
Fターム[5J070AC01]の内容
レーダ方式及びその細部 (42,132) | 測定量 (6,664) | 位置 (1,245)
Fターム[5J070AC01]に分類される特許
1,121 - 1,140 / 1,245
ロボットの走行軌道制御システム
【課題】 ロボットの移動方向を定める上で必要な情報を、ICタグから確実に取得することができる走行軌道制御システムを提供する。
【解決手段】 放射方向に向いた複数のICタグで構成される移動標識モジュールと、走行機能を備えたロボットとからなり、移動標識モジュールをロボットの移動空間内の床、天井、壁、備品、障害物等の物体に取り付けて、移動標識モジュールのICタグに記憶された情報を、いずれの方向からでもロボットが読み取ってロボットが取得した情報に基づいて自律移動するようにする。
(もっと読む)
無線タグ通信システム

【課題】 通信対象である無線タグの正確な位置を簡便に検出し得る無線タグ通信システムを提供する。
【解決手段】 所定の基準位置に対して位置固定に設けられる第1の無線タグ14と、その基準位置に対して移動可能である第2の無線タグ16と、前記第1の無線タグ14及び第2の無線タグ16との間で情報の通信を行う無線タグ通信装置12とを、含み、その無線タグ通信装置12は、前記第1の無線タグ14及び第2の無線タグ16との間で情報の通信を行うことにより、前記基準位置に対するその第1の無線タグ14の位置を判定すると共に、その第1の無線タグ14の位置に基づいて前記基準位置に対する前記第2の無線タグ16の位置を判定するものであることから、前記基準位置に対して無線タグ通信装置12が移動したとしても、前記第1の無線タグ14との相対位置関係から前記第2の無線タグ16の位置を好適に検出できる。
(もっと読む)
合成開口を用いた無線ベースの位置決定システム
本発明は、移動局および少なくとも1つの位置固定局を有する無線ベースの位置決定システムの測定精度を高める方法に関する。本発明の特徴は、
− スタート位置から出発した上記の移動局の運動を絶対センサシステムおよび相対センサシステムの測定データによって検出し、
− この測定データを用いて開口合成の形態で仮想アンテナを形成し、
− この開口合成を使用することによって、前記の移動局を位置固定局に、および/またはこの逆に互いに焦点合わせすることである。  (もっと読む)
(もっと読む)
同一航跡判定装置
【課題】航跡作成装置が異なるセンサであっても、処理負荷を削減し、なおかつ、それまでに得られた信頼度を蓄積し、多くの航跡が密集した状態等、位置運動情報(航跡間の距離及び速度)に差がつかない状況においても、安定した確度の高い相関結果を得ることのできる同一航跡判定装置を得る。
【解決手段】従来の同一航跡判定装置の位置相関判定器7に目標類識別データ選択器11および目標類識別相関判定器12を取りつけ、位置相関判定で絞り込まれた相関の可能性がある航跡対を、目標特徴量から類推される目標類識別結果を用いてさらに絞り込む。次に従来の同一航跡判定装置の尤度算出器14に信頼度算出器15を、信頼度算出器15に信頼度記憶器16を取りつけ、航跡データ対についての信頼度を尤度算出器14で算出された尤度、及び信頼度記憶器16に記憶されている1サンプリグ前の信頼度を用いて算出する。
(もっと読む)
レーダー装置のマルチパスによる疑似目標の判定方法及びこの判定方法を用いたレーダ監視装置
【課題】 レーダーの受信信号に含まれる不要信号のうち、レーダーから目標へ引いたいわゆるレーダー視線上の遠方側(レーダーと反対側)に発生するマルチパスエコーによる擬似目標を誤目標として識別する適当な方法がなかつた。
【解決手段】 得られた目標情報と、既に追尾している追尾目標とを1対1に対応付ける相関処理を行なう相関処理手段81を設ける。そしてどの追尾目標とも対応がない目標情報は新たな追尾目標とする。一方、レーダー視線上の目標情報の手前側(レーダー側)に既存の追尾目標4が存在し、尚且つ、当該目標情報を仮の追尾目標として追尾した結果が、マルチパスエコーによる擬似目標の固有のパターンを示すか否かを判定するマルチパス判定手段82を設け、固有のパターンを示すと判定した場合は、誤目標として棄却する。
(もっと読む)
レーダアレイを較正するシステム及び技法
複数のレーダを較正するシステム及び技法が、複数の物標からのモノスタティックエコーリターンから導出される1組の連立方程式を提供する。連立方程式の解が、複数のレーダに関連する相対位置較正係数及び時間遅延較正係数を提供する。相対位置較正係数及び時間遅延較正係数により、複数のレーダを、理想的なコヒーレント処理利得と比較してごく少量の処理利得損失でコヒーレントに結合することができる。 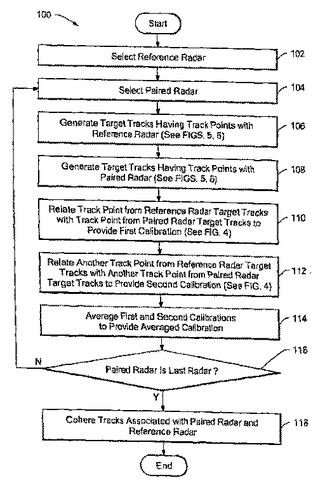 (もっと読む)
(もっと読む)
位置測定システムおよび位置測定方法
【課題】 人の足の位置を正確に測定することができるシステムであって、さらに体の向きを推測することにより、装置の消費電力を低く抑えることができる位置測定システムおよび位置測定方法を提供する。
【解決手段】 舞台面上1で、人111が右足にID発信靴右21を、左足にID発信靴左22を装着する。舞台面下2には電波送受信装置31および制御表示装置51が設置され、電波送受信装置31が舞台面上1に向けて電波を発信する。ID発信靴右21およびID発信靴左22が電波を受信し、それぞれのID情報を電波送受信装置31に送信する。電波送受信装置31はID情報と電波送受信装置の位置情報を制御表示装置51に送信する。制御表示装置5は舞台面が表示された画面上に人111の位置と向きを表示する。これを時系列的に繰り返すことにより、舞台上の人の位置と動きを画面上で確認することができる。
(もっと読む)
チャンネルインパルス応答の推定方法
時間に依存するチャンネルのインパルス応答を推定するために、超音波信号等の連続的なインパルス信号が送信され、上記チャンネルから受信される対応する信号がサンプリングされる。インパルス信号の行列の逆行列が計算され、上記受信信号のサンプルへ適用される。 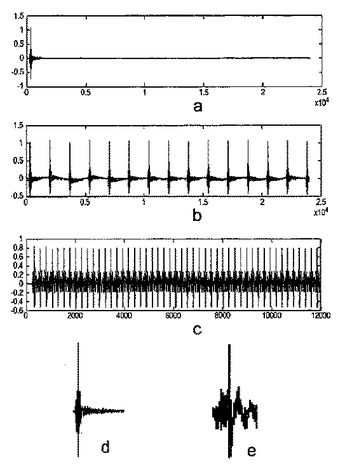 (もっと読む)
(もっと読む)
モードSトランスポンダ送信信号解読装置及びモードSトランスポンダ送信信号解読方法
【課題】モードSトランスポンダから送信された信号を正確に解読することが可能なモードSトランスポンダ送信信号解読装置及びモードSトランスポンダ送信信号解読方法を提供する。
【解決手段】モードSトランスポンダ送信信号に対して微分処理を行う微分処理部43と、微分処理がなされた信号における強度の上昇変化率と下降変化率との相関の度合を演算する相関演算部44と、相関演算処理により得られた相関の度合に基づいてパルスを再生するパルス再生部45と、再生されたパルスに対してゲート処理と位相同期処理とを行うパルス位相同期部46と、ゲート処理と位相同期処理とがなされたパルスを基にモードSトランスポンダ送信信号を解読するパルス解読部47とを設ける。
(もっと読む)
目標追尾装置
【課題】検出信号の電力情報を用いて、目標の検出追尾精度の向上を図った目標追尾装置を得る。
【解決手段】追尾目標に対する受信信号から検出信号情報を生成する検出信号情報生成手段11と、検出信号情報履歴データおよび目標航跡データを蓄積するデータ記憶部13と、特定された検出信号群の電力積分結果を算出する信号電力積分手段14と、検出信号情報および目標航跡データに基づいて航跡の仮説群データを作成して、仮説群データの中から検出信号群を特定し、対応する電力積分結果を受け取り、種々の検出信号群に対する電力積分結果に基づいて仮説群データを修正して仮説群修正データを生成し、データ記憶部13の目標航跡データを更新する航跡作成手段12と、更新された目標航跡データに対して、所定の判定基準を満たすものを真の目標航跡として特定する目標判定手段15とを備える。
(もっと読む)
情報入力方法及び情報入力装置
【課題】対象物の3次元空間における位置情報並びに物性情報を検出して、少なくとも1つのポイントの位置情報または変位情報を検出して、電子機器などの機器に対して、たとえ複数の高精度なデータであっても、その情報入力を行うことができる技術である。
【解決手段】電磁波を発信する電磁波発信手段10からの電磁波に対して、一つ以上の対象物によって反射波が生成され、反射波が電磁波受信手段20で受信される。信号処理手段30で、受信した電磁波の信号に基づき、反射波を生成した対象物の3次元空間における位置情報を算出すると共に対象物をそれと同定する物性情報を検出し、こうして検出した複数の情報に基づき入力信号を一つ以上生成して、入力信号を機器に対して提供する。
(もっと読む)
後方散乱に基くトランスポンダの位置を測定する方法
本発明は、後方散乱に基くトランスポンダの位置を測定する方法に関する。本発明に寄れば、この方法は、基地局(BS1)により不変調搬送波信号(TS)を送信し、トランスポンダ(TR1)が基地局(BS)の応答範囲へ入る時、基地局(BS1)から送信される搬送波信号(TS)の位相変調及び後方散乱により発生される位置測定信号(OS)を、トランスポンダ(TR1)により送信し、位置測定信号(OS)に基いてトランスポンダ(TR1)の位置を測定する段階を含んでいる。例えば物品経済組織における使用。 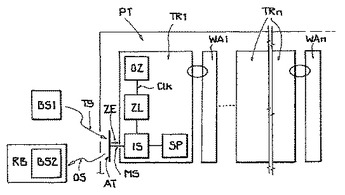 (もっと読む)
(もっと読む)
目標追尾装置
【課題】 運動モデルの信頼度の発振や、観測雑音低減性能の劣化を招かない閾値を算出して、追尾精度を高めることができる目標追尾装置を得ることを目的とする。
【解決手段】 信頼度算出器12により算出される等速直線運動の運動モデルの信頼度が所定値より高い領域内に、その運動モデルを用いて算出された予測位置を中心とする誤差楕円体が収まる閾値Aを算出する。これにより、運動モデルの信頼度の発振や、観測雑音低減性能の劣化を招かない閾値が得られ、追尾精度を高めることができる。
(もっと読む)
埋設物探査方法およびその装置
【課題】
短時間で簡便にそして高精度に埋設物の位置を非破壊で探査することができ、探査結果を高精度に被探査面上に表示することができるようにしたい。
【解決手段】
被探査面上から音波または電磁波を照射し反射波から埋設物の有無を検出する埋設物探査装置であり、音波または電磁波を照射し反射波から埋設物の有無を検出する探査手段20と、探査手段20に対し被探査面上に音波または電磁波を照射する位置を表示する投写手段40と、探査手段20が投写手段40による表示に従って音波または電磁波を照射して得た反射波データと投写手段40が表示した音波または電磁波を照射する位置データから埋設物の配置状態を算出する演算手段30と、演算手段30で得た埋設物の配置状態を被探査面上に表示する映像表示手段40を有する。
(もっと読む)
追尾装置
【課題】偽像を目標とする仮説を排除しながら、効率的に追尾処理を行うことができる追尾装置を得る。
【解決手段】各センサで得られた受信電波から目標に当たり反射した反射電波を抽出する波形抽出部4と、2つのセンサに反射電波が到達する時刻の差によって等距離差双曲面を計算し、別の2つセンサの組み合わせからも等距離差双曲面を計算し、さらに複数の等距離差双曲面の交点であって、目標の位置である測位情報を計算する測位情報計算部5と、前記測位情報に基づいて、目標の運動諸元を推定する追尾フィルタから算出される目標の航跡と、航跡の組合せにより仮説を生成し、追尾処理を実施する多重仮説生成追尾処理部61と、前記多重仮説生成追尾処理部によって生成された仮説中に、偽像を目標と見なす仮説が含まれているか否かを判定し、含まれている場合には前記偽像を目標と見なす仮説を除去する仮説絞込み部62とを設けた。
(もっと読む)
物品位置検出装置および物品位置検出方法ならびにそのプログラム
【課題】 従来に比べてより精度良く1つの装置に備えられたアンテナにより物品の位置を特定することのできる、物品位置検出装置を提供する。
【解決手段】 物品位置検出装置1の移動に伴って、物品タグからの無線信号を受信し、その無線信号に含まれる情報をデータベースなどに記録していく。また同時に、物品位置検出装置1の座標と、その座標を通過した時刻をデータベースなどに記録していく。また、重み付けの補正を行う場合には、重み付けの特定の処理を行って、重み付け値を算出する。そして、同一の物品タグから受け付けた1つまたは複数の無線信号の数と、それら無線信号の受信の各時刻における物品位置検出装置1の各座標と、移動に伴って順次受け付ける物品位置検出装置1の各座標およびそれら座標を受け付けた時刻とに基づいて、物品タグ1の座標を算出する。
(もっと読む)
多目的レーダ監視システム
本発明は森林火災のようなRCSが低い対象物(110,140,150,160,190)を検出するレーダシステム(100)を開示する。このシステムは、機構的に固定された複数のアンテナ(220)を備え、レーダエネルギーを送信する複数の送信局(120)と、機構的に固定された複数のアンテナ(220)を備え、前記複数の送信局から送信されたレーダエネルギーの反射波を受信する複数の受信局(130)とを有する。前記送信局と前記受信局との複数アンテナ(220)は地面に対して実質的には平行なメインビーム(221)をもち、前記複数の受信局の少なくともサブセットには、第1と第2の受信信号を記録する手段と、前記信号の内の一方を前記信号の他方から減算する手段とを備える。前記送信局と前記受信局とは10〜100MHzの周波数範囲で機能するように構成されている。 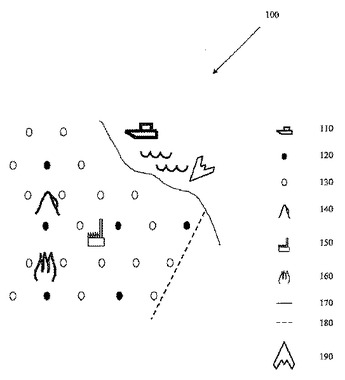 (もっと読む)
(もっと読む)
障害物検出装置および方法
【課題】 レーダと画像認識とを融合させて、精度良く先行車両を認識することを可能とした障害物検出装置および方法を提供する。
【解決手段】 前方カメラで取得した画像についてエッジ検出を行い、そのうち白線に対応するエッジを除去して障害物エッジとする。レーダによる検出結果を基にしてレーダで検出した障害物位置に応じて所定の幅の領域を所定数に等分して各領域の障害物エッジ数からヒストグラムH(t)を算出する。H(t)と前回のタイムステップのヒストグラムH(t−Δt)を比較して、時間的連続性を満たすヒストグラム値を抽出して抽出ヒストグラムH’(t)とし、これと前回のタイムステップにおける抽出ヒストグラムH’(t−Δt)を比較して、時間的連続性を満たす領域から障害物を判定する。
(もっと読む)
物品位置通知システム
【目的】本発明は、物品にICタグを貼付し位置を検出して通知する物品位置通知システムに関し、物品にICタグ、更に、当該物品を載置等する場所にICタグを貼付して複数のICタグリーダで位置を検出し、これら物品および場所の位置をもとに物品/場所の移動情報(移動前/移動後の位置、紛失)をレイアウト上に強調表示して通知することを目的とする。
【構成】 多数の物品にそれぞれ貼付したICタグから無線で情報を読み取る複数のICタグリーダと、複数のICタグリーダで送信する電波強度を可変してICタグから情報が読み取れたときあるいは読み取れ無くなったときの電波強度をもとに、テーブルを参照してICタグまでの距離を測定する手段と、複数のICタグリーダで測定したICタグまでの距離をもとにICタグの位置を特定する手段と、特定したICタグの位置と、以前のICタグの位置とを比較する手段と、比較した結果を通知する手段とを備える。
(もっと読む)
玩具
【課題】移動体模型の位置又はその位置の変化を常時監視し、さらに移動体模型が道路模型上を正しく走行していない場合に、その状態を報知する。
【解決手段】基盤上における移動体模型の位置又は位置変化を移動体模型の移動に連動して非接触で検出する位置検出手段と、位置検出手段による移動体模型の位置又は位置変化の検出に基づいて、当該移動体模型の前記道路模型上における位置又は位置変化の正誤に関する情報を遊戯者に対して報知する報知手段と、を備える。
(もっと読む)
1,121 - 1,140 / 1,245
[ Back to top ]