
Fターム[5J083AD04]の内容
音波、超音波を用いた位置、速度等の測定 (14,323) | 測定量 (1,723) | 距離 (553)
Fターム[5J083AD04]の下位に属するFターム
Fターム[5J083AD04]に分類される特許
101 - 120 / 474
超音波による波浪計測方法および波浪計測システム
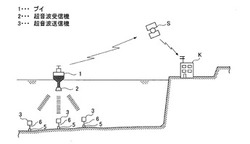
【課題】波浪が高い場合でも、精度良く計測し得る超音波を用いた波浪計測方法を提供する。
【解決手段】海面に係留されたブイ1の海面下に設けられた超音波送受信機2から海中に超音波を発信すると共に、ブイの下方の海面下に配置された3つのトランスポンダ3からの超音波を時刻信号と一緒に受信し、トランスポンダから発信した超音波を受信するまでの片道伝播時間に基づき各トランスポンダと超音波送受信機との間の距離を検出し、この距離データにハイパスフィルタ処理を施して短周期変動成分を抽出し、超音波送受信機のトランスポンダに対する方位角及び俯角を係数とする超音波送受信機の三次元座標軸の変位を未知数とする式が上記抽出された短周期変動成分に等しくなるようにした三元一次方程式を各音波中継器毎に作成すると共に、この三元一次連立方程式を解いて少なくとも短周期変動成分の高さ方向の変位を求めて波浪高さを得る方法である。
(もっと読む)
位置検出装置、位置検出方法およびプログラム

【課題】被検出部周辺の環境を考慮した被検出部の音速の算出を行い、位置の検出対象とする部分付近の音速をできるだけ正確に測定し、それを用いての位置の検出精度を高める。
【解決手段】ロボットハンド101の先端部分104に超音波送信装置を配置し、さらに先端部分104を含むことが可能な多面体131〜133を設定し、それらの頂点に超音波送受信装置111〜126を配置する。先端部分104の位置検出にあたり、先端部分104に近い頂点を特定点として選択し、この特定点に向かう他の頂点からの経路の音速を算出する。この音速に基づいて、先端部分104から特定点への経路における音速を算出し、この音速の値と、先端部分104と特定点との間における超音波の伝播時間とに基づいて、先端部分104の特定点からの距離を算出する。この距離を複数の特定点について得ることで、先端部分104の位置を特定する。
(もっと読む)
合成開口ソーナー
【課題】送受波器の動揺を補正し、合成開口処理への影響を軽減した合成開口ソーナーを提供する。
【解決手段】仮想の単一配列に動揺を加えず基準位置との間の伝搬距離を計算する第1伝搬距離計算器と、複数配列に動揺検出処理部からの動揺量を擬似的に加えて基準位置との間の伝搬距離を計算する第2伝搬距離計算器と、それらの出力の伝搬距離差から動揺量を計算する補正量計算器と、この動揺量に基づいて受信信号に動揺補正を行なう動揺補正器と、i回目の送波とi+1回目の送波に対応する送波器と受波器の中間位置の一部が、一致するように送信タイミングを制御するPRF制御器と、i回目の送波とi+1回目の送波に対応する受信信号を出力する動揺補正器と、受信信号の目標との間の伝搬距離差から動揺量を検出する自己補正量計算器と、この動揺量に基づき受信信号にさらなる動揺補正を行なう自己動揺補正器とを組み合わせ、動揺補正を行なう。
(もっと読む)
超音波送波装置
【課題】温度変化に起因した超音波送波器の指向性の変動を抑制する。
【解決手段】超音波の波長が変化するとホーン120によって調整される指向性にも変動が生じてしまう。本実施形態では、発振周波数調整回路14が温度検出回路13で検出する雰囲気温度に応じて、音速Vsの変化を相殺するように発振器11の発振周波数を調整する。故に、超音波送波器10から送波される超音波の波長λが雰囲気温度の変化に対してほぼ一定となり、その結果、温度変化に起因した超音波送波器10の指向性の変動を抑制することができる。
(もっと読む)
アクティブソナー装置、及びアクティブソナー装置を搭載したATM端末装置
【課題】マイクロホンの本数を2本に抑え、かつ比較的少ない演算量で標的位置の定位を行える、製造コストの安価なアクティブソナー装置を提供すること。
【解決手段】制御・演算部1は、送波器4の探査音の放射からエコーの受波までに要した時間から、標的の距離を求める。また、マイクロホンA(2)及びマイクロホンB(3)の、エコー波形Aとエコー波形B間の音圧比を計算し、該計算結果から、標的の垂直方向を求める。また、エコー波形AとBとを足し合わせることで、マイクロホンA(2)及びマイクロホンB(3)を仮想的に1つのマイクロホンとした場合の合成のエコー波形を演算し、さらに、時間差+φを加えた場合のエコー波形A、Bの和と、時間差−φを加えた場合のエコー波形A、Bの和を求め、それぞれの結果の波形の音圧値の比を計算することで、標的の水平方向を求める。
(もっと読む)
海底熱水鉱床探測装置
【課題】海底におけるブラックスモーカーあるいはホワイトスモーカーの位置を測定する海底熱水鉱床探測装置を提供すること。
【解決手段】
送信部13より送信信号を送受波器11へ供給するとともに、送受波器11で受信した信号を受信部14へ供給する。送受波器11は、空孔率10%の多孔質PZT圧電体振動子で構成した。受信部14は、送信用信号と受信信号との差の周波数をとるヘテロダイン検波部を備えている。符号15は帯域通過フィルタである。符号17は、デジタルシグナルプロセッサであり、相関処理、FFTの演算処理を実行する。符号18は表示制御部であり、DSP17で求められたスモーカーのデータをモニタ19に適したビデオ信号に変換する。符号21はGPS電波受信用のアンテナであり、符号20はGPS信号から調査船1の位置を特定するための信号処理回路である。
(もっと読む)
測定装置、測定方法および水中距離測定システム
【課題】送信装置と受信装置との距離を精度良く測定する。
【解決手段】受信装置200は、水中において信号を複数の異なる周波数で超音波により送信する送信装置100との距離を測定する測定装置であり、送信装置100から送信された超音波から周波数に応じた複数の信号をそれぞれ抽出し、抽出した複数の信号の強度の差分を示す差分値、送信装置100との距離が既知である場合の複数の信号の強度の差分を示す第1の定数、および信号が送信された複数の周波数において距離に応じた信号の強度変化の差分を示す第2の定数に基づいて、送信装置100からの距離を取得する。
(もっと読む)
探知距離計算システム、探知距離計算方法、探知距離計算プログラム
【課題】ソーナー装置による探知可能な領域を正確に算出する。
【解決手段】シグナルエクセスの値に基づいてソーナー部50による探知が可能であるか探知が不可能であるかを距離区間ごとに判定する探知可否区間初期設定部11と、探知が不可能であると判定された距離区間である探知不可区間の長さと、探知可能と判定された距離区間である探知可能区間の長さを検知し、各探知不可区間の長さとこの探知不可区間の前後両側に隣接した探知可能区間それぞれの長さとの関係に基づき探知不可区間を探知可能区間へと併合設定する探知可能区間併合部12と、併合設定された距離区間内における探知可能区間を前記探知可能設定区間として抽出する探知可能区間距離計算部14とを備えた。
(もっと読む)
駐車位置探索システム
【課題】車両方向を認識できる駐車位置探索システムを得ること。
【解決手段】本発明の駐車位置探索システムにおいて、携帯電子キー1は、探索開始ボタン11と、探索開始ボタン11がONの間、車両2との間で識別可能なIDを含む無線信号を送信する無線ID送信部12と、応答信号を受信する指向性超音波センサー13と、受信レベルを探索者へ通知する受信レベル通知部14とを備え、指向性超音波センサー13は、指向性を有し、車両2方向に向けて応答信号を受信した場合に応答信号を最大受信レベルで受信し、車両2は、無線信号を受信する無線受信部21と、受信した無線信号に携帯電子キー1との間で識別可能なIDが含まれているかを判定するID判定部22と、識別可能なIDが含まれていると判定された場合に応答信号を送信する超音波送信部23とを備える。
(もっと読む)
XYステージ
【課題】プラテン上を2次元移動するスライダの位置を制御するXYステージにおいて、光軸調整に高い精度が要求される反射型センサを用いることなく、スライダの接触・衝突を防止できるようにする。
【解決手段】プラテン上の平面を2次元移動するスライダの位置を制御するXYステージであって、スライダに、他物体が前記平面上の所定の基準距離内に存在していることを検出する超音波センサが配置され、超音波センサが、基準距離内に他物体が存在していることを検出すると、超音波センサが配置されているスライダの移動を停止させる制御部を備える。
(もっと読む)
自動扉制御装置および方法
【課題】センサの複雑な設定などを必要とせずに、迅速な応答時間で挟み込みを防止することができる自動扉の制御を可能にする。
【解決手段】速度算出部102による設定値以上の移動速度の算出により、いずれかの距離を計測した時点より物体が自動扉に到達するまでの到達予想時間を、計測したいずれかの距離と移動速度とより算出する到達時間算出部103と、到達予想時間が算出されると、到達予想時間の算出に用いた距離を計測した時点より到達予想時間が経つと自動扉を開状態に制御する開閉制御部104を備える。
(もっと読む)
空気調和機および障害物検知装置
【課題】人位置判別領域及び障害物位置判別領域を細分化し、各領域における人の在否判定と障害物の有無判定を効率的に行うとともに、これらの判定結果に基づいて風向変更手段をきめ細かく制御することにより空調効率の向上した空気調和機を提供すること。
【解決手段】室内機に、人の在否を検知する人体検知装置と、障害物の有無を検知する障害物検知装置とを設け、前記人体検知装置の検知信号及び前記障害物検知装置の検知信号に基づいて前記室内機に設けられた風向変更手段を制御するようにした空気調和機であって、前記障害物検知装置が、超音波を送受信する超音波センサと、該超音波センサに送信信号を送信するとともに前記送信信号を送信してから所定期間のみ受信を許可する受信許可期間を設け、該受信許可期間における音波受信信号に基づいて障害物の有無を判定するようにした。
(もっと読む)
超音波受信モジュール、超音波距離測定システムおよび超音波距離測定方法、並びに書画カメラ
【課題】超音波を利用して距離を測定する超音波受信モジュール、超音波距離測定システムおよび超音波距離測定方法、並びに書画カメラを提供する。
【解決手段】超音波受信モジュール120は、少なくとも1つの超音波信号を受信する超音波受信端130と、超音波受信端130と電気的に接続され、時間の経過とともに増大する所定倍率を提供し、所定倍率により超音波信号の振幅を変更する信号増幅器140と、信号増幅器140と電気的に接続され、時間の経過とともに低減する閾値を提供し、振幅が閾値よりも大きな超音波信号の部分をキャプチャする測定モジュール150とを備える。
(もっと読む)
超音波送受波装置
【課題】 超音波の送波と受波とを行う超音波送受波装置でありながら、送波特性も受波特性も良好な超音波送受波装置を提供する。
【解決手段】 超音波送受波装置は、複数の送波用圧電素子と、複数の受波用圧電素子と、超音波伝達部材と、を備える。送波用圧電素子は、厚み方向の寸法が、径方向の寸法よりも大きくされ、厚み方向に、所定周波数で機械的に共振する特性を有し、電気的に互いに並列に接続されてなる。受波用圧電素子は、厚み方向の寸法が、径方向の寸法よりも大きくされ、厚み方向に、所定周波数で機械的に反共振する特性を有し、電気的に互いに並列に接続されてなる。
(もっと読む)
障害物検出装置
【課題】障害物の誤検出を抑制することのできる障害物検出装置を提供する。
【解決手段】制御手段に、降雨量と閾値とを比較する降雨量判定手段425、720と、ノイズの有無を判定するノイズ判定手段430、725の少なくともいずれか一方を備え、降雨量判定手段425、720にて降雨量が閾値より大きいと判定した場合には降雨量が閾値より小さいと判定した場合と比較して、もしくは、ノイズ判定手段430、725にてノイズがあると判定した場合にはノイズがないと判定した場合と比較して、指向性を狭くする信号を超音波センサ5に対して送信させる。
(もっと読む)
障害物検知装置
【課題】隣り合う2つの超音波ソナーの双方で障害物検知が行えるエリアを広げ、広範囲で障害物の位置特定が行えるようにする。
【解決手段】超音波ソナー2a、2bのいずれか一方を送受信モードにすると共に他方を受信モードとし、かつ、受信モードに設定する方に関しては受信感度を高めるようにする。これにより、隣り合う2つの超音波ソナー2a、2bの双方で障害物検知が行えるエリアD2を広げることが可能となり、広範囲で障害物の位置特定を行うことが可能となる。
(もっと読む)
超音波センサーユニット
【課題】超音波の送信時及び受信時のいずれにおいても最大限の性能を発揮できる、超音波センサーユニットを提供することを目的としている。
【解決手段】圧電体3からなる超音波送信用センサー52を送信側表面に複数有する超音波送信用センサーアレイと、圧電体3からなる超音波受信用センサー53を受信側表面に複数有する超音波受信用センサーアレイと、を備え、各センサーアレイは、超音波送信用センサー52及び超音波受信用センサー53が平面視した状態で重なっておらず、かつ、送信側表面と受信側表面のどちらか一方が、超音波送信センサー52の超音波送信方向と逆方向を向き、送信側表面と受信側表面で貼り合わされ、センサーアレイには、他方のセンサーアレイの超音波センサー53を露出させる貫通孔11bが形成されている。
(もっと読む)
障害物検知システム及びこのシステムの障害物センサ診断方法
【課題】障害物検知システムに用いられる障害物センサの異常を容易に検出できるようにする。
【解決手段】各障害物センサのそれぞれについて、送信部21から送信され、受信部22に直接廻り込む超音波信号23の検出有無を判断し、検出有の障害物センサを正常センサとして認識し、検出無しの障害物センサを異常センサとして認識する。
(もっと読む)
対話装置
【課題】専用のセンサやマイクを新たに設ける必要がなく操作者までの距離検出を行い、適切なゲインで対話処理を行う。
【解決手段】受付端末20は、音声を入力するためのマイク207と、音声を出力するためのスピーカ208と有し、マイク207を介し入力された雑音により対応する雑音情報を取得し、取得した雑音情報に基づき生成された疑似雑音をスピーカ208を介し出力し、マイク207を介し入力された疑似雑音の対象物での反射音により対応する反射音情報を取得し、取得された反射音情報に基づき所定の演算処理を行い対象物が来訪者Mであると推測して来訪者Mまでの距離を検出し、この検出結果に基づき、マイク207のゲインを調整する。
(もっと読む)
誤りのあるセンサ出力を特定するための方法及び装置
【課題】誤りのあるセンサ出力を特定するための方法及び装置を提供する。
【解決手段】誤りのあるセンサ出力を特定するための方法が提供される。本方法は、或る時間にわたって、センサから第1の複数のサンプルを得ることを含む。複数のサンプルの平均を求める。第1の複数のサンプルが得られた時刻より後の時刻においてセンサから第1のさらなるサンプルも受信する。第1のさらなるサンプルと平均との相違を求める。相違が或るしきい値よりも大きいときに、第1のさらなるサンプルを誤りがあると特定する。
(もっと読む)
101 - 120 / 474
[ Back to top ]