
Fターム[5J070AK40]の内容
レーダ方式及びその細部 (42,132) | 目的(効果) (6,033) | その他 (267)
Fターム[5J070AK40]に分類される特許
81 - 100 / 267
電波センサ
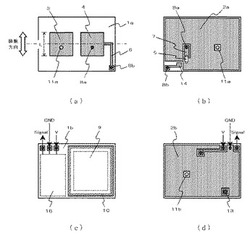
【課題】少電力にてセンサ前方に存在する被検知体の有無や移動状態を精度良く検出するコンパクトな電波センサを提供する。
【解決手段】送信信号を生成する発振回路9と、誘電体からなる基板1aと、基板1aの一方の表面または内部の略全面に形成された送信信号のグランドとして作用する接地電極2aと、基板1aの他方の表面に形成された、送信信号を電波ビームとして前方に放射する矩形状の送信電極3と、送信電極3から放射され被検知体に衝突し反射して戻ってきた電波ビームを受信信号として受信する矩形状の受信電極4と、受信電極4に接続され、受信電極4にて受信した受信信号を検波する検波素子5と、検波素子5にて検波された受信信号を外部に出力する出力線路6とを備え、出力線路6を受信電極4の励振方向と平行な端辺に接続する。
(もっと読む)
チャープ信号発生装置

【課題】 DDSを用いて、低雑音チャープ信号と広帯域チャープ信号とを出力するチャープ信号発生装置を得る。
【解決手段】 DDSから出力されるチャープ信号を分周する分周器と、分周器により分周されたチャープ信号と第二局部発振信号発生器の出力信号を周波数合成するミクサとを有した分周系と、DDSから出力されるチャープ信号を逓倍する逓倍器を有した逓倍系と、経路切換え信号に基づいて分周系の出力信号と逓倍系の出力信号を時系列に順次切換えて出力するスイッチを設けることで、所定のデューティ比で低雑音チャープ信号と広帯域チャープ信号を得る。
(もっと読む)
無線タグ距離測定装置および無線タグ距離測定システム
【課題】無線タグ距離測定装置において、距離測定を行うための事前処理を容易にすることを目的とする。
【解決手段】無線タグ距離測定装置10は、拡散処理が施されていないパルス変調信号を送信する。各無線タグは、無線タグ距離測定装置10から送信されたパルス変調信号を受信する。そして、自らに固有に割り当てられたPN符号によってパルス変調信号に拡散処理を施し、拡散処理後の信号を拡散パルス変調信号として送信する。無線タグ距離測定装置10は、各無線タグから送信された拡散パルス変調信号に基づいて各無線タグの固有割り当てPN符号を検出する。無線タグ距離測定装置10は、測定対象PN符号記憶部20に記憶されているPN符号を用いて無線タグまでの距離を測定する。
(もっと読む)
マイクロストリップアンテナ
【課題】少電力にてセンサ前方に存在する被検知体の有無や移動状態を精度良く検出するコンパクトな電波センサに適したアンテナを提供する。
【解決手段】一方の表面または内部の略全面に送信信号のグランドとして作用する接地電極2aが形成された誘電体からなる基板1aの他方の表面には、少なくとも送信信号として電波ビームを前方に放射する送信電極3と、送信電極3から放射され被検知体に衝突し反射して戻ってきた電波ビームを受信信号として受信する受信電極4が形成され、受信電極4には、受信電極4にて受信した受信信号を検波する検波素子5と、検波素子5にて検波された受信信号を外部に出力する出力線路6が接続される。矩形状の送信電極3および受信電極4は、励振方向と平行な端辺の長さが励振方向と直交する端辺の長さと同一または短く、且つ受信電極4の共振周波数は送信信号の周波数よりも高く受信電極4が導波器として作用する。
(もっと読む)
レーダシステム
【課題】内部のセンサから入力される情報に加え、外部から入力される情報を統合して表示し、優れた拡張性を有するレーダシステムを提供する。
【解決手段】内部センサ3と、外部から入力される情報を受け付ける外部入力インタフェース部2と、内部センサ3および外部入力インタフェース部2から入力される情報を蓄積するコンタクトデータベース4と、コンタクトデータベース4に蓄積された情報を表示する表示端末5とを備え、コンタクトデータベース4は、内部センサ3および外部入力インタフェース部2から入力される情報に基づいた個別テーブルを蓄積する複数の個別データベース42,43と、複数の個別データベース42,43に蓄積された個別テーブルを結合して結合テーブルを生成するテーブル結合処理部41と、テーブル結合処理部41において生成された結合テーブルを蓄積する結合データベース44を備える。
(もっと読む)
適合領域検出装置
【課題】二次元以上の領域を検出する場合でも、演算の場合分けを行うことなく、高速に適合な領域を検出することができるようにする。
【解決手段】方向を識別する再帰識別子と方向別の各端点の位置に対応する特徴からなる再帰索引レコードを生成する再帰索引生成部1と、相互に領域の重複関係がある複数の再帰索引レコードを取得し、複数の再帰索引レコードから新たな再帰索引レコードを演算する再帰索引演算部4とを設け、再帰索引検索部5が再帰索引蓄積部2に蓄積されている再帰索引レコードの中から、特徴に関する検索条件に合致する再帰索引レコードを検索する。
(もっと読む)
追尾処理装置及びプログラム
【課題】センサの多様化、複数化に伴い、従来のMHTアルゴリズムでは入力される目標数の増加に伴う航跡数の増大により、航跡の状態更新の計算負荷が高くなり、特に高クラッタ下においては、要求される時間内に処理を完了することが困難になる。また、目標が密集してしまうと、MHTアルゴリズムのクラスタ処理の効果がなくなってしまうことがある。
【解決手段】MHT処理部4と複数の航跡管理部5を設け、MHTアルゴリズムで処理していた航跡の代替となる代理航跡を生成し、複数の航跡管理部5に航跡を分配して航跡の状態更新および保持を行うことにより、航跡の状態更新の計算負荷を分散させることにより、時間内での処理完了を可能とする。特に、MHT処理部4においてn−Best解探索を実施している間に、複数の航跡管理部5が航跡の状態更新を行うことで、処理時間を短縮する。
(もっと読む)
レーダ信号処理装置およびレーダ信号処理方法
【課題】同一の目標物に対して処理が重複する冗長性をなくす。
【解決手段】受信信号を時間方向でフーリエ変換しドップラー周波数次元のデータに変換する時間フーリエ変換部16と、変換後のデータからピーク信号を検出するピーク検出部17と、ピーク信号に相当するドップラー周波数次元のデータから共分散行列を生成する共分散行列生成手段と、共分散行列に含まれる波の数を抽出する波数推定部19と、波数推定部19による演算結果を用いて高分解能により目標物までの距離を算出する距離算出部22と、当該距離から隣接する距離ゲートからの漏れ込み波かどうかの判定を行う漏れ込み波判定部23と、漏れ込み波と判定されたデータの処理の優先度を下げる優先度判定部20とを備えたレーダ信号処理装置で、これらの一連の処理の処理時間が制限時間を超えた場合に途中でその処理を打ち切る。
(もっと読む)
パルスレーダ装置、パルスレーダ装置を利用した情報伝送方法、及びパルスレーダ装置を利用した情報伝送システム
【課題】 シンプルかつ低コストで実現可能な構成により、物標の存在の検出すると同時に、情報伝送を行うことができるパルスレーダによる情報伝送方法を提供する。
【解決手段】 本発明では、情報伝送を行わない従来のパルスレーダの場合に比べ、そのパルスの位置、すなわちパルス間隔を微小に変化させることで、本来のパルスレーダの動作には影響は与えずに、パルスレーダから送信されるパルス系列に情報をのせる。例えば、入力信号が“0”の場合は所定の繰返し周期Tのパルス波を出力するが、入力信号が“1”の場合には繰返し周期に比べ微小時間tdだけ長くなったパルス間隔でパルス波を出力するといった方法で、情報伝送を行う。
(もっと読む)
移動局の状態検出システム
【課題】移動局を設けた設置対象の状態を推定する。
【解決手段】移動局タグTは偏波方向が固定であるタグアンテナ32を備える。固定局リーダRは、互いに交差する2つの偏波面を生成可能な備えたリーダアンテナ12と、電波信号の受信時刻を検出する到来時間検出部19と、リーダアンテナ12の2つの偏波方向における受信信号強度をそれぞれ検出するRSSI部17とを備える。管理サーバSは、到来時間検出部19で検出した受信時刻に基づき移動局タグTから固定局リーダRまでの距離を検出し、かつRSSI部17で検出した2つの偏波方向での受信信号強度に基づき移動局タグTの姿勢を検出し、それら距離及び姿勢検出結果に応じ移動局タグTの状態判定を行う。
(もっと読む)
レーダ装置
【課題】 航空機搭載レーダにおいて、近距離目標の捜索では、より早く正確に目標を捕捉することが求められるが、従来はペンシルビーム形状のアンテナパターンを用いた捜索を行なっていたので、目標を捕捉するまでに多くの時間を要していた。
【解決手段】 方位方向の捜索にはファンビームを行い、目標を検知した方位にてΔビームを用いて上下方向の捜索を行い、受信電圧から求められる角度誤差をもとに、目標の方位および上下方向の存在範囲を絞った後、ペンシルビームにより目標捕捉の捕捉を行う。
(もっと読む)
到来方向推定装置、到来方向推定方法および到来方向推定プログラム
【課題】到来方向の推定を高速かつ高精度に行うこと。
【解決手段】N個のセンサが受信した目標からの到来信号より、v1〜vNで表されるN個のベースバンド信号ベクトルを生成する信号ベクトル生成手段と、1≦MかつM≦(N−1)/2なる自然数Mを行の次元として優先的に定め、前記信号ベクトルの部分ベクトルv1〜vN−1から、(N−M)×M次の行列Rf1、Rf2、Rb1およびRb2のうち、少なくとも1つの行列を生成するHankel行列生成手段と、前記行列Rf1、Rf2、Rb1およびRb2のうち少なくとも1つの行列を用いて行列Rを生成し、前記行列RをR=[R1⊥R2]Tによって2つの部分行列R1およびR2に分割し、前記部分行列R1とR2とから前記到来信号の到来方向を推定する推定手段と、を具備する到来方向推定装置、方法およびプログラムである。
(もっと読む)
レーダターゲットシミュレータ装置
【課題】ターゲットを擬似する電波信号の周波数帯域に依存しないで広帯域化が図れるレーダターゲットシミュレータ装置を得ること。
【解決手段】電光変換器3は擬似信号発生装置2が出力するターゲットを擬似する電波信号と波長可変光源4が出力する光信号とに基づき、擬似信号発生装置2が出力する電波信号を搬送する模擬光信号を生成する。アレー導波路グレーティングファイバ6は模擬光信号を波長に応じて分波し、ファイバアレー7を介して複数の光電変換器8の中の対応するものへ送出する。光電変換器8は受け取った模擬光信号から電波信号を復調して対応するアンテナ素子9に出力する。つまり、ターゲットを模擬する電波信号をアンテナ素子まで光信号で搬送する過程で、その搬送波となる光信号の領域にてターゲットの移動模擬を制御する。ターゲットを擬似する電波信号の周波数帯域に依存しないで広帯域化が図れる。
(もっと読む)
DME地上装置
【課題】構成簡易にして回復時間を確実に測定することの可能なDME地上装置を提供すること。
【解決手段】高速PINスイッチを用いた減衰器40により、試験用の微弱なパルスペアと、これにマイクロ秒オーダで先行する強大なシングルパルスとをDME装置内部で生成することが可能になる。これにより外付けの複雑な試験用計測器などを不要にでき、回復時間の測定を容易に行うことができるとともに、調整時間の削減及びコスト低減が可能となる。これらのことから、構成簡易にして回復時間を確実に測定することの可能なDME地上装置を提供することが可能となる。
(もっと読む)
レーダシステム
【課題】レーダシステム起動時でも早期に物体検出を行う。
【解決手段】。パルスレーダ1は、外部へ送信パルスを送信し、ターゲットで反射された送信パルスを受信波形として受信する。記憶部2は、レーダシステム10の近傍に物体が存在しないとみなせる状態において、パルスレーダ1が受信した基準波形を記憶する。入力部3は、レーダシステム10の起動時において、パルスレーダ1が受信した入力波形を取得する。比較部4は、記憶部2に記憶された基準波形と、入力部3で取得された入力波形との比較結果に応じて、レーダシステム10の起動時における物体の有無を検出する。
(もっと読む)
探知測距装置および探知測距方法
【課題】探知測距装置において、角度推定の前段に行われる目標数推定の計算負荷を軽減し、且つ、推定精度を向上させる。
【解決手段】擬似空間平均共分散行列生成部104b−6は、Rf1、Rf2、Rb1、Rb2から、適切な行列を一つ選択するか、適切な行列を2つ以上選択して組み合わせて、擬似空間平均共分散行列Rを生成する。擬似空間平均共分散行列エルミート共役積生成部104c−1は、目標数推定用行列RRHを生成する。目標数推定用行列分解部104c−2は、RRHにLU分解を施して下三角行列Lと、上三角行列Uとに分解する。指標生成部104d−1は、この上三角行列Uの要素を用いた指標を生成する。指標パラメータ走査処理部104d−2は、指標生成部104d−1によって生成された指標を用いて目標数mを推定する。
(もっと読む)
レーダ装置
【課題】物標が存在する可能性が高い場合に、物標が存在すると判定するタイミングを早めることができるレーダ装置の提供。
【解決手段】レーダ波を送信する送信部と、物標で反射されたレーダ波の反射波を受信して受信信号を発生する受信部と、受信信号と送信信号からビート信号を生成するビート信号生成部と、ビート信号のピーク周波数を抽出しビート信号のピーク周波数におけるピーク強度を求める周波数解析部と、ピーク周波数およびピーク強度に基づき、物標の存在確率を測定サイクル毎に求める存在確率算出部と、算出された存在確率が所定値に達したとき、物標が存在すると判定する存在判定部とを備え、存在確率算出部は、ビート信号のピーク強度が第1の閾値以上第2の閾値未満(第1の閾値<第2の閾値)であるとき存在確率を第1の値で増加させ、ビート信号のピーク強度が第2の閾値以上であるとき存在確率を第2の値(第1の値<第2の値)で増加させる。
(もっと読む)
レーダ装置
【課題】機械走査方式のレーダ装置における受光素子の数を低減して、装置のコストダウン、小型化を図ることが可能な機械走査方式のレーダ装置を提供する。
【解決手段】アンテナをモータで往復動させて走査する機械走査方式のレーダ装置であって、アンテナの反転、振り角をスリット板8と発光素子と受光素子を備えるエンコーダ7で検出する機械走査方式のレーダ装置において、エンコーダ7には、発光素子と、受光素子28を設け、スリット板8に設けるスリット4は、スリット板8の中心Cに対して左方向と右方向とで、パターンを非対称とした。パターンを非対称とするには、スリット板8の左端と右端でスリット数を変える、スリットの幅を左右で変える、等がある。
(もっと読む)
センサ統制システム
【課題】探知覆域の組合せ数が増大した場合でも計算機リソースの制限を考慮して探知覆域の最適化処理の高速化および効率化を図る。
【解決手段】探知覆域算出部は、同一センサに対する各探知性能値テーブルのメッシュ配列を分割した各ブロックにおける所定位置の1メッシュのみを対象として各テーブルの探知性能値を加算し、全センサにおいて加算値が最良のメッシュを持つセンサを選択し、当該センサにおいて、最良メッシュを含む近傍の複数メッシュを対象として対応する各テーブルの探知性能値をそれぞれ加算し、その加算値が最良なメッシュを選択してそのメッシュの方位・仰角を当該センサの探知覆域の方位・仰角と決定し、決定した方位・仰角に基づいて該当センサの距離覆域を算出し、算出した距離覆域と決定した方位・仰角に基づいて該当センサの覆域形状を算出する。
(もっと読む)
レーダー装置
【課題】低い演算負荷で測定範囲の対象物との相対速度や相対距離などを測定することができるレーダー装置を提供する。
【解決手段】測定範囲内に存在する対象物で反射した反射波のレベルを予め定めた閾値と比較する。そして、予め定めた閾値以上となる反射波のみに基づいて対象物との相対距離として測定し、当該反射波をフーリエ変換処理することによってドップラー周波数を算出し、算出したドップラー周波数に基づいて対象物との相対速度を算出する。
(もっと読む)
81 - 100 / 267
[ Back to top ]