
Fターム[5J070AC01]の内容
レーダ方式及びその細部 (42,132) | 測定量 (6,664) | 位置 (1,245)
Fターム[5J070AC01]に分類される特許
1,221 - 1,240 / 1,245
エレベータ用超音波/電磁式非接触型ボタン/スイッチ
非接触式のデータ選択を提供する方法が、少なくとも一つのデータ選択部を提供するステップと、前記少なくとも一つのデータ選択部の付近で少なくとも一つの信号(21)を送信するステップと、前記少なくとも一つの送信された信号の経路を選択装置(31)による遮断を通して変更させるステップと、少なくとも一つの変更された信号(23)を検出するステップと、前記少なくとも一つの変更された信号から選択装置による選択を決定するステップと、を備えてなる。  (もっと読む)
(もっと読む)
人員携行型対迫レーダシステム
本発明は、敵軍の飛行迫撃砲弾を検出して追尾し、その原点(出射点)を算出して迫撃砲および砲兵への対策を講じる人員携行型対迫レーダ(MCMR)システムである。更に、MCMRは、飛行機、ヘリコプタおよび地上車両を検出して追尾することにより防衛監視を行える。MCMRは運搬のために分解可能であり、現地で迅速に組み立て、敵軍の迫撃砲による攻撃に対して360度の探索可能領域を提供する人員携行型レーダシステムである。MCMRは、レーダパルスを放射し反射された目標エコーを受信するアンテナと、アンテナから放射すべきレーダパルスを発生させる発信機と、目標エコーに関する測定(範囲、方位および仰角)を行い、多重エコーを関連づけて目標軌道を発生させ、迫撃砲弾として軌道を分類し、迫撃砲兵器の推定位置を計算する受信機プロセッサと、レーダを運転し処理済みのレーダデータを表示および解釈することができる制御および表示コンピュータとを備える。 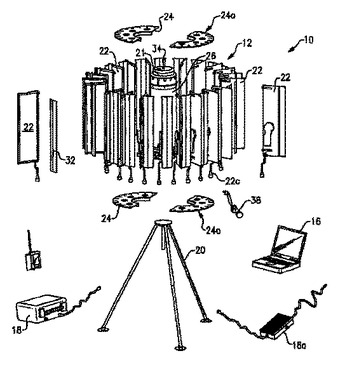 (もっと読む)
(もっと読む)
自動車のレーダーシステム

隣接車線(10,14;50)上の交通を監視するための50mよりも短い到達距離を有する少なくとも1つのレーダーセンサ(22,24)を有する,自動車(16)のためのレーダーシステムは,レーダーセンサ(22,24)が,位相制御されるアンテナ(36)と,異なる幾何学配置を有する複数のレーダーローブ(26,28;30,32;26’,28;44;46,48)を調節するための制御装置(40,42)とを有することを特徴としている。 (もっと読む)
ICタグのロケーション認識装置および方法
質問器1が、固有ID、Xa、Xb、Xcを読み取った後、IDを指定してプローブ信号発信コマンドを送信する。該当のICタグはそれぞれプローブ信号を順番に発信する。隣接するICタグ2は、質問器が指定したID,Xa、Xb、Xcを隣接IDとしてメモリに保存する。次に質問器1は隣接IDを読み取る。コントローラは、固有ID、Xa,Xb、Xcと隣接ID(Xb),(Xa・Xc)、(Xb)の組み合わせ(Xa−Xb)、(Xb−Xc)を求める。最後に繋ぎ合わせて(Xa−Xb−Xc)を得る。 (もっと読む)
車載レーダ装置およびその信号処理方法
複数のアンテナを切り替えるものにおいては、同時に検知できる範囲は1つであるため、遠距離向けのアンテナの使用時は、近距離の検知範囲が細くなり、逆に近距離向けのアンテナの使用時は、最大検知距離が低下する。また、レーダと画像センサを組み合わせるものでは、画像センサは、悪天候や光線条件(逆光,順光等)によってレーダ単体の場合と同様の検知性能になる場合がある。前方に電波を照射して反射波を受信することにより、少なくともターゲットとの相対速度又はターゲットの位置を検出する第1レーダと、該第1レーダとは検知範囲が異なる第2レーダとを備え、双方とも常時ターゲットの検知を行う。また、上記のようなレーダ装置において、ターゲットが前記第1レーダの検知範囲から外に出たときは、その直前の前記ターゲットの検知情報を前記第1レーダから前記第2レーダに引き渡す。 (もっと読む)
2つ以上のセンサを有する装置
本発明は、信号に対する送信機および受信機を備えた2つ以上のセンサを有しており、そのうち1つのセンサは他のセンサのクロスエコー信号を受信可能である、2つ以上のセンサを有する装置に関する。ここで本発明によれば、各センサが他のセンサの反射信号をそれぞれ別個に分離された状態で相互の障害なく受信および評価できるようにするために、各センサは受信動作において送信信号と受信信号とのあいだの時間遅延により相互に時間的に分離される。 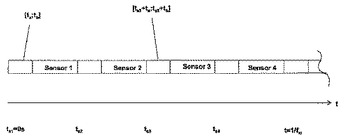 (もっと読む)
(もっと読む)
隠蔽された物体の検知
着衣の個人(22)が疑わしい隠蔽された物体(25)を携帯しているかどうかを決定するためのシステム、方法、デバイスおよび装置を開示する。この決定は、200MHz〜1THz範囲の電磁放射による検査を通じて個人(22)の画像に対応するデータを確立する工程を含む一つの形式では、反射された放射線の強度および反射する表面の深度差分に対応する画像データを受け取り処理して、疑わしい隠蔽された物体(25)を検知する。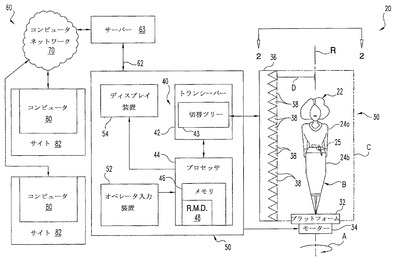
 (もっと読む)
(もっと読む)
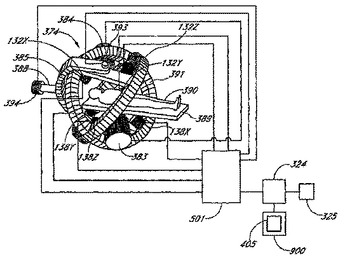
レーダー助成式のカテーテルの案内および制御のための装置および方法
備えられることができる器具としては、カテーテル、ガイドワイヤ、レーザーおよびバルーンのような二次器具がある。磁性チップは2つの機能を行なう。第1に、例えば、レーダー範囲ファインダーまたはレーダー撮像装置のようなレーダー装置を使用することによりチップの位置および配向が定められる。レーダー装置の組込みにより、CGCI装置は、外科法中、患者に埋め込まれた外科器具の位置、配向および回転を正確に検出する。1つの実施の形態では、レーダーにより発生された像は、例えば、X線、蛍光透視、超音波、MRI、CAT−走査などのような作動室像設備で表示されている。1つの実施の形態では、像は、6自由度(6−DOF)センサにより捜し出された基準点マークの助成で同期化される。レーダーおよび6−DOFセンサと組合されたCGCI装置によれば、患者の身体の外側に適切な磁場を加えることにより、器具チップを引いたり、押したり、回したり、所望位置に強制的に保持したりし得る。
 (もっと読む)
(もっと読む)
集積マイクロ波送受信機タイル構造

【課題】被検者の誘電体マイクロ波走査において、顕著な相違または異常を検出するシステムに使用する集積マイクロ波送受信機タイル構造を提供する。
【解決手段】集積マイクロ波送受信機タイル構造は、(a)規定した行および列パターン(35)に配列された、複数の一体形成されたマイクロ波送受信機(60)のアレイを有する、第1の全体的に平面の回路ボード層(35a)構造であって、各送受信機(60)が、前記第1層構造の面(35a)に対して概略的に垂直に延びる、関連の送受信機軸(60a)を有する、第1回路ボード層構造と、(b)送受信機に動作的に接続された送受信機機能動作回路を含み、送信および受信動作モードにおいて同時に送受信機の動作を促進するように機能する、第2の全体的に平面の回路ボード層(35b)構造とを含む。
(もっと読む)
車両用の車線変更運転認識方法及び装置
本発明は、車両用の車線変更運転検知方法及び装置に関する。別の観測対象車両(15)の車線変更挙動を記述する少なくとも1つの観測変数が決定される。対象車両(15)がその対象車両(15)に関わる車線から車線変更しようとする意図を特徴づける車線変更変数(CV)が、前記少なくとも1つの観測変数に従って決定される。 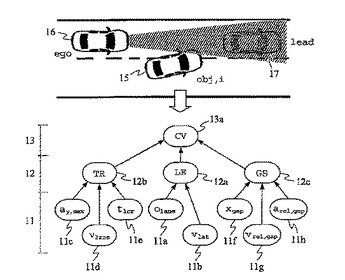 (もっと読む)
(もっと読む)
発見可能なボールに関する装置および方法
【課題】ゴルフ・ボールを見つけるためのシステムとともに使用されるゴルフ・ボールおよびその種のゴルフ・ボールを作成するための方法を提供する。
【解決手段】一例のゴルフ・ボールの場合には、ボールがカバー、コア材料、およびタグを含み、タグは、少なくとも一部が弾性導電性インク等の弾性導電性材料から形成されたアンテナに結合されるダイオードを有する。コア材料は、ダイオードの少なくとも一部を受けるためのボイドを含むことができる。このほかのゴルフ・ボールおよびボールを作成するための方法についても述べられている。
(もっと読む)
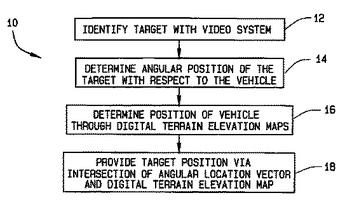
ターゲット位置特定のためのシステムおよび方法
ビークル(102)からターゲット位置を決定する方法が説明される。この方法は、ビデオシステム(124)を使用してターゲット(100)を識別するステップ(12)、ビークルに関するターゲットに対する角度位置ベクトル(104)を決定するステップ(14)、デジタル地勢高度図(122)および精密レーダ高度計(30)を使用してビークルの位置(108)を決定するステップ(16)、角度位置ベクトルがデジタル地勢高度図と交差する位置を計算するステップ、およびビークル位置ならびに角度位置ベクトルとデジタル地勢高度図との交点の位置に基づいてターゲット位置(112)を生成するステップ(18)を含む。
 (もっと読む)
(もっと読む)
無線タグの位置を確認するためのネットワーク
無線タグの位置を確認するためのネットワークが、複数の無線ノードを有する。そのノードは有線ネットワークによって共に接続される状態にはない。各ノードは、建物の内部に設置されるフロアタイルに含まれ、少なくとも1つの他のノードに対して無線接続可能であるように構成される。フロアタイルが設置されるとき、複数のノードは、メッシュ又はグリッドを形成し、メッシュを参照することによりそのタグの位置を確認するための重複する無線範囲を与える。 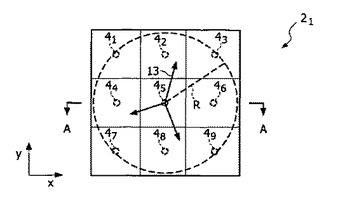 (もっと読む)
(もっと読む)
制御領域内のアイテムの位置を追跡するよう倉庫を構成するシステム及び方法
制御領域内のアイテムの位置を追跡する位置追跡システムは、位置判定の要求精度によって配置される複数のRFIDタグを備える。追跡されるアイテムを運搬するよう構成される車両は、複数のRFIDタグからRFID情報を獲得し、RFIDタグ情報をロケーション・オーソリティに伝送するよう構成される2つのRFIDインテロゲータを含む。2つのRFIDインテロゲータの間隔は、要求精度が生じるような、複数のRFIDタグの間隔に基づいて設定される。ロケーション・オーソリティは、複数のタグ毎の各々について記憶される座標情報にRFIDタグを単にマッピングして、車両と、よって、運搬されるアイテムとの位置を得ることができる。 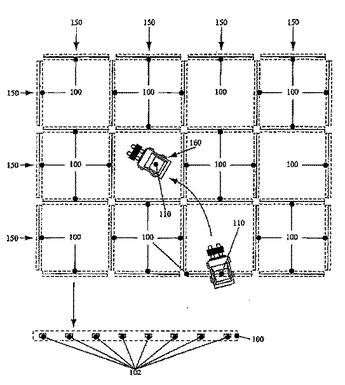 (もっと読む)
(もっと読む)
制御領域内のアイテムの位置を追跡するシステム及び方法
制御領域内のアイテムの位置を追跡する位置追跡システムは、位置判定の要求精度によって配置される複数のRFIDタグを備える。追跡されるアイテムを運搬するよう構成される車両は、複数のRFIDタグからRFID情報を獲得し、RFIDタグ情報をロケーション・オーソリティに伝送するよう構成される2つのRFIDインテロゲータを含む。2つのRFIDインテロゲータの間隔は、要求精度が生じるような、複数のRFIDタグの間隔に基づいて設定される。ロケーション・オーソリティは、複数のタグ毎の各々について記憶される座標情報にRFIDタグを単にマッピングして、車両と、よって、運搬されるアイテムとの位置を得ることができる。 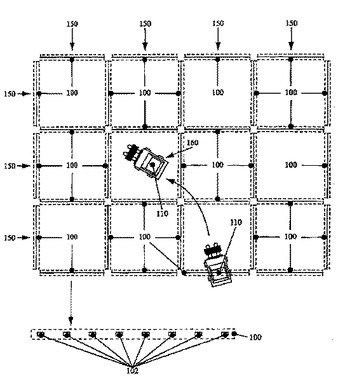 (もっと読む)
(もっと読む)
合成開口レーダシステム及び局所的な測位のための方法
測位システムは、固定された位置にあるパッシブな等方性反射標識と、デバイスとを含む。前記デバイスは、ある期間に渡って、円偏波を有する電磁パルスを送信し、帰還信号を受信する。前記帰還信号は、前記反射標識から反射されたパルスを含む。前記帰還信号から前記反射パルスを隔離するため、及び前記デバイスから前記反射標識への距離を決定するために、前記帰還信号を処理する。前記反射標識は、第1のパッシブ反射体と、第2のパッシブ反射体と、前記第1のパッシブ反射体を基準にした角度で前記第2のパッシブ反射体を静止して測位するように構成される静的構造とを含む。オプションとして、前記デバイスは、前記帰還信号を受信中に、ある特定の方向に移動し、前記帰還信号の前記反射パルス部分におけるドップラーシフトを検出し、前記特定の方向と、前記デバイスと前記標識間の直線との間の角度を決定する。
 (もっと読む)
(もっと読む)
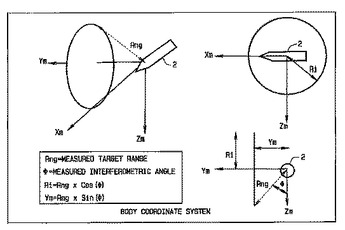
レーダ戻りデータを重み付ける方法および装置
前記レーダターゲット(48)の位置を決定することにおいて位相レーダエコーからの加算による地勢エコーフェーディングの影響を減少する方法が提供される。この方法は、レーダターゲットの地勢特徴から生じるレーダエコーフェーディングの程度に比例する、干渉角Φへ寄与する地勢特徴の影響を調整することにより、少なくともひとつのレーダエコーに基づきレーダターゲットへの干渉角Φを決定するステップと、干渉角Φをフィルタリングするステップとを含む。訂正された干渉角Φは、フィルタリングの少なくとも一部に基づいて提供される。
 (もっと読む)
(もっと読む)
信号強度による位置探索システムの自己補正方法
データ通信システム内のモバイルユニットの位置をモバイルユニットの送信信号強度に基づいて決定するシステムを、アクセスポイントからモバイルユニットまでの距離を往復時間距離を用いて決定することによって、モバイルユニットトランスミッタ電力の変化に対して較正する。時間距離を信号強度に基づく距離の値と比較し、モバイルユニットに対する補正値を時間距離と信号強度に基づく距離との差に基づいて更新する。 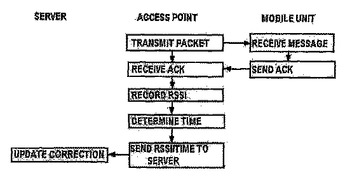 (もっと読む)
(もっと読む)
位置特定システム及びこうした位置特定システムを使用して物体又は動物を位置特定する方法
【課題】位置特定システムを使用して、物体又は動物を位置特定する。
【解決手段】特定の状況において、特定の(グループの)物体又は動物、特に人を、追跡あるいはそうでなければ位置特定することが、強く求められることがあるだろう。本発明は、位置特定システムに関する。さらに本発明は、こうした位置特定システムを使用して、物体又は動物を位置特定する方法に関する。
(もっと読む)
レーダシステムおよびレーダ信号処理装置
【課題】取得した画像データから水面の状態に関するデータを得るための処理を自動化し、これにより省力化および処理の高速化を図る。
【解決手段】アンテナ1、送受信部2、信号処理部3よりなるSARによりSAR画像データを取得する。また記憶部5に、水面の波がとり得る状態のイメージデータに波の向きを示すベクトル(矢印)およびその波長を対応付けたテンプレートデータベース5aを記憶しておく。そして、相関処理部4により、SAR画像データを複数の区域に分割してそれぞれテンプレートとの相関を取り、相関値の最も高いテンプレートに対応付けられた波の向きと波長とを記憶部5から読み出す。またこの読み出したデータをもとに、演算部6で最適進入コースを算出するようにした。
(もっと読む)
1,221 - 1,240 / 1,245
[ Back to top ]