
Fターム[5J070AC02]の内容
レーダ方式及びその細部 (42,132) | 測定量 (6,664) | 距離 (2,439)
Fターム[5J070AC02]の下位に属するFターム
Fターム[5J070AC02]に分類される特許
281 - 300 / 2,290
障害物認識装置
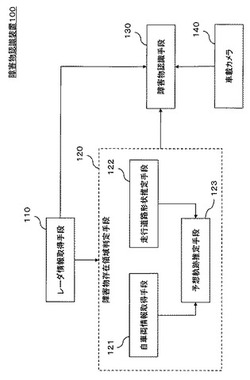
【課題】自車両周辺に存在する障害物のレーダ情報、および車載カメラによって撮像された画像情報を最適に用いながら、当該障害物の位置および大きさ等の詳細情報を正確に認識する障害物認識装置を提供する。
【解決手段】本発明の障害物認識装置は、レーダを介して障害物のレーダ情報を取得するレーダ情報取得手段と、レーダ情報に基づいて障害物を第1障害物と第2障害物とに分類する障害物分類手段と、障害物が第1障害物に分類された場合、レーダ情報と画像情報とに基づいて障害物を認識し、障害物が第2障害物に分類された場合、レーダ情報に基づいて障害物を認識する障害物認識手段とを備える。
(もっと読む)
無線タグ距離算出システムおよび無線タグリーダ

【課題】無線タグの電池消耗を抑制しつつ、複数の無線タグリーダが無線タグとの間の距離をそれぞれ算出することができる無線タグ距離算出システムを提供する。
【解決手段】無線タグリーダ1Aは、タグコマンドの送信完了時点t3から、無線タグ2から送信されるACKの受信完了時点t10まで時間TAを計測し、計測した時間TAをブロードキャスト送信する。無線タグリーダ1Bは、タグコマンドおよびACKを受信(傍受)して、タグコマンドの受信完了時点t4からACKの受信完了時点t11までの時間TBを計測し、また、無線タグリーダ1Aから送信される時間データ(TA)を受信する。これら時間TA、TBと、予め記憶しているTtag、Tres、無線タグリーダ1Aと無線タグリーダ1Bとの間の距離D3とを用いて、無線タグリーダ1Bは、無線タグ2との間の距離D2を算出する。よって、無線タグ2と通信を行うことなく距離D2を算出できる。
(もっと読む)
近接センサ
【課題】感度を安定させ、静電気などによる外乱による計測値のエラーを回避することを可能とする近接センサを提供する。
【解決手段】近接センサ1aは、発振器2と、発振器2の信号に基づいて交流信号Eaを放射する送信アンテナ3と、交流信号Ebを受信する受信アンテナ4とを備える。また、近接センサ1aは、近接センサ1aは、被検査領域からの交流信号Ebを受信する受信アンテナ4と、送信アンテナ3と受信アンテナ4を電気的に接続する抵抗7を備える。抵抗7により、発振器2からの信号は移相される。さらに、近接センサ1aは、受信アンテナ4の出力を増幅する増幅器8と、発振器2の出力信号で、受信アンテナ4で受信した信号を位相検波する位相検波器9を備える。さらに、近接センサ1aは、位相検波器9の出力を平滑化するLPF(ローパスフィルタ)10と、出力端子11を備える。
(もっと読む)
レーダ装置
【課題】誤ペアリングの発生を防止するとともに、ビート信号のピーク周波数のうち、少なくとも1つのピーク周波数を抽出することができず、ピーク周波数のペアを生成することができない場合であっても、ターゲットまでの距離およびターゲットとの相対速度を得ることができるレーダ装置を得る。
【解決手段】ターゲット推定部20は、ビート信号のピーク周波数のうち、少なくとも1つのピーク周波数を抽出することができず、ピーク周波数のペアを生成することができない場合に、ターゲット確定部13において前回のサイクルで確定されたターゲット21、22までの距離ROおよびターゲット21、22との相対速度VOに基づいて、ターゲット21、22までの距離RNおよびターゲット21、22との相対速度VNを推定する。
(もっと読む)
レーダ装置
【課題】簡単な回路構成で安価なレーダ装置を得る。
【解決手段】送信信号を電磁波として放射し、目標物体5で反射した電磁波を受信信号として受信し、受信信号に基づいて、目標物体5までの距離を測定するレーダ装置1であって、送信信号と受信信号とを混合するミキサ32と、目標物体5までの距離に応じて、ミキサ32の電圧利得を制御する制御部4とを備えている。
(もっと読む)
位置検知システムおよび位置検知方法、信号計測装置
【課題】動局装置が通信フレームを基地局装置へ送信してから、その後に通信フレームを前記基地局装置から受信するまでの時間差と、基地局装置が移動局装置から通信フレームを受信してから、その後に通信フレームを移動局装置へ送信するまでの時間差とに基づいて、移動局装置と基地局装置との距離を算出し、移動局装置の位置を検出する位置検知システムにおいて、通信フレームのうちの開始フレームと終了フレームの時間差の計測精度を向上させる位置検知システムを提供する。
【解決手段】複数のカウンタで入力した識別番号付加済みの開始フレームのそれぞれの識別番号が一致しているかを判定し、一致していない場合には、開始フレームの受信タイミングの検出に利用したクロックから、終了フレームの受信タイミングの検出に利用したクロックまでに入力したクロック数に基づく時間差の算出の無効を示す信号を出力する。
(もっと読む)
レーダ装置
【課題】目標検出性能を低下させずに2次エコーを抑圧したレーダ装置を得る。
【解決手段】受信信号を生成する受信部6と、受信信号の位相補正を行う第1の2次エコー位相補正部7と、位相補正後の受信信号から第1のドップラ周波数成分を除去する第1の2次エコー除去部8と、除去電力を算出する2次エコー電力推定部16と、第1の2次エコー除去部8の出力信号の位相補正を行う第1の1次エコー位相補正部9と、位相補正後の受信信号から第2のドップラ周波数成分を除去する第1の地形エコー除去部10と、受信信号の位相補正を行う第2の1次エコー位相補正部11と、第3のドップラ周波数成分を除去する第2の地形エコー除去部12と、除去電力を算出する1次地形エコー電力推定部17と、不要波除去後の受信信号の位相補正を行う第2の2次エコー位相補正部13と、第4のドップラ周波数成分を除去する第2の2次エコー除去部14とを備える。
(もっと読む)
レーダ装置
【課題】ターゲットが移動する場合でも当該ターゲットからの反射波の信号における低レンジサイドローブ特性を維持し、複数のセクタレーダ間における干渉を低減する。
【解決手段】第1セクタレーダは、第1送信周期で第1符号系列を変調した信号、第2送信周期で第2符号系列を変調した信号、第3送信周期で第1符号系列を変調した信号、第4送信周期で第2符号系列を変調した信号を生成する。第2セクタレーダは、第1送信周期で第2符号系列を変調した信号、第2送信周期で第1符号系列と逆極性の第3符号系列を変調した信号、第3送信周期で第2符号系列と逆極性の第4符号系列を変調した信号、第4送信周期で第1符号系列を変調した信号を生成する。第1、第2セクタレーダは、生成された各信号を第1、第2送信アンテナからそれぞれ送信する。
(もっと読む)
自動水栓装置
【課題】電波センサを用いた自動水栓装置であって、デザイン自由度を確保でき、吐水及び止水タイミングが良好である自動水栓装置を提供する。
【解決手段】使用者の動作状態を検知するための電波センサと、連通管10内と水管20との間に形成された電波通過用空間と、電波を外部に放射するための電波放射口27と、電波放射口27から放射される電波の指向性を調整するための指向性調整手段と、電波センサの検出信号に基づいて吐水口26からの吐水と止水を行う制御部であって、所定値以上の信号値を有する検出信号に基づいて検知範囲を決定する制御部とを備え、指向性調整手段は、洗浄水Wによって電波放射口27から放射される電波の少なくとも一部を減衰させることによって、止水中よりも吐水中の検知範囲の方を小さくするように、電波を洗浄水Wに干渉させるように構成されている。
(もっと読む)
パルスレーダ装置
【課題】本発明は、パルスレーダ装置に関し、対象物との相対距離又は相対速度を演算するうえで、高い検出精度と遠方における速やかな検出とを両立させることにある。
【解決手段】パルス状の電波を送信する送信手段と、送信手段による送信電波の反射波を受信する受信手段と、を備え、送信手段による電波送信と受信手段による電波受信との関係に基づいて対象物との相対距離又は相対速度を演算するパルスレーダ装置において、対象物との相対距離又は相対速度を演算すべき検出範囲を複数に区切ったレンジビンのうち、対象物が存在する存在レンジビンを検出し、その存在レンジビンが検出された場合に、以後、上記検出範囲内の全レンジビンのうち対象物との相対距離又は相対速度を演算すべき要演算レンジビンを、上記存在レンジビンを含む周辺の一以上のレンジビン並びに上記検出範囲の端に存在する一以上のレンジビンのみに限定する。
(もっと読む)
ベースバンド増幅ユニット及びパルスレーダ装置
【課題】妨害信号を減衰させることができ、且つ、妨害信号を飽和させることなく、大きく反射波を増幅させるパルスレーダ装置を提供する。
【解決手段】送信制御信号を変調した送信パルス波をアンテナ3から送信した後、送信パルス波が対象物体に反射された反射波の待機モードに移行するパルスレーダ装置1に、ベースバンド増幅ユニット5が設けられる。ベースバンド増幅ユニット5は、反射波を増幅する第1反転増幅器52と、送信制御信号の立ち上がり時間前に遮断状態に切り替えられ、送信制御信号の立ち下がり時間で通過状態に戻り、第1反転増幅器52へ入力される反射波を通過させる第1スイッチ回路51と、第1スイッチ回路51が遮断状態になる前に遮断状態に切り替えられ、送信制御信号の立ち下がり時間で通過状態に戻り、第1反転増幅器52から出力された信号を通過させる第2スイッチ回路53と、を有する。
(もっと読む)
パラメータ検出器、レーダ装置、誘導装置、及びパラメータ検出方法
【課題】正確なドップラ周波数の検出をすることができるパラメータ検出器、レーダ装置、誘導装置、及びパラメータ検出方法を提供する。
【解決手段】パラメータ検出器は、キャリア周波数が異なる複数の周波数バンドからなる周波数ホッピングの信号がドップラシフトを受けて周波数が変化した受信信号について、複数サンプルのベースバンド信号に変換するベースバンド変換部と、前記ベースバンド信号を、各々フーリエ変換して、周波数スペクトルを生成するフーリエ変換部と、前記周波数スペクトルを、変換後の同一時刻ビン番号に関して、周波数バンド毎に前記キャリア周波数に対応して異なる参照時刻で逆離散フーリエ変換して変換サンプル列を得る逆フーリエ変換部と、前記変換サンプル列を用いて相関行列を生成し、超解像度法によりドップラ周波数を検出する周波数検出部と、を有する。
(もっと読む)
情報読取装置及びプログラム
【課題】複数の物品の配置順どおりに読み取りを行った場合に、全体に対してどの辺りに不具合が起きているかを適切に明示できるようにする。
【解決手段】制御部1は、複数の商品の個々から商品識別情報をRFID・R/W部7によって逐次読み取ると共に、その読取タイミングを検出して、商品識別情報及び読取タイミングを読取情報メモリM4に記憶させた後、在庫情報記憶部M2の内容と読取情報メモリM4の内容との比較結果に基づいて、商品毎に正常な読み取りが行われたか否かを判別し、全体に対してどの辺りに不具合が起きているかを適切に明示する。
(もっと読む)
無線周波数識別タグ位置測定方法及び装置
【課題】無線周波数識別RFIDタグ位置測定方法及び装置を提供する。
【解決手段】方法は、コンピュータが、RFIDリーダのアンテナを使用して複数の指定発射電力毎に線形配列となる対象タグを所定回数読み取り、各対象タグについて指定発射電力毎のアンテナによる読取が成功した回数を記録し、各対象タグについてのアンテナによる読取成功回数の合計を算出し、各対象タグ毎の読取成功回数の合計に対してソートすることにより各対象タグのアンテナに対する配列順序を特定し、各対象タグ毎のアンテナに対する正規化の読取確率を算出し、各対象タグ毎のアンテナに対する正規化の読取確率に基づいて、タグのアンテナに対する正規化の読取確率とタグのアンテナに対する距離との対応関係が記録される読取確率マップを検索することにより、各対象タグ毎の前記アンテナに対する距離を特定することを特徴とする。
(もっと読む)
センサの方位ずれ検出装置
【課題】前方物体検知センサの向きのずれを検出する。
【解決手段】自車両のヨーレートを検出するヨーレートセンサ30と、自車両の前方の物体を検知する前方物体検知センサ31と、前方物体検知センサ31により検知された物体が固定物であるのかを認識する前方物体認識部10と、前方物体認識部10により認識された固定物が自車両に対してその横方向に相対的に移動する横移動量を測定する横移動量測定部12と、ヨーレートセンサ30により検出されたヨーレート検出値と横移動量測定部12により測定された横移動量とに基づいて、前方物体検知センサ31の向きのずれを検出するずれ検出部13とを設ける。
(もっと読む)
MIMOレーダシステム、送信装置、受信装置及びMIMOレーダ信号処理方法
【課題】 複数のレーダ装置が遠隔に配置されている場合であっても、各レーダ装置で受信された受信信号を同一の成分同士で処理可能なMIMOレーダシステムと、このシステムで用いられる送信装置、受信装置及びMIMOレーダ信号処理方法とを提供する。
【解決手段】 MIMOレーダシステムは、複数の送信装置と、複数の受信装置と、処理サーバとを具備する。送信装置は、送信信号を送信する。受信装置は、原点及び直交軸をそれぞれが共有し、送信信号が目標で反射等された目標反射波を受信する。受信装置は、極座標信号生成部と、信号処理部と、6次元セルデータ処理部とを備える。極座標信号生成部は、目標反射波に基づいて極座標信号を生成する。信号処理部は、極座標信号を、6次元セルデータに変換する。6次元セルデータ処理部は、6次元セルデータを統合して受信結果を取得する。処理サーバは、前記複数の受信装置からの受信結果に基づいて目標を検知する。
(もっと読む)
位置教示システム
【課題】対象物及び携帯端末の構成が簡易であるとともに、携帯端末の大型化が抑制された位置教示システムを提供する。
【解決手段】カーファインダシステム3は、電子キー1に設けられた複数のアンテナ14a,14b,14cから車両2側で各発信アンテナの信号が区別可能に発信された探索信号Sseを、車両2に設けられたアンテナが受信することで、車両2のアンテナから発信された探索信号Sseを電子キー1が同時受信したかのように取り扱うとともに、探索信号Sseから到来方向推定法によって電子キー1に対する車両2の位置を推定演算する位置推定部21bを備える。そして、カーファインダシステム3は、位置推定部21bが演算した位置情報を車両2から発信し、位置情報を電子キー1が受信して表示部19によって使用者に教示する。
(もっと読む)
目標物速度特定装置、目標物速度特定プログラム及び目標物速度特定方法
【課題】少ない計算量で高精度に目標物の速度を特定することを目的とする。
【解決手段】刻み幅特定部3は、SAR搭載機の速度vpと距離R0と電波の波長λと合成開口時間τと目標物のアジマス方向の予測速度va’とを用いて表された振幅値V0vazの関数に、SAR画像データの観測条件であるSAR搭載機の速度vpと距離R0と電波の波長λと合成開口時間τとを入力し、予測速度va’に対応する振幅値V0vazを計算する。刻み幅特定部3は、振幅値V0vazが所定の値以上になるアジマス方向の予測速度va’の範囲を処理装置により特定し、特定した範囲の幅以下の幅を刻み幅Δva1とする。そして、特定処理実行部は、刻み幅Δva1を用いて、目標物のアジマス方向の速度を処理装置により特定する。
(もっと読む)
精測進入レーダ及びレーダ表示処理方法
【課題】目標検出処理により検出された目標を運用者が容易に識別できるようにする。
【解決手段】精測進入レーダは、電子走査式空中線1からレーダ波を送信し、その反射波を受信するレーダ送受信機2と、反射波の受信信号をもとに目標を検出し、検出された目標のうち予め決められた上限数以下のターゲットデータを出力する目標検出部33と、受信信号からレーダビデオデータを作成し、目標検出部33により検出された目標の位置情報に基づいて、レーダビデオデータに検出フラグを付加するビデオ作成部32と、レーダビデオデータをもとに検出フラグの有無に応じてレーダビデオの表示態様を変更し、ターゲットデータに基づいてシンボルを重畳表示するレーダ表示部5とを具備する。
(もっと読む)
レーダ装置
【課題】レーダ装置において、自車両の走行環境が閉空間であるか否かを、当該レーダ装置単体で精度良く判定すると共に、物標の認識精度が低下することを防止すること。
【解決手段】取得したビート信号のパワースペクトルを求め(S140)、そのパワースペクトルから検出した周波数ピークに従って物標候補を認識する(S170)。さらに、パワー積分値が基準閾値以上であれば、走行環境が閉空間であるものと判定する(S180)。基準停止物ペアから、規定された方向に沿って接続基準距離の範囲内に存在する停止物ペアを順次接続してグループ化した停止物群によって形成される領域を道路端として認識する(S190)。ただし、接続基準距離は、走行環境が閉空間であれば、走行環境が開放空間であるときに比べて、短い距離に設定される。履歴追尾処理、物体認識処理(S200,S210)により、移動物体を認識する。
(もっと読む)
281 - 300 / 2,290
[ Back to top ]