
Fターム[5J083AB13]の内容
音波、超音波を用いた位置、速度等の測定 (14,323) | 用途 (922) | 衝突防止 (295)
Fターム[5J083AB13]に分類される特許
81 - 100 / 295
超音波センサ
【課題】 従来の防滴型の超音波センサを利用して、感度、音圧、指向性の向上と、水滴による性能低下を防止するとともに、目的とする所望の特性を容易に得ることのできる超音波センサを提供することを目的とするものである。
【解決手段】
円筒状のケース内部に圧電素子を備えて密閉してなる防滴型の超音波素子と、該超音波素子をホーン型反射板の中央部に備えてなる防滴型の超音波センサにおいて、該超音波素子の前面に前面反射板を備え、該前面反射板は、中央の稜線部から左右の端部に向かって後退傾斜してなる山型面からなり、該稜線部が該超音波素子の前面に対向して備えられるとともに、該稜線部と該超音波素子の前面との間に微細な間隙を備えて構成して、超音波素子と空中との振動インピーダンスのマッチングを得ることが可能となり、開放型超音波センサと同等の良好な中央部感度(S/N比)、指向性特性、残響特性を得ることを可能とした。
(もっと読む)
超音波測定装置及び超音波信号の評価方法
本発明は、受信装置(14)と比較装置(101)と評価装置(112)とを備えた超音波測定装置に関する。受信装置は、車両固有の超音波送信器及び/又は外部の超音波測定装置から受信した超音波信号の周期持続時間の時間経過に関する測定セットを決定する。比較装置は、決定された測定セットの少なくとも一つの基準セットからの偏差に関する比較情報を決定する。評価装置は、決定された比較情報を考慮して、超音波送信器から送出された信号形状、受信装置と外部の超音波送信器との間の相対速度、受信装置と車両固有の超音波送信器及び/又は外部の超音波測定装置との間の伝送経路内に存在する少なくとも一つの反射性の対象の相対速度、及び/又は、少なくとも一つの反射性の対象の形状の特徴的指標に関する情報を決定する。更に本発明は、超音波信号を評価するための方法に関する。 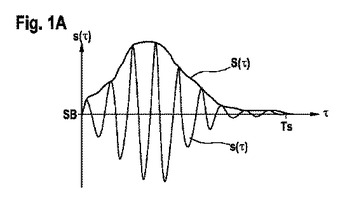 (もっと読む)
(もっと読む)
位置決定システム
本発明は、オブジェクト(2)の位置を決定するための位置決定システム(201)に関する。第一位置検出ユニット(205)が、送受信ユニット(203、214、216、217)によってオブジェクト(2)と基準位置に対して知られている転送位置との間で転送される放射に基づいて、オブジェクト(2)の第一の位置を検出する。第二位置検出ユニット(35)が、オブジェクト(2)の加速度および決定された前記第一の位置に基づいて第二の位置を検出する。出力ユニット(12)が、第一の位置および第二の位置の少なくとも一つを出力する。放射の転送が遮られても、第二の位置が出力ユニットによって出力されることができる。さらに、第一の位置が、第二の位置を決定するまたは第二の位置を更新するための初期値として使用されることができる。これはオブジェクトの位置決定の品質を改善する。 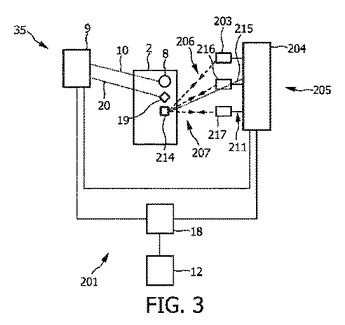 (もっと読む)
(もっと読む)
超音波送受波器の取付け構造

【課題】超音波送信後のバンパーから振動子へ伝わる残響振動を短時間で収束させて、近距離の障害物の存在を検出することのできる超音波送受波器の取付け構造を提供する。
【解決手段】振動子2から放射された超音波の反射波を受信して障害物の存在を検知する超音波送受波器において、バンパー11の裏面11aに設けた振動子取付け部12に対して、振動子2を、弾性部材14を介在させて取り付けた。
(もっと読む)
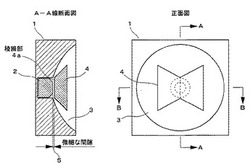
超音波センサの車体への取付け角度計測方法及びその計測システム
【課題】超音波センサのセンサ軸の車体への取付け基準方向に対する取付け角度を定量的にかつ簡便に計測する超音波センサの車体への取付角度計測方法を提供する。
【解決手段】 本発明の超音波センサの車体への取付角度計測方法は、
擬似路面部材2を用いて超音波センサ5の取付け基準方向SRに対する上下方向の傾きを計測するステップと、
対称性の計測対象4A、4Bを用いて超音波センサ5の取付け基準方向SRに対する左右方向の傾きを計測するステップとからなる。
(もっと読む)
XYステージ
【課題】プラテン上を2次元移動するスライダの位置を制御するXYステージにおいて、光軸調整に高い精度が要求される反射型センサを用いることなく、スライダの接触・衝突を防止できるようにする。
【解決手段】プラテン上の平面を2次元移動するスライダの位置を制御するXYステージであって、スライダに、他物体が前記平面上の所定の基準距離内に存在していることを検出する超音波センサが配置され、超音波センサが、基準距離内に他物体が存在していることを検出すると、超音波センサが配置されているスライダの移動を停止させる制御部を備える。
(もっと読む)
超音波送受信器
【課題】超音波送受信器の意匠性を向上させる。
【解決手段】超音波送受信器3に塗装可能な樹脂で形成された、同心円上に重ねられた円筒からなる有底円筒状のカバー4を取り付ける。カバー4の構造的特徴によって、超音波受信器3にカバー4を接着した場合でも超音波送受信器の感度低下やノイズ増加を防ぐことができる。カバー4の内部を吸音材または低い硬度の振動抑制材料5で埋めることで、残響とノイズの増加をさらに抑えることができる。カバー4を超音波送受信器3や取り付ける対象物6と同じ色に塗装する。
(もっと読む)
超音波送受波装置
【課題】 超音波の送波と受波とを行う超音波送受波装置でありながら、送波特性も受波特性も良好な超音波送受波装置を提供する。
【解決手段】 超音波送受波装置は、複数の送波用圧電素子と、複数の受波用圧電素子と、超音波伝達部材と、を備える。送波用圧電素子は、厚み方向の寸法が、径方向の寸法よりも大きくされ、厚み方向に、所定周波数で機械的に共振する特性を有し、電気的に互いに並列に接続されてなる。受波用圧電素子は、厚み方向の寸法が、径方向の寸法よりも大きくされ、厚み方向に、所定周波数で機械的に反共振する特性を有し、電気的に互いに並列に接続されてなる。
(もっと読む)
障害物検出装置
【課題】複共振マイクロフォン21を用いて、遠距離モードと近距離モードとを切り替えることができ、この2つの異なるモードを実現するために、ハードウエア的またはソフトウエア的に共用化を行う。
【解決手段】マイクロフォン21に、高周波数駆動信号と低周波数駆動信号を提供する回路部23を備え、この回路部23を制御する制御手段3を備え、回路部23には、単一の周波数調整回路32から出力された超音波パルス信号をマイクロフォン21に昇圧して印加するトランスを備え、少なくとも一部が遠距離モード近距離モード共用のマイク駆動回路33を備え、車体上で隣り合って配置されたマイクロフォン同士は、一方が遠距離モード送信時は、他方は、近距離モード送信になるように駆動される。
(もっと読む)
障害物検出装置
【課題】外来ノイズとセンサ送受信の混信による誤報防止を図りながら、検出エリアの変動を極力抑制する障害物検出装置を提供する
【解決手段】マイクロフォン21及び回路部23を持つセンサ5は、基準周波数モードまたは外来ノイズを避けるための前記基準周波数モードとは異なる周波数で超音波を送波するシフト周波数モードのうち、いずれかに周波数調整回路32で切替えて、超音波を送波するとともに、マイク駆動回路33での超音波の音圧またはゲイン調整回路36での受信感度を、基準周波数モードの送信時からシフト周波数モードでの送信時とで変更する。これにより、外来ノイズで誤動作し難く、かつ検知エリアの変更を抑制することが出来る。
(もっと読む)
障害物検出装置
【課題】障害物の誤検出を抑制することのできる障害物検出装置を提供する。
【解決手段】制御手段に、降雨量と閾値とを比較する降雨量判定手段425、720と、ノイズの有無を判定するノイズ判定手段430、725の少なくともいずれか一方を備え、降雨量判定手段425、720にて降雨量が閾値より大きいと判定した場合には降雨量が閾値より小さいと判定した場合と比較して、もしくは、ノイズ判定手段430、725にてノイズがあると判定した場合にはノイズがないと判定した場合と比較して、指向性を狭くする信号を超音波センサ5に対して送信させる。
(もっと読む)
障害物検知装置
【課題】隣り合う2つの超音波ソナーの双方で障害物検知が行えるエリアを広げ、広範囲で障害物の位置特定が行えるようにする。
【解決手段】超音波ソナー2a、2bのいずれか一方を送受信モードにすると共に他方を受信モードとし、かつ、受信モードに設定する方に関しては受信感度を高めるようにする。これにより、隣り合う2つの超音波ソナー2a、2bの双方で障害物検知が行えるエリアD2を広げることが可能となり、広範囲で障害物の位置特定を行うことが可能となる。
(もっと読む)
車両と物体との間の衝突防止を助けるための方法および装置
【課題】車両と物体との間の衝突防止を助けるための方法および装置に関し、物体が車両の運転者の視界から隠れている場合等であっても、物体からの音響信号を受信して物体の位置を検出し、車両と物体との間の衝突防止を助けることを目的とする。
【解決手段】本発明の方法および装置が、車両により支持されているマイクロホンを用いて、物体からの音響信号を受信し、車両および物体の環境に関連するトポロジ的データを用いて、環境の音響モデルを生成し、音響信号および環境の音響モデルを用いて、物体の位置を決定する。車両および物体の環境は、車両から物体を直接見ることを妨げるような構造を含む。
(もっと読む)
物体検出装置
【課題】 送信波を送信してから物体が存在すると判定するまでの応答性を良くすることのできる物体検出装置を実現する。
【解決手段】 送信素子Aから送信され、受信素子C,Dにより受信された受信波は、それぞれ障害物以外からの反射波である不要波RC1〜RC3,RD1〜RD3と、障害物反射波RC4,RD4とから構成される。振幅(電圧)が閾値Vthを超えており、かつ、その閾値Vthを超えたときの受信時間の受信素子C,D間における受信時間差Δtが規定時間ta以下である障害物反射波RC4,RD4を検出したときに障害物が存在すると判定する。
(もっと読む)
障害物検出装置
【課題】簡単且つ安価な構成で至近距離まで接近することなく輪どめなどの低い障害物を判定できるようにする。
【解決手段】自動車10の後部のバンパーよりも高い位置に送受信機3を配置し、後方に向けて超音波を送信して検出対象物からの反射波を受信する。このとき、受信する反射波のピーク値を検出して記憶する。自動車10が後方に移動するに従ってピーク値が変化するのをピーク値差分として算出し、検出エリアS内から外れる路面付近障害物Pの場合にはピーク値差分が「負」となることで判定できる。
(もっと読む)
超音波センサ
【課題】
超音波を利用して物体を検知する超音波センサおいて、マイクロフォンに雪や霜等の異物が付着した時でも、残響時間延長による影響を排除して、障害物を検知可能な超音波センサを提供する。
【解決手段】
超音波を送受信するマイクロフォン101と、超音波を送信させるための送信回路103と、超音波を受信することにより得られる受信信号を増幅する増幅回路104と、増幅回路103により得られた受信信号に基づいて、物体を検知する検知回路105と、超音波を送信してから、検知回路105が検知を開始するまでの検知開始時間を設定する検知開始時間制御回路106と、マイクロフォン101の温度およびマイクロフォン101周辺の雰囲気温度を検知する温度検知回路107とを備え、検知開始時間制御回路106は、温度検知回路107により得られた温度に応じて、検知開始時間を制御する。
(もっと読む)
車両用周辺監視装置
【課題】路面反射による障害物の誤検知影響分を取り除くことで、車両周辺に存在する障害物の検知精度の向上を図ることができる車両用周辺監視装置を提供すること。
【解決手段】車体に取り付けられた各ソナー7,8,9,10と、各ソナー7,8,9,10から発射した球面送信波の反射波を捕らえて車両周辺に存在する障害物を検知する障害物検知コントローラ12と、を備えた車両用周辺監視装置において、各ソナー7,8,9,10の取り付け姿勢を検出する姿勢センサ11を設け、障害物検知コントローラ12は、検出されたソナー姿勢に基づき、路面からの反射波を取り除く閾値パターンの形状を、ソナー姿勢によって変化する路面反射強度特性に沿った形状に設定し、捕らえた反射波による路面反射強度特性から設定した閾値パターンを取り除いて障害物を検知する。
(もっと読む)
超音波センサ
【課題】 送波と受波を行う超音波センサであって、超音波の良好な放射強度及び受波感度を有しながら、位置決めなどの取り扱いや設置が容易な超音波センサを提供する。
【解決手段】 超音波の送受波を行う超音波センサ10は、厚みTaの薄肉部12、及び、薄肉部12と一体とされ、これよりも厚い厚みTbの厚肉部13を有する圧電素子11と、薄肉部12を挟む薄肉部電極17と、厚肉部13を挟む厚肉部電極18と、を備える。圧電素子11は、薄肉部12の厚みTaと厚肉部13の厚みTbとを、薄肉部12における共振周波数fraと厚肉部13における反共振周波数fabとが等しくなる関係とされている。
(もっと読む)
車間距離検出装置および車速制御システム
【課題】超音波を用いた車間距離検出装置において、計測の精度を向上させる。
【解決手段】自車200の前部に設置され、先行車300に対して超音波Sを送信するとともに、先行車300で反射して戻った超音波S′を受信する超音波送受信機10と、超音波Sが超音波送受信機10から送信されてから、反射波としての超音波S′が受信されるまでの経過時間ΔTを計時する計時手段30および経過時間ΔTに基づいて先行車300との間の車間距離Lを算出する距離演算部50を有する距離算出装置20と、を備え、距離算出装置20は、反射波として受信した超音波S′のうち、路面(500)から反射して受信したノイズ成分(S2′)を除去するノイズ信号除去手段40を備え、距離演算部50は、ノイズ信号除去手段40によって除去された後の超音波S′についての経過時間ΔTに基づいて、車間距離Lを算出する。
(もっと読む)
車両用周辺監視装置
【課題】データの送信回数を少なくすることで通信の負荷を軽減し、短時間で障害物の検知・報知処理を行うことが可能な車両用周辺監視装置を提供する。
【解決手段】車両の前後に各4個ずつ設けられ、各設置位置に応じた識別IDを記憶すると共に、超音波を送受信し、障害物からの反射波に基づいて障害物までの距離を導出する超音波センサ11〜18と、超音波センサ11〜18へ動作指示信号を送信し、更に超音波センサ11〜18から距離情報を取得して、それに応じて警報を発する制御装置2とを備え、動作指示信号は、複数の超音波センサ11〜18の識別IDからなる識別ID情報と、複数の超音波センサ11〜18に対して指示する動作内容を示す動作モード情報とを含み、超音波センサ11〜18は動作指示信号に含まれる識別ID情報と自己の識別IDとが一致する場合に動作指示信号に含まれる動作モード情報に基づいて動作する。
(もっと読む)
81 - 100 / 295
[ Back to top ]