
Fターム[5J084BB01]の内容
光レーダ方式及びその細部 (24,468) | 装置の光学要素 (2,698) | レンズ (825)
Fターム[5J084BB01]の下位に属するFターム
集光レンズ、集束レンズ (283)
ズームレンズ (24)
コリメータレンズ (170)
可動レンズ (75)
フレネルレンズ (21)
シリンドリカルレンズ (46)
屈折率分布型レンズ (2)
穴開きレンズ (7)
その他の組合せレンズ (34)
Fターム[5J084BB01]に分類される特許
141 - 160 / 163
車載用監視装置

【課題】 走行中であっても前走車両の有無や前走車両との距離などを確実に検出可能な車載用監視装置を提供すること。
【解決手段】 車載用監視装置1において、レーザ光Lを所定の角度範囲にわたって走査させながら投光する光走査機構3は、レーザ光源40と、レーザ光源20から出射された光を偏向して投光する凸レンズからなる投光用偏向素子20と、投光用偏向素子20が搭載された可動部材60と、可動部材60を水平方向の所定の範囲にわたって往復駆動するステッピングモータ構造の磁気駆動装置50とを備えている。磁気駆動装置60は、可動部材60側に搭載されたマグネット55と、マグネット55の着磁面に対向する極歯を備えた第1および第2のステータ51、52とを有し、第1のステータ51および第2のステータ52は、面内方向で離間した位置に配置されている。
(もっと読む)
測地距離データを得る方法及び装置
この発明に従って、一つ又は数個の目標に光信号が発射されて、それにより測地距離データを得る。送信器(1”)及び受信器(4”)等の装置要素が、目標(3a、3b)に基づいて、線形の時間的独立のシステムとして設けられる。そのシステムは、信号s(t)により励起され、そのシステム応答y(t)が記録される。遅れ計又は位相計とは相違して、この距離データは、このシステムの応答における遅れと信号形状から得られる。  (もっと読む)
(もっと読む)
距離測定装置

【課題】
高精度で安定した測定が可能であり、発光素子駆動回路を省略し、回路構成を簡略化すると共に回路からのノイズの発生を抑制し、測定精度、信頼性を向上させる距離測定装置を提供する。
【解決手段】
レーザ光線として光周波数コムを発生するレーザ装置21と、該レーザ装置からのレーザ光線を基準光36と測距光31に分割する分割手段23と、前記基準光を受光して多数のビート信号を出力する基準受光部37と、前記測距光を受光して多数のビート信号を出力する測定受光部27と、該測定受光部から少なくとも1つのビート信号を取出す第1電気的フィルタ34と、前記基準受光部から少なくとも1つのビート信号を取出す第2電気的フィルタ38とを有し、前記第1電気的フィルタから出力されるビート信号を基に得られる位相と前記第2電気的フィルタから出力されるビート信号を基に得られる位相とに基づき位相差を求め、該位相差に基づいて距離を測定する。
(もっと読む)
レーザ光出射器およびレーザレーダ装置
【課題】コンパクトでありながら、かつ動作不良もない、レーザ光出射器を提供する。
【解決手段】変調されたレーザ光を出射するレーザ出射器において、一方の基板面の一部の領域を除く表面全体が導電体膜で覆われた1つの基板の、前記一部の領域にドライバ回路を、他方の基板面にレーザダイオードを設け、金属筐体によって一方の基板面のドライバ回路を覆うことで、この金属筐体と前記導電体膜によって前記ドライバ回路を静電遮蔽する。
(もっと読む)
光学部品保持装置および光学部品保持方法
【課題】光学部品組立体を軸受基台に支持するにあたって、光学部品組立体が外部から振動を受けても、優れた耐振性をもって高精度の光学系機能を保持する光学部品保持装置および光学部品保持方法を提供すること。
【解決手段】光学部品保持装置10は、軸受基台12と、この軸受基台12に回動自在に支持される光学部品組立体13と、を具備し、光学部品組立体13は、光学部品21を支持する光学部品支持フレーム20と、この光学部品支持フレーム20に組込まれる光学部品21を光学部品支持フレーム20へ弾力的に保持するように設けられた弾性体22と、より構成され、光学部品21は、光学部品支持フレーム20から位置調整ネジ30による押圧力により移動して光軸bの位置調整がなされる一方、軸受基台12側から角度調整ネジ31による押圧力により移動して光軸bの角度調整がなされるようにした。
(もっと読む)
ビーム照射装置
【課題】 簡素な構成にて、円滑且つ安定したスキャン動作を実現できるビーム照射装置を提供する。
【解決手段】 半導体レーザ100からのレーザ光は、レンズアクチュエータ300に支持された照射レンズに入射される。照射レンズを通過したレーザ光は、レンズアクチュエータ300の駆動に応じて、Y−Z平面方向に出射角度が変化する。これにより、目標領域におけるレーザ光のスキャンが行われる。照射レンズを通過したレーザ光は、ビームスプリッタ400によってその一部が反射され分離される。分離された光は、集光レンズ500を通してPSD600上に収束される。DSP制御回路10は、PSD600からの信号をもとに、照射レンズを通過したレーザ光のスキャン位置をモニタする。そして、照射位置がスキャン軌道から外れたとき、アクチュエータ駆動回路40を制御して、照射位置をスキャン軌道に引き戻す。
(もっと読む)
物体検知装置
素子の指向性にばらつきがあっても、全ての検知エリアを均一な感度で検知することができ、しかも誤動作の発生を少なくできる物体検知装置を提供する。検知線Pの投光素子(41)または受光素子(42)と、単一の前記素子(41),(42)に対して複数の検知エリア(S1)〜(S4)を形成するプリズム体(6)と、前記素子(41)または(42)とプリズム体(6)との間に配置されたレンズ体(5)とを備え、レンズ体(5)とプリズム体(6)との間で検知線(P1)をプリズム体(6)の稜線Lに沿って平行な方向に向けるように設定され、前記プリズム体(6)は、前記稜線Lで区画される複数のプリズム片(60)を有し、この各プリズム片(60)が前記複数の検知エリア(S1)〜(S4)のそれぞれを形成するプリズム小片(61)〜(64)を有している。  (もっと読む)
(もっと読む)
時間差測定装置および測定方法並びに測距装置および測距方法
【課題】 時間差測定装置において、所定の時間差を以て生じる2つのパルス信号の当該時間差を、これら2つのパルス信号を1回の測定により精度よく測定する。
【解決手段】 スタート信号M1(パルス信号)とストップ信号M2(パルス信号)との間の時間差を測定する時間差測定装置であって、π/2の位相差を有する2つの基準信号S1,S2を基準信号発生部41(基準信号発生手段)により発生させ、スタート信号M1およびストップ信号M2の各発生タイミングにおける両基準信号S1,S2の対応振幅値A11,A12およびA21,A22に基づいて、位相差検出部42(位相差検出手段)が両パルス信号M1,M2の発生タイミング間での位相差Δθ(=θstop−θstart)を算出し、検出された位相差Δθおよび基準信号S1,S2の周期Tsに基づいて、時間差算出部44(時間差算出手段)が、両パルス信号M1、M2間の発生時間差Δtを算出する。
(もっと読む)
VCSEL型ダイオードアレイを用いた物体検出システム
VCSEL型ダイオードアレイを有する物体検出システムに関する。
車両搭載型物体検出システム(200)は監視領域(104及び106)内の他の移動車両の存在に対して自動車の運転者に警報を発するための放射源としてレーザーダイオードを利用している。この物体検出システム(200)は光送信器(204)及び光受信機(212)を含んでいる。  (もっと読む)
(もっと読む)
空間領域の監視装置
空間領域に関する監視装置(1)はアナモルフィック光学系(4)が対応付けられている受信器(2)を有する。さらに監視装置(1)は送信器(10)を有し、この送信器(10)はビームパルス束(11)を用いて受信器(2)に対応付けられている視野(8)を走査する。評価ユニット(12)において実施される短時間積分でのビーム伝播時間検出によって、視野(8)内のオブジェクトの距離画像を形成することができる。  (もっと読む)
(もっと読む)
駐車余地を測定する赤外線センサ及び車両に対する周囲の状況の監視
本発明は、車両(2)の側面に配置されたセンサ(14)によって車両(2)の横の周囲の状況を検出する装置に関する。このセンサは、電磁ビームを監視空間内に送信する送信装置及びこの監視空間内の物体で反射した電磁ビームを受信する受信装置を有する。この場合、検出信号が、反射した電磁ビームの受信時に受信装置によって生成可能である。 この装置は、本発明により、監視空間が、少なくとも2つの検出領域(18;16,18,20)を有し、この場合、第1検出領域(18)が、車両長手軸線に対してほぼ垂直に指向されていてかつ第1開口角度を有し、この場合、第2検出領域(16,18,20)が、第2開口角度を有し、この第2開口角度は、第1開口角度より大きいこと、第1検出領域(18)に割り当て可能な受信装置の検出信号が、パーキングエイド装置に入力可能であり、この場合、車両(2)が駐車余地(4)を通り過ぎる時に、駐車余地(4)が、パーキングエンド装置によって測定可能であること、及び第2検出領域(16,18,10)に割り当て可能な検出信号が、周囲監視装置に入力可能であることを特徴とする。  (もっと読む)
(もっと読む)
航空機の上流の乱気流を予測して測定するためのシステム
本発明は、航空機(14)の上流の乱気流を予測して測定し、該航空機に搭載されて配置されたシステムに関し、該システムは;前記航空機(14)の前部に向けて光ビーム(11)を送信し、かつ散乱された光ビーム(12)を受信するためのライダ(10)と、制御手段と関連付けられた直接検出デバイスと、第1内部補正アルゴリズムを使用する第1処理素子と、第2補正アルゴリズムを使用して、少なくとも1つの航空機制御面のアクチュエータに実行可能な命令を送信する第2処理素子と、を含む。 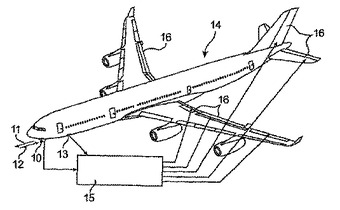 (もっと読む)
(もっと読む)
第1の可動要素の第2の要素に対する変位速度を測定するための光学装置
本発明は、第1の可動要素の、第2の要素に対する変位速度を測定するための光学装置(1)に関し、この装置は、前記要素の一方に固定されており、また、2つの入射ビーム(3a、3b)を、他方の要素の方に伝搬させる2つのレーザ(2a、2b)を備える。本発明の装置(1)は、互いにほぼ垂直な前方(9)及び後方(10)検出用感光性リニア・アレイを備える。追加の前方(12)及び後方(13)感光性リニア・アレイが、前方(9)及び後方(10)感光性リニア・アレイから間隔を置いて配設される。処理回路(11)が、感光性リニア・アレイ(9、10、12、13)に接続され、可動要素の前後方向及び/又は横方向の変位速度を決定する。また、前記回路は、光学的三角測量法を用いて、装置(1)と他方の要素との間隔を決定し、前記間隔に従って、前後方向及び/又は横方向の変位速度値を補正する。  (もっと読む)
(もっと読む)
自動ドア周辺を検出するレーザ監視及び感知装置
【課題】外部での適用例などに応用する際の使用に適した光スキャナ装置を提供すること、また、長い使用期間にわたって適切な動作が確保される光スキャナ装置を提供することにある。
【解決手段】目標物体(56)の距離範囲及び角方向を計測するための光スキャナ装置(10)であって、光パルスを送信するようになされたパルス源(12)と、この送信光パルスを反射し且つ可変掃引方向に掃引面(15)内部の掃引区域を横切って掃引するようになされた送信偏向手段(20)と、掃引面(15)内で反射された受信光パルスを検出するようになされた光検出手段(42)と、掃引面(15)内で反射された光パルスを反射し且つ反射された光パルスを光検出手段(42)に再誘導するようになされた受信偏向手段(24)と、光遮断手段(32)を備える。
(もっと読む)
3次元画像システムにおける範囲または距離またはレインジ(range)の決定
対象物の画像化のシステムと方法。
検出器アレイの画像が画像面に配設される。検出器の各アレイは内挿部を有しているタイミング回路に接続され内装器はそれが放電する時とは異なった速度で第1のキャパシタを充電する第1の回路を含む。光パルスは対処物の方に送られるので光パルスの一部分は反射パルスとして対象物から反射され光パルスがいつ対象物へ送られたかを示す第1の値が記録される。反射されたパルスは1またはそれ以上の検出器で検出されそのパルスのパルス特性とその反射パルスが検出器にいつ到達したかを表わす第2の値とが記録される。対象物との範囲はその後第1及び第2の値と反射されたパルス特性の関数として計算される。
(もっと読む)
距離測定装置
【課題】電子回路を構成する電子部品の温度変化や電源変動による電子部品特性の影響を受けないようにし、精度の高い距離測定が行える距離測定装置を提供する。
【解決手段】計測開始状態になると、送波手段2からパルス状のレーザ光を放射し、放射されたレーザ光は分岐手段3で照射波と参照波とに分岐され、照射波は測定対象物6に照射される。測定対象物6からの反射波と参照波は受波手段4に入射し、信号分離手段14に送信される。信号分離手段14では参照波信号または反射波信号のどちらかを通過させてカウンタ15で計数して各信号の周期を計測して、これらの時間から測定対象物までの距離を求める。カウンタ15で計数するときに、参照波信号計測、反射波信号計測、反射波信号計測、参照波信号計測というように参照波信号と反射波信号の計測を順序を入れ替えて交互に行う。
(もっと読む)
赤外線投光器、赤外線撮像装置、並びに車両
【課題】 レーザレーダを備えた車両等において、安価且つ低消費電力で赤外線映像を取得する。
【解決手段】 レーザ光を出射するレーザー発振器21と、レーザスキャン範囲Aでレーザ光を走査させる首振りアクチュエータ23と、物体で反射したレーザ光を受光する首振りアクチュエータ23と、レーザー発振器21から出射されたレーザ光を発散させて、レーザスキャン範囲A及び近赤外投光範囲Cを含む範囲に近赤外線を投光する近赤外投光用レンズ11と、物体で反射した近赤外線光を受光して赤外線映像を撮像する近赤外線カメラ4とを備え、ECU3により、物体を検出する場合には、レーザ光を走査させて受光したレーザ光に基づいて物体情報を算出し、赤外線映像を取得する場合には、近赤外線を投光させて赤外線映像を撮像させる。
(もっと読む)
バイスタティックレーザレーダ装置
バイスタティックレーザレーダ(ライダ)デバイスが開示される。本デバイスは、集束された送信ビームを形成する送信チャネル(60)と、集束された受信ビームを形成する受信チャネル(62)とを含む。デバイスは、デバイスの動作可能な距離範囲内の距離に集束されている時には、送信ビームの焦点と受信ビームの焦点とが共通軸上に位置するように配列されている。デバイスは、振動計測、風速測定等に使用することができる。光ファイバをベースとする構成要素を使用して、このようなデバイスを実現することが開示される。  (もっと読む)
(もっと読む)
光電検出デバイス
本発明は、光電検出デバイス、特にはレーザ・スキャナに関する。この光電検出デバイスは、好ましくはパルス化された電磁放射線を送信するための送信デバイスと、前記送信デバイスと関連づけられた少なくとも1つの受信デバイスと、前記送信デバイスによって送信される放射線を監視領域内へ誘導し、且つ前記監視領域により反射される放射線を前記受信デバイスに誘導するために使用される少なくとも1つの偏向デバイスと、を備える。上記送信デバイスは、特定の送信経路に沿って放射線をそれぞれ送信する幾つかの(好ましくは2つの)別個の送信モジュールを備える。  (もっと読む)
(もっと読む)
面法線計測方法及びその装置
【課題】
離れた位置にある小領域対象面の面法線を計測する方法及び装置を提供する。
【解決手段】
互いの両端面を平行に組み合わせて中間に一定の隙間を有する2枚のウェッジプリズム11a、11bを用い、光ビームの入射光91を平行にシフトするためのビームシフト光学系1を構成し、これを角度可変アクチュエータ41により一体で回転させ照射位置を可変とし、小領域中の少なくとも3点94a、94b、94cに光ビームを照射して得られる距離データを基に法線演算回路51で法線を算出することにより、離れた位置にある対象面の面法線を計測する方法及びその装置を提供する。
(もっと読む)
141 - 160 / 163
[ Back to top ]