
Fターム[5J083AD04]の内容
音波、超音波を用いた位置、速度等の測定 (14,323) | 測定量 (1,723) | 距離 (553)
Fターム[5J083AD04]の下位に属するFターム
Fターム[5J083AD04]に分類される特許
21 - 40 / 474
車両用物体認識装置
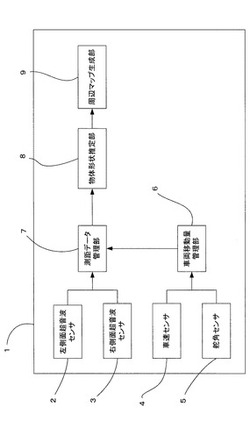
【課題】超音波センサの照射範囲内の複数方向に検出点を設定し、それらの点から正確に位置が検出された点を抽出することで、超音波センサを用いた物体形状認識の精度を向上させるとともに、これに伴うコストの低減を図る。
【解決手段】超音波センサを用いて物体の形状を認識する車両用物体認識装置1において、物体形状推定部8により、円錐状に広がる所定の照射範囲を横断した扇状の水平面の少なくとも一方側および他方側臨界線近辺の対象線のうち、超音波センサ2,3による自車両からの検出距離で、一方側および他方側対象線上それぞれに検出点を設定し、自車両の移動に伴って繰り返し設定された各検出点それぞれを繋ぎ合わせて物体上の検出点軌跡を生成し、生成された検出点軌跡それぞれに基づいて検出範囲を形成し、形成した各検出範囲の重複部分を物体の形状と認識する。
(もっと読む)
信号検出装置、信号検出方法及び信号検出プログラム

【課題】S/Nの低い受信信号であっても、検出漏れや誤判定の発生を抑制することができ、確信度がある程度ある目標があった場合に、追尾が継続しやすくなる追尾処理部を備える信号検出装置の提供。
【解決手段】音波や電磁波を発信し、目標からの反響信号の受信信号を所定の区間切り出して反響信号のスペクトルに変換した上で特徴抽出を行いパターン認識用のパターンを生成する前処理部と、入力されたパターンをあらかじめ学習されたSVM(サポートベクターマシーン)により、目標らしさを判定し、その出力を正規化し確信度として出力するパターン認識部と、確信度を閾値判定し、検出ありと判定された場合は、目標の方位距離やS/Nなどの検出目標に関わる情報を算出する目標情報算出部と、追尾処理に位置情報以外のSVMなどのパターン認識処理自体の出力値である確信度値を活用した追尾処理部を備える。
(もっと読む)
物体検出装置
【課題】複数の超音波物体検出部により障害物検出を行う場合の、検出タイミングのばらつきを抑制する。
【解決手段】バンパ部11の長手方向の全域をカバーするように互いの間隔が略均等に配置された4つの超音波物体検出部CRL,CNL,CNR,CRRを駆動する際、左右何れか一端、例えば、左端の超音波物体検出部から中央に向かって順に駆動する。次に右端の超音波物体検出部から中央に向かって順に駆動する。つまり、超音波物体検出部CRL,CNL,CRR,CNRの順に駆動する。超音波物体検出部CNLおよびCNRはそれぞれ左端側から駆動した場合および右端側から駆動した場合の最後、つまり2番目に駆動されるため、走行車線の中央部付近の障害物検出は、超音波物体検出部CNLとCNRとにより、定周期で行われることになる。
(もっと読む)
物体検出装置
【課題】移動体に搭載した場合に、受信信号のSN比の向上を実現しながらも、検出対象とする物体の相対速度の範囲を当該移動体の速度に応じて変更することを可能にする物体検出装置を提供する。
【解決手段】移動体に搭載され、複数のパルスからなる複数のパルス列で構成される送信信号を発生するパルス発生器1と、パルス発生器1の発生する送信信号について、所定の符号系列に従って送信信号のパルス列毎にデジタル変調を施した変調信号を出力する信号変換器2と、信号変換器2の出力する変調信号を送信波として送波するとともに、その送信波の反射波を受波するマイク6と、マイク6で受波した反射波から得られる受信信号と前記変調信号との符号の相関値を求め、その結果により反射波から得られる受信信号をパルス圧縮するパルス圧縮手段とを備え、移動体の速度に応じて、信号変換器2において用いる符号系列の長さを変更する。
(もっと読む)
超音波距離測定装置および輸送機器
【課題】測定対象までの距離を迅速に測定することが可能でかつ超音波の多重反射による測定精度の低下が防止された超音波距離測定装置およびそれを備えた輸送機器を提供する。
【解決手段】送信素子50は、各測定期間において、超音波を送信する。受信素子60は測定対象で反射された超音波を受信し、受信した超音波の強度に対応する受信信号を出力する。反射時間測定部90は、各測定期間において、受信信号の第1の反射成分の時間軸上の位置に基づいて測定対象までの距離に対応する時間を算出する。ピーク保持部110は、第1の反射成分の最大値を保持する。可変電源140は、保持された最大値に基づいて、次の測定期間において受信信号に第1の反射成分が出現するとともに第2の反射成分の出現が抑制されるように、次の測定期間において送信素子50により送信される超音波の強度を調整する。
(もっと読む)
車両用道路形状認識方法及び装置、記録媒体
【課題】より正確な道路形状を頻度良く算出することができる車両用道路形状認識方法及び装置、記録媒体を提供する。
【解決手段】道路における停止物の中から反射体の物体単位データを抽出し、抽出した反射体の物体単位データに基づいて反射体の列を通る円を近似することにより道路形状推定Rを算出し、この道路形状推定Rを用いて道路形状を認識する。この一連の処理を所定の周期で繰り返し実行する。そして、反射体の物体単位データを抽出する際には、前回周期で抽出した反射体の物体単位データのうち、前回周期で算出した道路形状推定Rを基準とした径方向の所定範囲内に位置するものを今回周期の抽出処理で抽出した反射体の物体単位データに追加する。また、道路形状認識を行う際には、データ追加後の反射体の物体単位データに基づいて道路形状推定Rを算出し、この道路形状推定Rを用いて道路形状を認識する。
(もっと読む)
超音波センサ
【課題】超音波振動子の周囲温度が低温時においても残響振動の持続時間を短くすることのできる超音波センサを提供する。
【解決手段】超音波を送受波する超音波振動子1と、超音波振動子1と並列に接続されて超音波振動子1の残響振動の持続時間を調整する調整用コイルL1とを備え、調整用コイルL1を、超音波振動子1の周囲温度の常温時において超音波振動子1の残響振動の持続時間が最も短くなるインダクタンスよりも5〜15%大きいインダクタンスに設定した。
(もっと読む)
超音波距離測定システム
【課題】第1の装置は、第2の装置への超音波の送信より第2の装置からの応答の超音波の受信までの時間の計測値と音速とに基づいて、第1の位置と第2の位置との間の距離を測定するシステムにおいて、第1の装置の送信波の周波数又はパルス数を第2の装置と異なる値に設定することなく、周囲に存在する物体からの反射波に起因する誤測定を防止する。
【解決手段】親機(第1の装置)は、子機(第2の装置)へ超音波102を送信し、子機2は、親機からの送信波を受信し(受信波202)、一定時間T2経過してから、応答波204を送信する。親機は、超音波102の送信後、一定時間T2経過してから、子機からの応答波を検出する。超音波102が周囲の物体で反射し、親機に到達する受信波103、105を子機からの応答波と誤らない。親機は、時間(T4−T2)と音速を基に、子機までの距離を測定する。
(もっと読む)
障害物検知装置
【課題】 障害物検知装置において、車両と障害物との距離を測定して使用者に報知するだけでなく、使用者が自在に設定した距離が、車両と障害物との距離の報知を妨げることなく報知されるようにすることである。
【解決手段】 車両1の障害物検知装置100は、領域P1〜P4に対応する報知形態で、そのときの衝突回避距離を使用者に報知するという従来の機能(第1の機能)に加えて、使用者が自在に設定した距離(例えば、バックドア開放距離L)を報知する機能(第2の機能)を有する。しかも、バックドア開放距離Lの報知は、衝突回避距離の報知に重ねて、しかも両者が混同しないような報知形態で報知される。
(もっと読む)
物体検知装置
【課題】コストを増大することなく極近距離に存在する物体を検知することのできる物体検知装置を提供する。
【解決手段】超音波を送受波する超音波振動子1と、物体A1からの反射波の受波に要する時間に基づいて近距離及び遠距離の物体A1を検知する第1のゲート期間G1及び第2のゲート期間G2を設定する制御部4とを備え、制御部4は、両ゲート期間G1,G2で反射波を受波した状態から第2のゲート期間G2のみで反射波を受波する状態に移行すると、第1のゲート期間G1で検知する位置よりも近い位置に物体A1が存在すると判定する。
(もっと読む)
3次元測位システム、ノード、ホスト、およびその動作方法
【課題】 複数のノードおよび1つのホストを備える3次元(3D)測位システムを提供する。
【解決手段】 ノードは、ノードがオブジェクトモードである場合、超音波レンジング技術に従って超音波を送信し、ノードがビーコンモードである場合、超音波レンジング技術に従って、ノードと、現在測定すべきオブジェクトノードとの間の距離を、ホストに提供すべき測定距離として測定するように構成される。ホストは、ビーコンモードのノードの数が所定の数以上である場合、ビーコンモードのノードによって報告される距離、およびビーコンモードのノードの位置に基づいて、オブジェクトモードのノードの位置を算出するように構成される。ノードは、その運動状態に従ってオブジェクトモードとビーコンモードとの間で自動的に切り替わる。
(もっと読む)
被測定断面寸法計測装置およびコンピュータプログラム
【課題】 超音波を利用しての簡易的で高精度な被測定断面寸法を計測可能な技術を提供する。
【解決手段】 被測定断面寸法計測装置(10)は、同心円状に配列した複数列の圧電素子(23a,23b)からなる超音波発振部(21)を備えた超音波送受信装置(20)と、 その超音波送受信装置(20)が被測定断面を横切るように超音波(24)を連続発振可能であるように発振角度を変化させる超音波角度変化装置(30)と、 前記超音波送受信装置(20)が発振した超音波(24)の反射波(25)を受信して、その受信結果に基づいて前記超音波発振部(21)における複数列の圧電素子(23a,23b)の超音波発振を切り替える自動切り替え装置(40)と、 前記超音波送受信装置(20)が受信したデータから被測定断面寸法を算出する演算部(64)を備えた制御装置(50)と、を備える。
(もっと読む)
位置検出装置、ウェアラブルセンサシステム及びプログラム
【課題】簡単、安価な構成で高精度に位置検出を行う。
【解決手段】3個の受信機までの3つの距離をベクトルとしたデータベースが予め登録された記憶部と、各受信機が出力する送信機と各受信機との間の距離に依存する距離情報に基づいてデータベースを探索して初期位置を用いて連立非線形方程式を解いて移動部分の位置を検出する検知処理部は、距離情報をフィルタリングしてデータベースの探索用距離情報を取得する第1のカルマンフィルタと、動的に調整されて移動部分の位置状態を推定する位置状態推定用の第2のカルマンフィルタを含むように構成する。
(もっと読む)
安全性の高められたレーザー送信を制御する方法および装置
【課題】レーザー感知システムからのノンアイセーフレーザー信号の送信を制御して、レーザー感知システムの動作範囲の境界外に場所を定められた近くの物体に高められた安全性を提供すること。
【解決手段】信号の放出を制御するシステムであって、信号を送信する信号ユニットであって、システムは、送信された信号によって意図した目標と衝突するための動作範囲を含む、信号ユニットと、レンジユニットであって、物体の範囲を決定し、決定された範囲に基づいて信号の送信を制御し、信号の送信は、動作範囲外にある物体の決定された範囲に応答して不能にされる、レンジユニットとを備えている、システム。
(もっと読む)
超音波センサ
【課題】部品点数を増やすことなく防水性を確保することができ、また、重量及びコストの増加を抑制し、且つ回路基板の歪みの発生を防止することのできる超音波センサを提供する。
【解決手段】超音波の送受波を行う送受波素子1と、送受波素子1を介して送受波される超音波信号を処理するための電子回路が実装された回路基板3と、送受波素子1が収納される素子収納部40、及び回路基板3が載置される基板載置部41が設けられるとともに、素子収納部40と基板載置部41とを連通する挿通口42が形成されるハウジング4と、挿通口42を通して送受波素子1と回路基板3の電子回路とを電気的に接続するピン端子11と、挿通口42を封止する封止板6とを備え、回路基板3は、その全面に亘って絶縁性を有するコーティング材7によってコーティングが施される。
(もっと読む)
侵入検知システム、距離測定装置、距離測定方法および距離測定プログラム
【課題】空間特徴量を用いて人間の動作を検知する侵入検知システムにおいて、簡易な構成で侵入者の位置を測定する。
【解決手段】侵入検知システム201において、距離測定装置101は、音波を送信するための測定用送信機11と、測定用送信機11の近傍に配置されるかまたは測定用送信機11と一体化され、測定用送信機11から送信された音波を受信するための測定用受信機12と、侵入検知装置151によって人間の動作が検知される前および検知された後の各々における、測定用送信機11から直接または反射して測定用受信機12に到着した音波である複数の受信波の到着タイミングを示す時間情報、および各受信波の振幅を示す振幅情報を取得し、取得した各時間情報および各振幅情報に基づいて、距離測定装置101と所定エリアにおける人間との距離を算出するための制御部13とを含む。
(もっと読む)
配置場所評価装置、侵入検知システム、配置場所評価方法および配置場所評価プログラム
【課題】侵入検知装置が備える送信機および受信機の配置場所を適切に評価することが可能な配置場所評価装置、侵入検知システム、配置場所評価方法および配置場所評価プログラムを提供する。
【解決手段】配置場所評価装置101は、無線信号を送信するための測定用送信機11と、測定用送信機11から送信された無線信号を受信するための測定用受信機12と、所定エリアにおける検知用送信機21および検知用受信機22の配置場所候補に測定用送信機11および測定用受信機12がそれぞれ配置された状態において、測定用送信機11から直接または反射して測定用受信機12に到着した無線信号である複数の受信波の到着タイミングまたは各到着タイミングの関係を示す時間情報、および各受信波の振幅を示す振幅情報を取得し、取得した時間情報および振幅情報に基づいて配置場所候補を評価するための制御部13とを備える。
(もっと読む)
パルス抽出負荷低減方法及び探索側端末並びに被探索側端末
【課題】機能等に制限のある端末間で、音波による位置関係推定を行うに際しての相関処理の負荷を低減する。
【解決手段】位置推定開始確認(1)(2)後、探索側端末10は送信する音波パルスを予め設定して(3)、被探索側端末20に通知し(4)、被探索側は録音を開始する(5)。探索側は設定に従う音波パルスを送信する(7)と共に、各パルスの送信時刻を取得し(8)、送信終了を被探索側に伝える(10)。被探索側は録音を終了し(11)、録音に中から、負荷処理を低減した相関処理で受信時刻を求め(12)、受信時刻を探索側に通知する(13)。探索側は受信時刻と送信時刻とから、位置関係の推定を行う(14)。相関処理はウィンドウサイズ、データビット数及びサンプリング間隔を粗く取って1回目に暫定位置を求めてから、2回目に暫定位置周囲でパラメータを細かく取って確定する。
(もっと読む)
直接波抽出方法並びに探索側端末及び被探索側端末
【課題】機能等に制限のある端末間で、音波による位置関係推定を行うため直接波のみを抽出する。
【解決手段】位置推定開始確認(1)(2)後、探索側端末10は送信する音波パルスの回数及び間隔を予め設定して(3)、被探索側端末20に通知し(4)、被探索側は録音を開始する(5)。探索側は設定に従う音波パルスを送信する(7)と共に、各パルスの送信時刻を取得し(8)、送信終了を被探索側に伝える(10)。被探索側は録音を終了し(11)、録音に含まれる音波パルスの中から、予め通知されている所定の回数及び間隔に従うものを直接波を受信したパルスと判定して(12)、受信時刻を探索側に通知する(13)。探索側は受信時刻と送信時刻とから、位置関係の推定を行う(14)。
(もっと読む)
接近車両検出装置及び接近車両検出方法
【課題】最大検出距離性能と耐ノイズ性能を共に向上できる接近車両検出装置及び接近車両検出方法を提供することを課題とする。
【解決手段】複数の集音器13A,14A,15A,16Aで集音された音に基づいて接近する車両を検出する接近車両検出装置であって、狭い間隔の集音器対11A(13A,14A),12A(15A,16A)を用いて音源(特に、車両の走行音)の検出を行うとともに、集音器対11A,12Aの間隔よりも広い間隔で配置された集音器対13A,16Aを用いて音源の接近を検出することを特徴とする。
(もっと読む)
21 - 40 / 474
[ Back to top ]