
Fターム[5J070AC02]の内容
レーダ方式及びその細部 (42,132) | 測定量 (6,664) | 距離 (2,439)
Fターム[5J070AC02]の下位に属するFターム
Fターム[5J070AC02]に分類される特許
361 - 380 / 2,290
航法支援装置
【課題】本発明は、複数のフィルタを併用することにより目標の位置、距離、速度、方位の何れかを得る航法支援装置に関し、構成が大幅に複雑化することなく、精度を高めることを目的とする。
【解決手段】目標から到来した受信波に基づいて前記目標の位置、距離、速度、方位の全てまたは一部の予測および推定を個別に行う複数N個のフィルタと、前記目標の特徴を得る特徴識別手段と、前記複数N個のフィルタ毎に特性が前記特徴に整合するほど値が大きく、かつ前記複数Nのフィルタに個別に対応する重みW1〜WNを設定する重み設定手段と、前記複数のフィルタによって行われた推定の結果と前記重みW1〜WNとの積和として前記目標の位置、距離、速度、方位の全てまたは一部を得る重み付け手段とを備える。
(もっと読む)
先行車検出装置

【課題】2WS基準システムまたは4WS基準システムにおけるオフセット値に対して、さらに自車に適合する差分量を加算することによって、カーブ路における自車線上の先行車を精度よく検出できる先行車検出装置を提供する。
【解決手段】本発明の先行車検出装置は、自車の車両情報に基づいて当該自車が2WS車か4WS車かを判定する車両判定手段と、自車の前方にある物標の横位置情報を取得する横位置情報取得手段と、2WS車または4WS車に応じて横位置情報を自車のカーブ路における車体スリップ角が0度である直線走行方向基準の横位置情報に換算するオフセット値を算出するオフセット値算出手段と、オフセット値に基づいて横位置情報を直線走行方向基準の横位置情報に換算する直線走行方向基準換算手段と、直線走行方向基準の横位置情報に基づいて自車の前方にある物標が自車の前方にある先行車であるか否かを判定する先行車判定手段とを備える。
(もっと読む)
移動無線測位装置
【課題】移動端末の位置を高精度で測位できる移動無線測位装置を安価に実現する。
【解決手段】基準局201の周辺に間隔をおいて複数の中継局202a〜202dを配置し、前記基準局201と複数の中継局202a〜202dとの間を伝送ケーブル101a〜101dを介して接続し、前記基準局201と移動端末203との間で前記複数の中継局202a〜202dを介して双方向通信を行うことによって、前記移動端末203の位置を測位する。
(もっと読む)
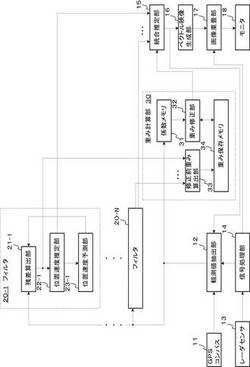
車両用レーダ装置
【課題】受信波形と基準信号との差分に基づいて測距を行う際に、車両走行状態で周囲環境が変化しても安定的に基準信号を取得する。
【解決手段】基準信号取得部24でターゲットが存在しない状態の受信検波波形を「基準信号」として取得し、処理波形算出部25で受信検波波形から基準信号を差分して実際のターゲットからの受信波形を取り出し、距離測定演算部26で距離演算を行う。基準信号の取得は、基準信号となる受信波がターゲットの反応を含んだものより信号レベルが低くなることに着目して行い、複数回のフレームデータ(受信検波波形)から、サンプリング時間毎に最低値又は最低値に順ずる値を抽出し、抽出した値をつなげて作成したフレームデータを基準信号として取得することで、閾値を用いることなく走行状態で基準信号を安定的に取得して更新する。
(もっと読む)
エコー信号処理装置、レーダ装置、エコー信号処理プログラム及びエコー信号処理方法
【課題】簡単な構成で、物標追尾等の処理で用いることができる有用な情報を取得することが可能な信号処理装置を提供する。
【解決手段】信号処理装置3は、スキャン相関処理部33と、物標状態判別部38と、を備える。スキャン相関処理部33は、第1の時刻に受信された第1エコー信号のレベルと、前記第1の時刻よりも前の第2の時刻に受信された第2エコー信号のレベルと、に基づいて、第1の時刻におけるスキャン相関信号レベルを出力する。物標状態判別部38は、第1エコー信号のレベルと、第1の時刻におけるスキャン相関信号レベルと、に基づいて、第1エコー信号に対応した物標の状態を判別する。
(もっと読む)
広帯域レーダ装置及び広帯域レーダ装置の制御方法
【課題】送信信号の送信条件及び受信信号の受信条件の少なくとも一方を適切に設定すること。
【解決手段】遮蔽物を透過させ目標物に送信信号を送信する送信部20と、前記遮蔽物及び前記目標物のうち少なくとも前記遮蔽物において反射された送信信号を受信信号として受信する受信部30と、前記受信信号に基づき、前記送信部が前記送信信号を送信する条件及び前記受信部が前記受信信号を受信する条件の少なくとも一方を設定する設定部60と、を具備する広帯域レーダ装置。
(もっと読む)
パルスレーダ装置
【課題】受信パルスの電力が微弱であっても妨害信号と本来の検出対象からの受信信号とを確実に識別し、レーダ計測精度の向上を図る。
【解決手段】送信アンテナ2から送信波を放射し、受信アンテナ3を介して受信回路23で取得した受信信号を信号変換部24で等価時間サンプリングしてアナログ信号からデジタル信号に変換し、受信波の波形データにノイズが含まれているか否かを信号判定処理部25で判定する。信号判定処理部25は、等価時間サンプリングした受信波の波形データの変化率の変動を算出し、変化率の変動が急峻な場合、妨害波による異常データが混入していると判断する。これにより、受信パルスの電力が微弱であっても妨害信号と本来の検出対象からの受信信号とを確実に識別し、レーダ計測精度の向上を図ることができる。
(もっと読む)
電子走査型レーダ装置、受信波方向推定方法及び受信波方向推定プログラム
【課題】検出精度を低減させることなく、高い精度で受信波の到来方向の検出を行う電子走査型レーダ装置、受信波方向推定方法及び受信波方向推定プログラムを提供する。
【解決手段】周波数分解処理部22は、送信波及びターゲットから到来する受信波からビート信号に基づいた複素数データを算出する。ターゲット検知部31は、ビート周波数の強度値からピーク値を検出してターゲットの存在を検知する。ターゲット連結処理部32は、現在及び過去の検知サイクルにおいて検出される前記ターゲットを関連付ける。方位検出部30は、複素数データに基づく生成複素数データを、データ生成手段に対応させて生成し、アンテナ毎に、ターゲットの存在が検知されたビート周波数の複素数データ、及び、生成複素数データを用いてそれぞれ作成された正規方程式に基づいて受信波の到来方向を算出する。
(もっと読む)
車載レーダ装置
【課題】ADCやDAC等に起因するレーダ性能の故障・劣化を効率良く判定出来る車載レーダ装置を提供する。
【解決手段】送信・受信信号から被検出体までの距離や速度等を算出するレーダ信号処理回路13を有した演算手段14を備え、DAC5で生成する周波数変調制御信号が入力され、ゲイン・オフセットを調整するアンプ6と、該アンプの出力をADC8の入力に接続するスイッチ7を設け、演算手段はアンプの出力レンジとADCの入力レンジが同じになるようにゲイン・オフセットを制御し、DACの出力レンジをADCの入力フルレンジに合わせるようにアンプを制御するゲイン・オフセット制御回路9と、ゲイン・オフセット量の初期値を記憶する初期値記憶回路12と、記憶された初期値と検査時のゲイン・オフセット量を比較して当該装置の異常有無を判定する故障判定回路11を設ける。
(もっと読む)
レーダ装置
【課題】装置構成の複雑化や大規模化を招くことなく、目標の移動によるドップラ偏移がある場合にもレンジサイドローブの増大(劣化)の影響を低減するレーダ装置を得る。
【解決手段】レーダ装置は、相互相関処理の結果からピーク位置を検出するピーク検出器と、該ピーク位置の両側の第1サイドローブの位置を検出する第1サイドローブ検出器と、上記両側に検出された第1サイドローブの振幅値を比較するとともに振幅値の小さい上記第1サイドローブ側のデータを切り出す第1サイドローブ比較器と、アップチャープを送信したときに切り出した上記データとダウンチャープを送信したときに切り出した上記データを合成するデータ合成器と、データ合成後の振幅データから所定閾値以上の値を持つ位置を検出する信号検出器と、上記検出された位置を距離に変換する測距器と、を備えた。
(もっと読む)
FM−CWレーダ装置
【課題】ビット数の少ないAD変換器を用いて目標物を検出するFM−CWレーダ装置を得ること。
【解決手段】送信波と反射波との周波数差の信号であるビート信号の出力先を切り替えるアナログスイッチ12と、ビート信号に対して最も広い通過特性を持つバンドパスフィルタ13と、ビート信号に対して所望の周波数以下の帯域を減衰させる特性を持つバンドパスフィルタ14と、アナログスイッチ12がビート信号の出力先としたバンドパスフィルタを入力元とする接続の切り替えを行うアナログスイッチ15と、通過したバンドパスフィルタの特性に応じた利得でビート信号を増幅する利得制御増幅器16と、ビート信号を通過させるバンドパスフィルタを決定して各アナログスイッチへ通知し、さらに、当該バンドパスフィルタの特性に基づいて利得制御増幅器16の利得の大きさを決定する制御部17と、を備える。
(もっと読む)
車載レーダ装置
【課題】付着物検知手段で、レドームの付着物が検出された場合に、付着物が一時的にレドームに付着している状態か、定常的にレドームに付着している状態かを判別する車載レーダ装置を得る。
【解決手段】付着物検知手段16はレドーム6の付着物7による反射波の時間的変動を検出するレドーム反射変動検出部を備え、付着物検出手段16によりレドーム6の付着物7が検出された場合に、レドーム反射変動検出部により、レドーム6の付着物7による反射波の時間的変動が大きいときは、レドーム6に一時的に付着物7が付着したと判断し、レドーム6の付着物7による反射波の変動が小さいときは、レドーム6に定常的に付着物7が付着したと判断する。
(もっと読む)
先行車検出装置
【課題】従来に比して正確に先行車の位置を検出可能な先行車検出装置を提供する。
【解決手段】自車両の前方を走行する先行車の位置を検出する先行車検出装置であって、少なくとも先行車の左右方向の位置情報を検出する先行車位置検出手段と、現時点において検出した位置情報を補正するフィルタ補正手段と、先行車の走行状態を推定する先行車走行状態推定手段と、フィルタ補正手段による補正の度合いを、先行車走行状態推定手段によって推定された先行車の走行状態に応じて変更するフィルタ制御手段とを備える先行車検出装置である。
(もっと読む)
広帯域パルスレーダの距離計測方法
【課題】精度の高い距離計測が可能な広帯域パルスレーダの距離計測方法を提供する。
【解決手段】広帯域パルスレーダ信号の目標物からの反射波受信信号に対して各々異なる基底関数を使用する複数のウェーブレット変換を行なって各々ピーク値を算出する(ステップ23A,23B)。算出されたピーク値に補正を行ない(ステップ24)、この補正されたピーク値に基づいて距離算出を行なう。
(もっと読む)
移動体周辺監視システム
【課題】送信波を放射することにより障害物を検知する複数の検知センサを備えた移動体周辺監視システムにおいて、各検知センサ間の干渉を抑制し、検知精度の向上を図る。
【解決手段】各検知センサ2は、信号源20の発振周波数を掃引する周波数制御回路21と、上記発振周波数と同じ周波数の送信波を放射する送受信回路22と、電源制御回路24とを備える。電源制御回路24は、上記発振周波数が掃引される期間だけ、上記送信出力をオンし、他の期間は、上記送信出力をオフする。従って、いずれかの検知センサ2で上記発振周波数が掃引され上記送信出力がオンであるときに、他の検知センサ2で上記発振周波数が掃引されていなければ、他の検知センサの上記送信出力はオフされている。このため、各検知センサ2の送信波又は反射波と他の検知センサの送信波又は反射波との間の干渉の発生を防ぐことができ、検知センサ2の検知精度の向上を図ることができる。
(もっと読む)
距離測定装置
【課題】距離測定装置において、測定期間の延長及び製造コストを抑えながら、測定可能な距離範囲を近距離側にも遠距離側にも拡げる。
【解決手段】距離測定装置においては、周波数制御回路により周波数掃引される送信波と反射波との合成波のパワーが検出され、その検出信号が、分析回路により、特定の処理期間、サンプリングされ、その周波数成分が分析される。そして、その分析結果を基に距離が算出される。上記周波数制御回路は、周波数掃引幅が互いに異なる掃引パターンP1、P2、P3の各々に従って掃引する。従って、測定対象物までの距離が、近、中、遠距離のいずれであっても、上記検出信号の周波数を、分析回路により分析可能な周波数範囲内に収めることができ、各距離を測定することができる。しかも、近/遠距離側の測定範囲を拡げるために、上記処理期間を延ばしたり、分析回路を高速度の演算が可能なものにしたりしなくて済む。
(もっと読む)
誘導装置
【課題】
HPRF(High Pulse Repetition Frequency)の電波にて目標を探知・追尾する従来の誘導装置においては、メインローブクラッタと目標のドップラ周波数が重なる領域(ビーム領域)では、メインローブクラッタと目標の区別がつかず、メインローブクラッタを誤検出する可能性があるため、あらかじめメインローブクラッタの周波数領域を算出し、その領域内は探知しないようにしているため、クラッタのレベルが低く、実際は目標を探知できる場合があったとしても、探知できないという課題がある。
【解決手段】
従来は受信部と局部発振部が1セットであったが、複数の受信部と局部発振部のセットを有することで、目標からの反射信号とクラッタを弁別することができ、ビーム領域の目標を探知することを可能にするものである。
(もっと読む)
測距・通信複合システム
【課題】測距機能と通信機能とを一体化して処理可能な測距・通信複合システムを提供する。
【解決手段】本発明の測距・通信複合システム1は、送信部2と受信部3から構成されており、測距と通信の2つの機能を統合化している。送信部2は、送信回路4、搬送波変調手段5、及び送信アンテナ6から構成されており、受信部3は、受信回路7、検波器8、低雑音増幅器(LNA)9、及び受信アンテナ10から構成されている。送信回路4で行われるデータ変調は、PPM方式を用いている。また、受信回路7は測距と通信の復調処理を並列して行えるよう、測距回路11と通信回路12を別々に設けている。
(もっと読む)
車載用レーダ装置及び車載用レーダシステム
【課題】多周波変調異常を検出する機能を有する車載用レーダ装置を提供する。
【解決手段】2周波CW変調処理部101のように、送受信信号のIF信号に位相差が発生するような変調処理方式と、FM変調処理部102のように、送受信信号から得られるドップラ周波数がターゲット距離に応じて変動するような特性を持つ変調方式を有し、前記位相差から算出されるターゲット距離と、前記ドップラ周波数の変動量から算出されるターゲット距離の差分が所定値以上になった場合、多周波変調処理が異常であると判断することができる。
(もっと読む)
距離測定装置
【課題】距離測定装置において、距離測定の信頼性の向上を図る。
【解決手段】距離測定装置においては、周波数制御回路により周波数掃引される送信波と反射波との合成波のパワーが検出され、その検出信号の周波数成分が、分析回路により分析され、その分析結果を基に距離が算出される。周波数制御回路は上記発振周波数の掃引を複数回行う。そして、各回に距離算出回路により算出される距離データのうち、全ての回に存在する距離データが距離判定回路により真値と判定される。これにより、複数回の発振周波数掃引のいずれかの回で、外来ノイズ又は干渉等に起因して、誤った距離データが距離算出回路により算出されたとしても、他の回の周波数掃引時に誤った距離データが算出されなければ、距離判定回路は誤った距離データを真値と判定しない。従って、真値と判定される距離データに誤差が生じ難くなり、そのため、距離測定の信頼性の向上を図ることができる。
(もっと読む)
361 - 380 / 2,290
[ Back to top ]