
Fターム[5J084BB01]の内容
光レーダ方式及びその細部 (24,468) | 装置の光学要素 (2,698) | レンズ (825)
Fターム[5J084BB01]の下位に属するFターム
集光レンズ、集束レンズ (283)
ズームレンズ (24)
コリメータレンズ (170)
可動レンズ (75)
フレネルレンズ (21)
シリンドリカルレンズ (46)
屈折率分布型レンズ (2)
穴開きレンズ (7)
その他の組合せレンズ (34)
Fターム[5J084BB01]に分類される特許
21 - 40 / 163
姿勢検出装置
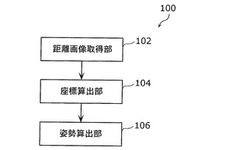
【課題】被験者の姿勢を示す値を正確に算出する。
【解決手段】各画素における輝度値がカメラから被験者までの距離を示す距離画像を取得する距離画像取得部102と、距離画像取得部102が取得した距離画像に基づいて、被験者に貼付された複数のマーカーの三次元空間中での座標を算出する座標算出部104と、座標算出部104が算出した複数のマーカーの座標から、被験者の姿勢を示す値を算出する姿勢算出部106とを備える。
(もっと読む)
レーザレーダ

【課題】迷光が入射される場合にも、回路規模の増大を招くことなく、障害物までの距離を精度よく測定することができるレーザレーダを提供する。
【解決手段】レーザレーダ1は、レーザ光を出射するレーザ光源21と、目標領域においてレーザ光を走査させるミラーアクチュエータ23と、目標領域において反射されたレーザ光の反射光を受光する光検出器33と、光検出器33を移動させる光検出器駆動部34を有する。光検出器駆動部34は、光検出器33を反射光の入射位置に移動させる。光検出器33を反射光の入射位置に移動させることにより、複数の光検出器および回路部を用いずに、反射光を精度よく検出することができる。
(もっと読む)
ビーム照射装置
【課題】光検出器上におけるサーボ光の理想軌道を線形に近づけることができ、且つ、サーボ光によるミラーの制御を円滑に行うことができるビーム照射装置を提供する。
【解決手段】ビーム照射装置は、走査用レーザ光を出射する走査用レーザ光源201と、サーボ光を出射する半導体レーザ301と、走査用レーザ光とサーボ光の進行方向を一致させるダイクロイックミラー401と、走査用レーザ光を走査させるミラー150と、サーボ光を分離するダイクロイックミラー402と、サーボ光を受光するPSD311と、PSD311からの信号に基づいて位置検出信号を生成する位置信号生成回路8と、位置検出信号に基づいてミラー150を駆動するマイコン12とを備える。走査用レーザ光とサーボ光がミラー150に入射するため、走査用レーザ光が目標領域を水平に走査すると、サーボ光はPSD311上を線形に走査する。
(もっと読む)
遠隔乱気流検知方法及びそれを実施する装置
【課題】本発明の目的は、遠距離領域の計測であっても計測信頼性の劣化を抑えてより遠距離まで計測を可能にするとともに、近距離領域においても計測精度の向上を実現することが可能な小型省電力の遠隔乱気流検知装置を提供することにある。
【解決手段】本発明の遠隔乱気流検知方法は、レーザ光を送信信号として大気中に放射(送信)して、該レーザ光の大気中のエアロゾルによるレーザ散乱光を受信信号として受信し、該送信信号と該受信信号との間の周波数のドップラーシフト量に基づき遠隔領域の気流の風速を計測する光学式遠隔気流計測において、受信したレンジビン内における散乱光のパワースペクトルをガウス分布曲線でカーブフィッティングすることにより風速幅を求め、該風速幅により乱気流を高精度に検知するものとした。
(もっと読む)
レーザレーダ
【課題】障害物がレーザレーダに接近した位置に有る場合も、障害物までの距離を精度よく測定することができるレーザレーダを提供する。
【解決手段】ビーム照射装置は、レーザ光を出射するレーザ光源21と、目標領域においてレーザ光を走査させるミラーアクチュエータ23と、目標領域において反射されたレーザ光を受光するとともに受光したレーザ光の強度に応じた信号を出力する光検出器33と、レーザ光源21を駆動するスキャンLD駆動回路44と、レーザ光源21を制御するDSP46と、を備える。DSP46は、光検出器33から出力される信号が所定の閾値を超えると、レーザ光源21の出力を減少させる。
(もっと読む)
光学式変位センサの調整方法、および光学式変位センサの製造方法
【課題】容易に、光学式変位センサの光学系を調整することが可能な光学式変位センサの調整方法を提供することである。
【解決手段】所定の光学系を有する光学式変位センサ10において、所定の光学系をシャインプルーフの条件を満たすように調整する。所定の光学系は、測定対象物16に対して光を照射する投光モジュール9と、投光モジュール9からの光による測定対象物16からの反射光を受光する受光素子13と、測定対象物16と受光素子13との間に位置して、反射光を受光素子13に結像する受光レンズ14とを備え、調整方法は、受光レンズ14のみを、受光レンズ14の光軸方向(Z1方向)、および受光レンズ14の光軸方向に垂直な方向(X1方向)に移動させることにより調整する。
(もっと読む)
受光レンズ、および光学式変位センサ
【課題】光学式変位センサに用いられた際に、測定性能を向上すると共に、小型化して、安価に製造可能な受光レンズを提供することである。
【解決手段】受光レンズ14は、測定対象物に対して光を照射する投光モジュールと、投光モジュールからの光による測定対象物からの反射光を受光する受光素子とを備える光学式変位センサに用いられる。受光レンズ14は、測定対象物と受光素子との間に位置して、反射光を受光素子に結像するものであり、レンズ本体40と、レンズ本体40の反射光が入射する側の表面40aに形成され、レンズ本体40と屈折率の異なる樹脂で形成される樹脂層41とを含む。
(もっと読む)
光走査装置、レーザレーダ装置及び光走査方法
【課題】複数の走査角および空間分解能を設定することができる光走査装置を、小型かつ簡便な構成で実現する。
【解決手段】光走査装置12は、複数の光源で構成される光源装置20と、光源数に対応した数の光偏向素子から構成される光偏向素子22と、各光偏向素子に個別に対応した、異なる拡大率を有する走査角およびビーム広がり角の複数の拡大レンズ系26とから構成されている。いずれかの拡大レンズ系と、これに対応した光偏向素子及び光源を選択することにより、複数の走査角および空間分解能を設定することができる。
(もっと読む)
ビーム照射装置
【課題】光検出器からの信号に基づいて検出されたサーボ光の受光位置と理想の受光位置との差分に、迷光や電気的ノイズ等による外乱成分が含まれる場合にも、適正に、レーザ光を目標領域において走査させ得るビーム照射装置を提供する。
【解決手段】マイコン7は、PSD315からの検出信号に基づいて取得されたサーボ光の受光位置と、理想の受光位置との差分を示す差分信号に基づいて、レーザ光が目標領域上の目標軌道を追従するよう、ミラーアクチュエータ100を制御する。また、マイコン7は、差分信号に外乱成分が含まれるエラー期間を検出し、検出したエラー期間において、差分信号に応じて前記レーザ光を前記目標軌道に追従させる制御を停止させる。
(もっと読む)
物体認識装置
【課題】二次元走査タイプの物体認識技術において、送信波の反射によって得られる路面の検出結果(測距データ)が、路面からの反射なのか否かを判定できる物体認識装置を提供する。
【解決手段】測距データを一体化して物標データを生成する際に用いる探索領域内に別レイヤの測距データが存在しないという条件1が成立すれば、非立体物からの測距データであると判定する。測距データを、横軸を距離、縦軸を度数として所定の距離範囲毎のデータ数を表した距離ヒストグラムと、横軸を反射強度として同様に表した反射強度ヒストグラムを考える。「路面反射による測距データであれば発生するであろう度数の閾値」を設定し、距離ヒストグラム、反射強度ヒストグラムのいずれにおいても閾値を超える度数があるという条件2が成立すれば、路面からの測距データである可能性が高い。条件1、条件2が両方成立する場合に、路面からの測距データであるとして、削除する。
(もっと読む)
レーザスキャナ
【課題】簡単、軽量な構造で、マルチビームを用いたレーザスキャナを提供する。
【解決手段】パルスビーム12を全周走査するレーザスキャナ1に於いて、該レーザスキャナが本体部3と該本体部に回転可能に設けられた回動部4とを有し、該回動部がパルスビームを該回動部の中心軸に対して垂直方向に偏向して照射する偏向部材15を具備し、前記本体部は、2次元的に配置され、複数のパルスビームを発する複数の発光源11と、パルスビームを投光、受光する光学系6と、前記回動部の水平回転角を検出する回転角検出部19と、対象物からの反射光12′を前記偏向部材を介して受光し、前記発光源とそれぞれ共役の位置にある複数の受光部18と、該受光部からの受光信号に基づき測距を行う測距部9と、前記発光源の配置位置、前記回転角検出部の検出結果に基づき前記偏向部材から照射されるパルスビームの照射方向を演算する制御演算部10とを具備した。
(もっと読む)
距離測定装置及びプロジェクタ
【課題】 正確な距離測定が可能であって測定可能な距離の範囲が広く、又機構の調整を容易に行える距離測定装置と、該距離測定装置を備えたプロジェクタを提供する。
【解決手段】 プロジェクタは、光源装置と、当該光源装置からの光を表示素子に導光する光源側光学系と、表示素子と、該表示素子から射出された画像をスクリーンに投影する投影側光学系と、距離測定装置1とを備え、光源装置や表示素子を制御するプロジェクタ制御手段を有しているものである。そして、この距離測定装置1は、レーザー光を測距対象に照射するレーザー発光器2と、測距対象からの反射光を集光する受光レンズ4と、この受光レンズ4を透過した測距対象からの反射光を受光する受光素子3と、を有し、レーザー発光器2からの射出レーザー光の光軸位置に受光レンズ4の受光領域を位置させているものである。
(もっと読む)
距離測定装置及び飛翔体位置測定装置
【課題】 鳥類等の飛翔体までの距離及び位置を簡易に測定する。
【解決手段】 レーザー距離計10の接眼レンズ11にリレーレンズ20を介してビデオカメラ30を装着した構成であり、レーザー距離計10の接眼レンズ11に表示される飛翔体の画像をビデオカメラ30のモニタ画面31に表示させることができる。従って、観測者は、レーザー距離計10の接眼レンズ11をのぞき込み、アイポイント位置を保ちながらレーザーを照射する必要はなく、ビデオカメラ30のモニタ画面31を見ながら、レーザー距離計10を操作して飛翔体を追尾でき、飛翔体を追尾しながらのレーザー照射作業が容易となる。
(もっと読む)
物理情報取得装置、固体撮像装置、物理情報取得方法
【課題】別光源から発せられた光に由来する情報を取得する際に、通常光源に起因する外乱ノイズの影響を緩和する。
【解決手段】電磁波エネルギレベルが他の波長よりも低い特定波長と対応した波長の特定波長波を物体に照射し、物体で反射した特定波長波を固体撮像素子314で検知し、得られた検知情報に基づき特定波長波に由来する情報を取得する。特定波長を中心とする狭帯域のバンドパス特性を持つ光学バンドパスフィルタ502を撮像光学経路上に配置する。特定波長波の物体反射光を検知すれば特定波長成分が通常光源の成分に埋もれずに検知される。特定波長波を物体に照射したときとしないときの各検知情報を比較して通常光源に起因する外乱ノイズの影響が緩和された特定波長波に由来する情報を取得する。光学バンドパスフィルタ502を併用すれば、特定波長成分だけを検知でき、通常光源の光量が強い場合でもその影響を受けず、飽和の問題を回避できる。
(もっと読む)
異物検出装置
【課題】ターゲットに照射して戻ってくる散乱光の偏波成分によらず異物の3次元形状を高精度に検出できる異物検出装置を得る。
【解決手段】連続波信号で変調されたレーザ光を出力する光源6と、レーザ光を用いてターゲットの捜索範囲を走査するスキャナ10と、ターゲット表面で散乱される散乱光を偏波成分ごとに分離する偏波ビームスプリッタ12と、散乱光の各偏波成分をそれぞれ受光する受信レンズ13a、13b、及び光受信機14a、14bで構成される受光手段と、レーザ光と散乱光の各偏波成分との位相差及び散乱光の各偏波成分の受信強度を検出する位相検波器15a、15bと、これらの検出結果に基づいて散乱光の偏波解消度を算出すると共に、偏波解消度の算出結果に応じて異物との離間距離を算出し異物の3次元形状を出力するパソコン3と、を備えたものである。
(もっと読む)
異物検出装置
【課題】同一捜索時間における異物の3次元形状の検出精度を向上できる異物検出装置を得る。
【解決手段】捜索対象にレーザ光を照射したときの散乱光を用いて異物を検出する異物検出装置であって、レーザ光を出力する光出力手段と、レーザ光を用いて捜索対象の捜索範囲を走査するスキャナ11と、捜索対象からの散乱光を受光する光受信機13と、レーザ光と散乱光の位相差及び散乱光の受信強度を検出する位相検波器14と、これらの検出結果に基づいて捜索範囲を絞り込んで着目領域23を抽出し、スキャンする走査線間隔を狭くしてスキャナ11に着目領域23を再走査させる制御信号を出力し、この着目領域23における位相検波器14の検出結果に基づいて3次元画像を生成するパソコン3とを備える。
(もっと読む)
レーザレーダ装置
【課題】検出物体の検出精度を高め得るレーザレーダ装置を提供する。
【解決手段】所定の回動角度において検出される受光波形が前回の同一回動角度において検出された波形に一致するとみなされる検出状態が継続して検出される場合に、この受光波形がその回動角度の背景波形として設定される。そして、遠距離側の受光波形の検出時間Tfがその回動角度における背景波形の検出時間Toに相当する、2つの波形が検出されるとき、この遠距離側の受光波形と背景波形との比率に基づいて、近距離側の受光波形に応じて検出される検出物体の回動方向長さが演算されて測定される。
(もっと読む)
ビーム照射装置および半導体レーザ装置
【課題】レーザチップの後面側から出射されるレーザ光を簡素な構成にて効果的に排除できるビーム照射装置および半導体レーザ装置を提供する。
【解決手段】ビーム照射装置は、半導体レーザ401と、半導体レーザ401から出射されたレーザ光が入射するレンズ402と、レンズ402を透過したレーザ光を目標領域においてを走査させる走査部とを備える。半導体レーザ401は、レーザチップ401cと、レーザチップ401を収容するキャップ40aと、キャップに形成されレーザチップ401cから出射されたレーザ光が通過する出射口401bとを備える。出射口401bに、レンズ402に対するレーザ光の入射領域を制限するためのアパーチャの機能を持たせる。
(もっと読む)
物体認識装置、プログラム
【課題】様々な大きさの物体を精度よく検出する物体認識装置及びプログラムを提供する。
【解決手段】受光信号の受信強度分布をセグメント化し(S110〜S130)、セグメントが過大セグメントである場合に、セグメントのピークの受信強度Apに、物体までの距離に応じて近距離であるほど小さな値となる閾値係数αを乗じることで領域抽出閾値THaを求め(S140〜S200)、その領域抽出閾値THaより信号強度が大きいセグメント内の領域の幅を、セグメントが表す物体の幅に設定する(S210)。これにより閾値係数α(ひいては領域抽出閾値THa)が大きくなる遠距離では、ビームのすそ野部分の影響が極力排除されるため、物体の幅が過大に検出されることがなく、閾値係数αが小さくなる近距離では、すそ野部分の一部を物体が存在する領域として取り込むことになるため、端ビームが無視されても物体の幅が実際より小さく検出されることがない。
(もっと読む)
光電センサ
【課題】不感帯の大きさを調整して、レンズ近傍での物体検出又はレンズから離れた位置での物体検出ができる光電センサを提供する。
【解決手段】投光レンズ12の光軸12aを、投光素子11の発光面の中心11aより受光素子13側にずらして配置し、投光領域Aを受光レンズ14側に広くすると共に、受光レンズ14の光軸14aを、受光素子13の感光面の中心13aより投光素子11側にずらして配置し、受光視野Bを投光レンズ12側に広くして、不感帯Cを小さくする。
(もっと読む)
21 - 40 / 163
[ Back to top ]