
Fターム[5J070AC02]の内容
レーダ方式及びその細部 (42,132) | 測定量 (6,664) | 距離 (2,439)
Fターム[5J070AC02]の下位に属するFターム
Fターム[5J070AC02]に分類される特許
321 - 340 / 2,290
データ処理装置
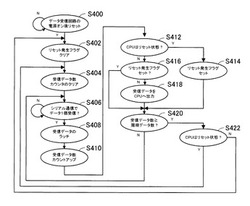
【課題】リセット状態を解除されたCPUが周期データの先頭位置を検出することなく、周期データの適切な位置からデータを処理できるデータ処理装置を提供する。
【解決手段】データ受信回路は、CPUがリセット状態の場合(S412:Yes)、データ計測装置から受信したデータをCPUに出力せず、リセット発生フラグをセットする(S414)。CPUはリセット状態ではないが(S412:No)、リセット発生フラグがセットされている場合(S416:Yes)、CPUのリセット状態は解除されているが周期の最後までデータを受信していないことを表しているので、データ受信回路はCPUにデータを出力しない。受信データ数が1周期分のデータ数以上の場合(S420:Yes)、周期の最後のデータを受信したことを表しているので、CPUがリセット状態ではない場合(S422:No)、データ受信回路はS402でリセット発生フラグをクリアする。
(もっと読む)
降雨観測設備の投資計画評価方法

【課題】降雨レーダと地上雨量計との補完関係を考慮して降雨観測設備の投資計画を評価することにより、降雨レーダの設置位置の見直しや地上雨量計の追加など最適な設備投資計画に資する方法を提供する
【解決手段】降雨観測設備1は、ダム流域から離れた任意の位置に配置される降雨レーダ2と、ダム流域内に配置される地上雨量計3とから構成される。降雨レーダ2からのビームがダム流域までの間に存在する地形遮蔽物を越える最小仰角αで発射される条件の下で、ダム流域上に到達するビーム高度に応じてダム流域を区分するとともに、各ダム流域をその流域内に設置された各ダム毎の流域に細分化し、この細分化した各ダム毎の流域について既設の地上雨量計3の配置数をその残流域面積で除した地上雨量計設置密度に応じて区分し、前記ビーム高度に応じた区分と地上雨量計設置密度に応じた区分との関係から、降雨観測設備1の投資計画を評価する。
(もっと読む)
レーダ装置及びコンピュータプログラム
【課題】アンテナの指向性制御によらずに、検知した対象物が上方構造物であるか否か判別する。
【解決手段】電波を送信する送信アンテナ3と、送信された電波が対象物により反射された電波を受信する受信アンテナ1nと、受信された電波を所定の時間間隔で取得する受信波取得部7と、受信波取得部7の取得回数の関数として、受信された電波の電力を算出する受信電力算出部22と、関数から複数の代表点を抽出する代表点抽出部28と、代表点に基づいて対象物を前記受信アンテナの光軸より高い位置にある上方構造物であるか否か判定する判定処理部29と、を備える。
(もっと読む)
閾値設定方法、物標探知方法、閾値設定装置、物標探知装置、閾値設定プログラム、および物標探知プログラム
【課題】不要成分と物標とを識別する閾値を、物標の有無に影響されずに自動で設定する。
【解決手段】注目の距離位置[n]のエコー信号のレベルEcho[n]が、閾値レベルTh[n]よりも低ければ、注目の距離位置[n]の閾値レベルTh[n]を低く更新設定する。エコー信号のレベルEcho[n]が、閾値レベルTh[n]よりも高く、閾値レベルTh[n]が注目の距離位置[n]に対してアンテナ側に隣接する距離位置[n−1]の閾値レベルTh[n−1]よりも高ければ、閾値レベルTh[n]を低く更新設定する。エコー信号のレベルEcho[n]が閾値レベルTh[n]よりも高く、閾値レベルTh[n]が注目の距離位置[n]に対してアンテナ側に隣接する距離位置[n−1]の閾値レベルTh[n−1]よりも低ければ、閾値レベルTh[n]を高く更新設定する。
(もっと読む)
レーダ装置、路側器及び車載装置
【課題】探知波を反射した物体が特定の反射部材か否かを識別できるレーダ装置を提供する。
【解決手段】レーダ装置1は、第1の偏波面を持つ探知波を放射する送信アンテナ4と、探知波が物体によって反射された、第1の偏波面を持つ第1の反射波を受信する第1の受信アンテナ(5−1)と、探知波が物体によって反射された、第1の偏波面から所定角度回転した第2の偏波面を持つ第2の反射波を受信する第2の受信アンテナ(5−2)と、第2の反射波の信号電力が第1の反射波の信号電力よりも大きい場合、第2の反射波を反射した物体は探知波の偏波面を回転させる反射部材であると判定する判定部(9)とを有する。
(もっと読む)
閾値設定方法、物標探知方法、閾値設定プログラム、物標探知プログラム、および物標探知装置
【課題】不要成分と物標とを識別する閾値を、物標の有無に影響されずに自動で設定する。
【解決手段】注目の距離位置[n]のエコーレベルEcho[n]と、近接位置[n−1]のエコーレベルEcho[n−1]との差分値diff[n]を算出する(S101)。差分値diff[n]が閾値γよりも高ければ(S102:Yes)、注目の距離位置[n]のエコーレベルEcho[n]と閾値レベルTh[n]とから新たな閾値レベルTh[n]を設定する(S105)。一方、差分値diff[n]が閾値γ以下であれば(S102:No)、注目の距離位置[n]のエコーレベルEcho[n]と閾値レベルTh[n]、および近接位置[n−1]の閾値レベルTh[n−1]とから新たな閾値レベルTh[n]を設定する(S106)。
(もっと読む)
電子走査型レーダ装置、受信波方向推定方法及び受信波方向推定プログラム
【課題】ARモデルの適切な次数設定と精度の良い方位推定により受信波の到来方向の検出を行う電子走査型レーダ装置、受信波方向推定方法及び受信波方向推定プログラムを提供する。
【解決手段】周波数分解処理部がビート信号を予め設定された周波数帯域幅を有するビート周波数に周波数分解して、ビート周波数毎に分解されたビート信号に基づいた複素数データを算出する。方位検出部がビート信号に基づいて算出された複素数データを要素とする第1の次数の行列の固有値の値に基づいて正規方程式の次数を推定し、該推定された第2の次数の正規方程式を作成し、該作成された第2の次数の正規方程式に基づいて前記受信波の到来方向を算出する。
(もっと読む)
物体移動検出方法、物体移動検出システム、輸送物移動検出システム、開閉検出システム、コネクタ接続検出システム
【課題】ICタグを利用して、精度のよい移動検出をできる物体移動検出方法、物体移動検出システム、輸送物移動検出システム、開閉検出システム、コネクタ接続検出システム提供する。
【解決手段】物体移動検出方法は、ICタグ20を、物体2に設けるICタグ設置工程と、ICタグ20に対する位置に応じて読み取り装置40及びICタグ20間の通信距離を変化させるブースタ部30を、物体3に設けるブースタ部設置工程と、通信距離の変化を検出する検出工程と、検出工程の検出結果に基づいて、物体2及び物体3が相対移動した否かを判定する判定工程と、を備える。
(もっと読む)
信号処理装置、レーダ装置、信号処理方法、および信号処理プログラム
【課題】干渉以外のエコーに対する抑圧を低減しつつ、干渉成分を的確に除去することができる信号処理装置を提供する。
【解決手段】空間フィルタ172は、例えば鮮鋭化フィルタ等からなり、複数の過去のエコー信号を画像メモリ16から読み出し、注目サンプルの鮮鋭化を行う。例えば、注目サンプルy’(i,j)を囲む8画素のエコー信号を含む9画素についてのエコー信号を画像メモリ16から読み出し、鮮鋭化処理を行う。そして、相関処理部17は、画像データ生成部15から入力された最新のデータと、空間フィルタ処理後の過去のデータと、の重み付け加算を行う。
(もっと読む)
信号処理装置、レーダ装置、車両制御システム、および、信号処理方法
【課題】連続性判定おいて検知点を適切に処理することを目的とする技術を提供する。
【解決手段】ピーク信号の組み合わせを誤ったペアリングで検出された可能性のある検知点を特定検知点とし、この特定検知点に特定された過去検知点と、他の過去検知点とで減算する減算値を変更する。これにより、過去検知点が特定検知点に特定された過去検知点か他の過去検知点かに応じてメモリからの削除のタイミングを調整できる。
(もっと読む)
監視装置、方法及びプログラム並びに監視システム
【課題】
バードストライクの危険のある鳥の接近を監視し、警告する。
【解決手段】
レーダ装置(10)が、周囲を走査して得られるレーダ画像データを周期的に出力する。コンピュータ(30)で動作する監視プログラムの背景生成機能(32a)が、複数シーン数のレーダ画像データから背景画像データを生成し、背景除去機能(32c)が、その後のレーダ画像データから背景画像データを除去する。2値化機能(32d)がエコー画像を2値化し、中心決定機能(32e)が各エコー画像の中心を決定し、雨雪除去機能(32f)が、雨雪を除去する。追跡機能(32g)は、複数シーンの前雪除去結果から、鳥を追跡する。警告機能(32h)は、鳥が所定領域に入ると警告を出力する。
(もっと読む)
寝床看護システム
【課題】 寝返りの有無の検知、ベッドからの落下検知、又は無呼吸若しくは過呼吸の検知を、従来と比較して簡素なシステム構成で、従来よりも正確になし得る寝床看護システムの提供。
【解決手段】 照射波と反射波の位相差を検知するドップラーセンサー1と、タイマー2と、照射波と反射波の位相差及び時間から看護対象の動作時間、動作速度、及び看護対象の動作方向を導く検波部3と、看護対象の動作速度、及び看護対象の動作方向から看護対象の動作周期、及び動作量を導く演算手段4と、ドップラーセンサー1、検波部3、及び演算手段4から与えられた情報から看護対象の異常を検知して報知指令を出力する信号処理部5と、報知指令を受けてアラームを発する報知手段6を備え、信号処理部5は、呼吸検知手段7と、寝返り検知手段8と、落下検知手段9を備える寝床看護システム。
(もっと読む)
回転駆動装置および電波レンズアンテナ装置
【課題】 小型化と動作精度の向上との両立を図ることが可能な回転駆動装置および電波レンズアンテナ装置を提供すること。
【解決手段】 それぞれが出力端を有しており、かつ互いに独立に軸回転する外筒軸5および内筒軸4を備えており、外筒軸5の出力端の回転駆動力を駆動源として一対のルネベルグレンズ21を駆動するとともに、外筒軸5および内筒軸4の出力端の回転数差によって生じる回転駆動力によって一対のフィード22を駆動する
(もっと読む)
レーダ情報処理装置及びレーダ情報処理プログラム
【課題】管制対象とする航空機目標を速やかに自動追跡に移行できるようにする。
【解決手段】レーダ情報処理装置3は、ASR/SIF(SSR)装置1から第1の更新レートで更新される第1のレーダ情報を受信し、PAR装置2から上記第1の更新レートより高い第2の更新レートで更新される第2のレーダ情報を受信し、第1のレーダ情報と航空機の飛行計画情報とを対応付ける第1の相関処理部31と、第1のレーダ情報をもとに第1の更新レートより短い周期で航空機の位置を予測する追跡処理部32と、追跡処理部32により予測された位置をもとに第1のレーダ情報と第2のレーダ情報とを対応付ける第2の相関処理部とを備える。
(もっと読む)
レーダ装置
【課題】従来はレーダ装置が車両の進行方向のターゲットの高さを算出するために所定の演算処理時間がかかっていた。この演算処理時間による遅れ時間を解消し、より迅速な警報指令の送信を可能にする。
【解決手段】演算処理器26は、予め定めた検出範囲においてターゲット32の反射波42の強度の極小点を検知したときに警報器に対して警報指令を送る。検出範囲における強度の極小点の有無に基づいて警報指令の要否を判定することにより、従来よりも迅速に警報指令の要否判定を行うことが可能となる。
(もっと読む)
死角車両検出レーダーシステム
【課題】送信波の平均電力が高く、回折波の微弱な信号のS/N比を改善することができ、信号機のない交差点で死角から進入する見通し外の車両等目標物を高精度に検知することができ、出会いがしらの衝突といった事故を減少させることができる死角車両検出レーダーシステムを得る。
【解決手段】送受信信号のビート周波数信号に基づいて測定対象物までの距離を求めるFMCW方式に基づくものであって、回折損の異なる低周波数と高周波の信号を同時に送信し、それぞれに対応した目標物からの反射波を受信する送受信手段(1−7、1’−7’)と、周波数差に基づく回折波の強度差により死角車両を検出する死角車両検出部8とを備える。
(もっと読む)
情報処理装置、認識システム、認識方法、及びプログラム
【課題】認識に用いる特徴を選択することにより認識率を向上させることのできる、情報処理装置、認識システム、認識方法、及びプログラムを提供する。
【解決手段】情報処理装置は、認識対象20に対して放射した電磁波又は超音波である放射波の周波数と、上記放射波が上記認識対象により反射した反射波の周波数との差分の周波数を有するドップラーセンサ出力信号を取得するデータ取得部102と、予め取得された上記ドップラーセンサ出力信号のサンプルデータの評価結果に応じて、特徴を選択する特徴選択部112と、上記特徴選択部により選択される特徴に対応する特徴量を、上記ドップラーセンサ出力信号から抽出する特徴量抽出部106と、上記サンプルデータの特徴量のうち、上記特徴選択部により選択される特徴に対応する特徴量、及び、上記特徴量抽出部により抽出される特徴量のパターンマッチングにより、認識処理を実行する認識部108とを有する。
(もっと読む)
レーダ装置
【課題】ターゲットから反射波を受信した際に、当該ターゲットが上方構造物であるか車両であるかを判別できるようにする。
【解決手段】演算処理器26は、反射波の強度の2階微分値を算出し、当該2階微分値に基づいてターゲット32が上方構造物であるか車両であるかを判別する。または、反射波の強度波形を周波数成分に分離し、特定の周波数成分の強度に基づいてターゲット32が上方構造物であるか車両であるかを判別する。
(もっと読む)
測位装置及び測位方法
【課題】アンテナアレイを用いることなく、平面方向における位置関係を測位して、測位した位置関係を通知する測位装置及び測位方法を提供する。
【解決手段】測位装置100は、第1アンテナ、第2アンテナ及び第3アンテナのうち、いずれかのアンテナ140と、第1アンテナと第2アンテナとの第1距離と、第1アンテナと第3アンテナとの第2距離と、第2アンテナと第3アンテナとの第3距離とのうち、無線通信により測距された第1距離及び第2距離を取得する取得部112と、第1〜第3距離に基づいて、各アンテナを結ぶ線から成る三角形の内角を算出し、各アンテナの位置関係を測位する測位部113と、第2アンテナにおける第1内角及び第3アンテナにおける第2内角のいずれも鈍角でない場合、位置関係を通知する判定部114と、を備える。
(もっと読む)
干渉レーダーの曖昧さを除去するために証拠グリッドを使用するためのシステムと方法
【課題】2つのレシーバだけを使用して干渉を用いた関連する曖昧さを除去する手段を提供する。
【解決手段】システムは、第1の空間領域の上の第1の検出信号および第2の空間領域の上の第2の検出信号を送信する干渉レーダーを含む。第2の領域は、第1の領域と同じように第1の小区域を有する。システムは、第1の占有値を証拠グリッドの第1のセルに割り当てる処理装置を更に含む。第1のセルは、第1の小区域を表し、第1の占有値は、オブジェクトが第1の小区域に存在するとして第1の検出信号により検出されたかどうか特徴づける。第1および第2の検出信号に基づいて、処理装置は、第1の占有値が第1の小区域のオブジェクトの存在を正確に特徴づける確率を計算し、確率計算に基づいて第1の小区域のデータ表現を生成する。
(もっと読む)
321 - 340 / 2,290
[ Back to top ]