点情報並びに目標と一組の受信手段との相対位置及び相対運動から目標上の電波反射点の空間位置を算出するようにしたものである。
(もっと読む)
目標追尾装置
【課題】既追尾目標から複数の目標が分離する状況において、高い推定精度を達成する目標追尾装置を得る。
【解決手段】距離情報算出部と、単数複数判定部と、単数角度情報算出部と、複数角度情報算出部と、観測結果出力部とを有する観測情報抽出部と、データ記憶部と、軌跡推定部と、軌跡評価部とを有する追尾処理部とを備える目標追尾装置において、追尾処理部は、単数複数判定部で判定された単複判定結果に基づいて、単数であると判定されたときは、軌跡評価部で生成された航跡の仮説の中から既存の本航跡の更新による航跡の仮説のみを残し、複数であると判定されたときは、軌跡評価部で生成された航跡の仮説の中から既存の本航跡の更新による航跡の仮説を残すとともに、既存の本航跡から分離発生した新目標に相当する航跡の仮説を残す仮説限定部をさらに備える。
(もっと読む)
固定アレイを有するミリ波活性なイメージングシステム
活性なミリ波イメージングシステム(20)は、電磁放射(26,30)を、被検体ポジション(28)の被検体と送受信するよう構成されたアンテナ機器(22)を含む。コントローラ(24)はアンテナ機器(22)を操作し、受信した放射(30)を表す出力(48)を作るよう構成されたトランシーバ(38)、及びトランシーバ出力(48)を被検体の画像を表す画像データ(50)に変換するよう適合されたプロセッサ(40)を含む。アンテナ機器(22)は、被検体の周囲に沿うか被検体に向かうか被検体から離れるように、又は関係するアンテナ機器(22)と反対方向に、部分的又は連続したループ中を移動する。アンテナ機器(82)中のアンテナユニット(94)は、アレイ(98)に沿って異なる角度軌跡に向けられる。アンテナアレイ(582)は、複数のアレイセグメント(592,595,596)からも形成でき、アレイ(582)のグループはアンテナ機器(571)を形成するよう合成もできる。 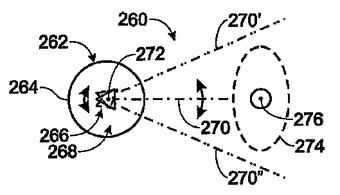 (もっと読む)
(もっと読む)
レーダ画像処理装置
【課題】観測対象の範囲に対するその範囲中で時間的変化を生じる範囲の面積比が小さい場合であっても、観測対象の時間的変化の検出精度が高いレーダ画像処理装置を得ることを目的とする
【解決手段】異なる時刻にレーダ装置により取得された観測対象の2つのレーダ画像の観測対象の所定範囲に対応するそれぞれの部分画像間の相関値を算出し、所定範囲の中で異なる時刻の間に時間的変化を生ずる範囲の面積である変化面積を予測して、所定範囲の面積及び予測された変化面積に応じて相関値を補正し、この補正された相関値をもとに所定範囲における異なる時刻の間に生じた観測対象の時間的変化を検出するようにしたものである。
(もっと読む)
スポーツ・オブジェクトのID、動き、及び場所を追跡把握するためのシステム及び方法
1つ又は複数のスポーツ・オブジェクトの場所及び飛行経路属性を追跡把握し、それらのスポーツ・オブジェクトを個人のプレーヤに関連付け、それぞれのスポーツ・オブジェクトの場所及び飛行経路を周囲のプレイフィールドに対応付け、それぞれのプレーヤが自分のスポーツ・オブジェクトの場所及び飛行経路属性にアクセスできるようにするための方法及び装置。本発明は、標準的なやり方で機能するスポーツ・オブジェクトの能力に悪影響を及ぼすことなく、GPS(Global Positioning Satellite)システムから得られた位置及び場所情報を受信及び送信する電子デバイスをスポーツ・オブジェクトに取り付ける。 (もっと読む)
高周波測定装置への妨害信号の影響を低減する方法、および、高周波測定装置
本発明は、高周波測定装置への妨害信号の影響を低減する方法、とりわけ、高周波測定装置の受信装置により検出されたアナログ測定信号(22)を該アナログ測定信号(22)のための評価ユニットの少なくとも1つのアナログディジタル変換器(28)に供給するようにした高周波測位装置を動作させるための方法に関する。
本発明によれば、前記少なくとも1つのアナログディジタル変換器(28)のサンプリングレートは妨害信号と相関する妨害信号測定値に応じて変化させられる。 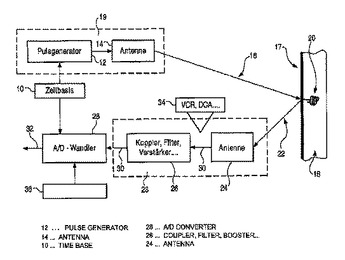 (もっと読む)
(もっと読む)
マルチRFIDアンテナによって検出される物品の位置の割り当ておよび推定方法
本発明の好ましい諸実施形態によれば、モニタリングされる一つまたは複数の品物またはオブジェクトの位置を推定するための方法(および対応する装置)が提供される。例示的な実施形態では、該方法(および対応する装置)はRFID(電波方式認識)用途(たとえば、RFIDタグを13.56MHzおよび約900MHzにおいて読み取る)において実装される。それは、複数のRFID読み取り器アンテナによってカバーされる一つまたは複数の検出領域において一意的なRFIDタグに関連付けられた品物の位置を推定することによる。 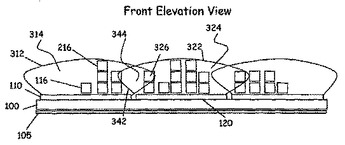 (もっと読む)
(もっと読む)
自動車用物体認識システム
本発明は、少なくとも2個の物体認識センサを備え、該センサの認識範囲が進行方向において部分的に重なる、自動車用の物体認識システムに関する。本発明によれば、第1の物体認識センサが、所定の第1垂直認識角度において、その認識範囲内で道路表面を付随的に検出し、第2の物体認識センサは、第1の物体認識センサの第1垂直認識角度未満である所定の第2垂直認識角度において、第1の物体認識センサの認識範囲内で、進行方向において道路表面を検出しない。両方の物体認識センサが物体を認識したときに限り、評価ユニットが第1の物体認識センサの認識範囲において物体の存在を推測する。 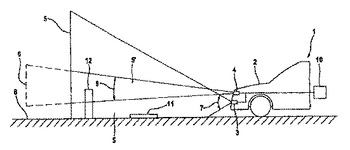 (もっと読む)
(もっと読む)
アプリケーションを感知する無線システム
少なくとも1つのアンテナ(106)を有するトランスポンダ(104)にクエリメッセージを送信する送信機(102)を有する物理的オブジェクトの空間配置を感知する無線システムである。無線周波数シールド(108)は、前記送信機と1つ以上のアンテナとの間に可動に挿置可能であり、これにより、アンテナにおいて受信された前記クエリメッセージの信号強度を減衰させる。前記物理的オブジェクトの空間配置のいかなる状態においても、前記トランスポンダは、前記クエリメッセージを受信することができ、応答として、前記1つ以上のアンテナにおいて受信される前記クエリメッセージの前記信号強度に従って決定されるデータを含む応答メッセージを送信する。 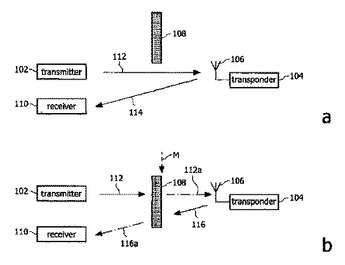 (もっと読む)
(もっと読む)
強化された監視被写体撮像
撮像システム(30)が、被写体位置(46)における被写体(32)に向けてミリ波電磁放射線を送信し、その被写体(32)からミリ波電磁放射線を受信するように構成されたアンテナ装置(48)を含む。コントローラ(62)は、アンテナ装置(48)を操作し、受信された放射線を表す出力(68)を生成するように構成されたトランシーバ(64)と、トランシーバ出力(68)から、被写体(32)の画像(130)を表す画像データを生成するように適合されたプロセッサ(70)とを含む。アンテナ装置(48)によって受信された放射線を表す画像信号の少なくとも第1の部分を使用して、被写体(32)の少なくとも一部分の第1の画像(130)を表す第1の画像データが生成される。第1の画像(130)の解像度とは異なる解像度を有する第2の画像(132)を表す第2の画像データが、画像信号の少なくとも第2の部分から生成される。 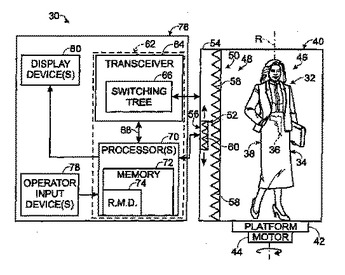 (もっと読む)
(もっと読む)
物体識別をともなう監視される被写体の撮像
撮像システム(30)が、被写体位置(46)における被写体(32)に向けてミリ波電磁放射線を送信し、その被写体(32)からミリ波電磁放射線を受信するように構成されたアンテナ装置(48)を含む。コントローラ(62)は、アンテナ装置(48)を操作し、受信された放射線を表す出力(68)を生成するように構成されたトランシーバ(64)と、トランシーバ出力(68)から、被写体(32)の画像(130)を表す画像データを生成するように適合されたプロセッサ(70)とを含むことが可能である。アンテナ装置(48)によって受信された放射線を表す画像信号の少なくとも第1の部分を使用して、被写体(32)の少なくとも一部分の第1の画像(130)を表す第1の画像データが生成される。第1の画像(130)の解像度とは異なる解像度を有する第2の画像(132)を表す第2の画像データが、画像信号の少なくとも第2の部分から生成される。 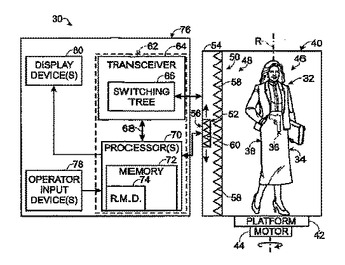 (もっと読む)
(もっと読む)
RFタグ用2−Dレンジホッピングスペクトラム拡散符号器/復号器システム
空中レーダーが友好的な車両上のタグに問いかけを行う。このタグは、レーダーからのダウンリンク信号によって問いかけられると、敵の検知及び利用を避けるように雑音のように見える非常に低いレベルのアップリンクメッセージを返信する。これは、レーダーから送信された1つおきのパルスの位相シフトされた、遅延されたバージョンを再送信することによって達成される。デジタルRFタグは、レーダーからの1つおきのパルスを捕捉し、1つおきの介在パルス時に擬似ランダム遅延(レンジホップ)及び擬似ランダム位相(方向)を含むデジタル符号化スペクトラム拡散パルスをレーダーに送信する。 (もっと読む)
1,201 - 1,220 / 1,245
[ Back to top ]