
Fターム[5J084BB01]の内容
光レーダ方式及びその細部 (24,468) | 装置の光学要素 (2,698) | レンズ (825)
Fターム[5J084BB01]の下位に属するFターム
集光レンズ、集束レンズ (283)
ズームレンズ (24)
コリメータレンズ (170)
可動レンズ (75)
フレネルレンズ (21)
シリンドリカルレンズ (46)
屈折率分布型レンズ (2)
穴開きレンズ (7)
その他の組合せレンズ (34)
Fターム[5J084BB01]に分類される特許
121 - 140 / 163
距離データ生成方法、距離画像生成装置、光電センサ

【課題】距離データをリアルタイムで得ることが可能な距離データ生成方法、その方法を用いて得られる距離データを画素値とした距離画像を生成する距離画像生成装置、及び距離画像の生成に好適な光電センサを提供する。
【解決手段】光電変換素子の出力を蓄積する二つのコンデンサを初期電圧に充電後(時刻t3)、第1補正期間(時刻t5〜t6)及び第2補正期間(時刻t6〜t7)の間、二つのコンデンサから背景光に応じた電荷を放電させる。その後、パルス光を1回照射し(時刻t8〜t10)、その反射光に応じた電荷を第1露光期間(時刻t8〜t10)及び第2露光期間(時刻t10〜t12)に分けて二つのコンデンサに別々に蓄積し、この二つのコンデンサに蓄積された電荷を画素出力値V1,V2とし、この画素出力値V1,V2から算出される強度比R(=V2/(V1+V2))に基づいて距離データLafを生成する。
(もっと読む)
光波距離計

【課題】 測定時間を短縮すること。
【解決手段】 レーザダイオード18の光をビームスプリッタ22、24で第1参照光100、第2参照光104、測距光102に分け、測距光102をターゲットに向けて出射し、第1参照光100をシャッタ28で遮蔽したときに反射光をフォトダイオード34で受光して第1測距信号を生成し、第2参照光104をフォトダイオード36で受光して第2参照信号を生成し、CPU62で基準信号に対する第1測距信号と第2参照信号の位相差を同時に演算し、次に、第2参照光104をシャッタ28で遮蔽し、反射光をフォトダイオード36で受光して第2測距信号を生成し、第1参照光100をフォトダイオード34で受光して第1参照信号を生成し、CPU62で基準信号に対する第2測距信号と第1参照信号の位相差を同時に演算し、各演算結果を基にターゲットまでの距離を求める。
(もっと読む)
光学式測距センサ及び電気機器
【課題】 測距対象物が至近距離範囲内に存在するにもかかわらず、通常の測距範囲内に存在するとの誤った検知が行われる不都合を防止できる光学式測距センサを提供すること。
【解決手段】 光学式測距センサ1は、発光ダイオード2と、発光ダイオード2からの光を集光して測距対象物に照射する投光レンズ3と、測距対象物からの反射光を集光する受光レンズ4と、受光レンズ4によって集光された光を受ける受光素子5とを備える。受光素子5から2つの信号電流I1、I2を受けた信号処理回路7は、測距対象物までの距離Dを表す出力信号Sと、測距対象物が至近距離範囲内に有るか否かを示す至近距離信号Nとを出力する。出力信号Sのうちの所定の閾値Tに対応する距離Dが、至近距離範囲内と測距範囲L内との両方に存在する場合においても、至近距離信号Nを参照することにより、測距対象物の距離Dを正確に検知できる。
(もっと読む)
投受波装置及び測距装置
【課題】 本発明の課題は、設計に合致した安定した電磁波の送受波を容易に実現することが可能な投受波装置を提供する。
【解決手段】 投光部2から出射された光を第一反射面4aで反射して被測定物に照射すると共に、被測定物で反射して戻ってきた光を第二反射面4bで反射して受波手段へ導くように構成された投受波装置1であって、第一反射面4aと前記第二反射面4bとを、単一の反射部材4の表面に形成した。
(もっと読む)
一体型レーザ/赤外線前方監視光学装置
【課題】FLIR/レーザーに基づく目標化および撮像システムにおいて、IRのLOSとレーザーのLOSとの固定された整合誤差およびダイナミック整合誤差を低減することにより、当該エリア内の目標を認識する能力を大幅に改善する。
【解決手段】IRのLOSとレーザーのLOSの間の固定された整合誤差は、改善された内部ボアサイトモジュール(図10)および対応するボアサイト方法により低減される。ダイナミック整合誤差はレーザーエネルギーおよびIRエネルギーの双方に対する単一ピッチ(405)ベアリングおよび共通ピッチ/ヨーアフォーカル(401)を使用する光電気サブシステムによって低減される。
(もっと読む)
レーザーレーダー装置
【課題】 レーザー光を対象物に照射することにより対象物との間の距離等を検出することが出来るレーダーレーザー装置を提供する。
【解決手段】 レーザー光が反射され、且つレーザー光を回折する偏光回折ビームスプリッタ2と、フォーカスレンズ3の合焦点に設けられている低反射ミラー5と、レーザー光を対象物に照射する略平行光である走査用レーザー光に変換する照射レンズ6と、低反射ミラー5と対象物との間の光路内に配置された4分の1波長板と、前記低反射ミラーにて反射されたサーボ用反射レーザー光が前記フォーカスレンズ及び偏光回折ビームスプリッタ2を介して照射される位置に設けられているサーボ用光検出器10と、対象物から反射された走査用反射レーザー光が偏光回折ビームスプリッタ2にて回折されて照射される位置に設けられた信号検出用光検出器11とよりなる。
(もっと読む)
電気光学的測定装置
本発明は、とりわけ非接触距離測定のための手持ち式装置(10)である電気光学的測定装置に関する。本発明の電気光学的測定装置は、測定信号を送信するために少なくとも1つの光学的送信器(20)を有する光学的送信経路(28)と、受信器(26)の方向に測定信号を集束するための少なくとも1つの受信光学系(32)を有する受信経路(29)と、視差補償のための光学的な近距離領域エレメント(60)とを備えており、該光学的送信経路(28)は第1の光軸(72)を有し、該受信経路(29)は、該第1の光軸(72)から離隔されている第2の光軸(74)を有し、該近距離領域エレメント(60)は、該第2の光軸(74)に対して回転対称的に形成されている。近距離領域エレメント(60)は、前記第2の光軸(74)に対して回転対称的に形成されることを提案する。 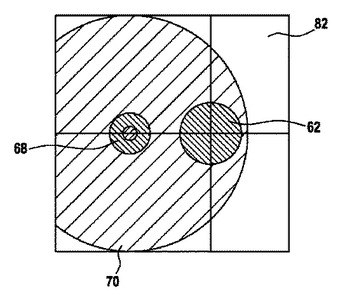 (もっと読む)
(もっと読む)
光学式測距センサ及びこれを備えた機器
【課題】 大型化やコストアップを招くことなく、被測定物が遠ざかるにつれて距離の測定精度が低下することを防止できる光学式測距センサを提供すること。
【解決手段】 LED1から出射した近赤外波長の光を発光側レンズ3で平行光にして、被測定物10に投射する。被測定物10による反射光が、受光側レンズ3とプリズム4を介してPSD5に入射する。プリズム4は、光の入射角が小さい程、入射角の変化量に対する出射角の変化量の割合が大きい屈折特性を有するので、被測定物10の位置が変化したとき、被測定物10が近距離位置にある場合と遠距離位置にある場合との間で、プリズム4からの出射光の出射角度の変化量を略同じにできる。したがって、被測定物10が遠距離位置にあるときの測定精度を、被測定物10が近距離位置にある場合と略同じにできる。
(もっと読む)
検知装置
【課題】領域内において検知した物体が障害物であるか否かを短時間で精度よく判断でき、かつ設備費用を削減できる検知装置及び検知方法を提供する。
【解決手段】検知装置は、所定の領域を走査するレーザレーダ10と、このレーザレーダ10により検知される距離情報とその走査方向の情報とから3次元レーダ情報を求めるレーダ情報作成手段21と、3次元レーダ情報から所定の領域内に存在する物体を検知する物体検知手段22と、所定の領域を、物体の進行方向に対して複数に分割された分割領域として認識する領域認識手段23と、分割領域の1つに所定時間継続して少なくとも1つの物体が滞留したときに、障害物が滞留していると判断する障害物判断手段24とを備えたことを特徴とする。
(もっと読む)
走査型レンジセンサ
【課題】 近距離での死角を可及的に減少させると共に、受光部へ不要な光が回り込むことを防止する。
【解決手段】 投光部3と同一直線X上に配置される受光部4と、受光部4を内部に収容しながら直線Xを回転中心として回転駆動されるキャップ部材7と、直線X上に傾斜した状態でキャップ部材7の上端壁部7b外面に固定され且つ投光部3から出射された光をキャップ部材7の半径方向外方に向けて走査する投光ミラー5と、直線X上に傾斜した状態でキャップ部材7の上端壁部7b内面に固定され且つ投光ミラー5の走査によって半径方向外方に形成される走査領域からの反射光を受光部4に入射する受光ミラー6と、半径方向外方に固定され投光ミラー5で反射した投光部3からの光を受光ミラー6に向けて折り返す導光部材8を備える。
(もっと読む)
時間差測定装置および距離測定装置並びに距離測定方法
【課題】 時間差測定装置において、所定の時間差を以て生じる2つのパルス信号の当該時間差の測定に際し、この時間差測定に用いられる2つの基準信号間に差異が生じても、測定結果に誤差が生じるのを防止する。
【解決手段】 スタート信号M1とストップ信号M2との間の時間差を測定する時間差測定装置であって、π/2の位相差を有する2つの基準信号S1,S2を基準信号発生部41により発生させ、振幅検出部42が、スタート信号M1およびストップ信号M2の各発生タイミングにおける両基準信号S1,S2の対応振幅値A11,A12およびA21,A22を検出し、位相差検出部43が、各振幅の組(A11,A12)および(A21,A22)に基づいて、基準信号Sにおける位相θを算出するに際し、補正部46が、基準信号S1,S2の誤差を補正する補正用データを用いて、算出される位相を補正する。
(もっと読む)
レーザ光学フィードバック断層撮影センサ及び方法
本発明は、センサ10に対する対象物の速度vzの決定のための評価器16を有する修正されたレーザ光学フィードバック断層撮影センサ10に関する。レーザ11により放出される光の1次光学周波数f0は、周波数シフタ13における第1の周波数シフトFによりシフトされ、調査領域3に焦点合わせされる。その領域における移動対象物2は、調査領域3から送り返されレーザ11に再挿入される光における追加的なドップラ周波数シフトΔFを生み出す。結果として生じるレーザ11での強度振動は、検出器15により検出される。その強度振動は、再挿入される光のシフトされた周波数に非常に依存する。最終的に、検出器15に結合される評価器16が、観測された振動からドップラ周波数シフトΔFを決定し、それから対象物2の移動速度vzを決定する。  (もっと読む)
(もっと読む)
状態検出装置
【課題】 半導体レーザ素子の自己結合効果を利用した状態検出装置であって、光分離素子や光アイソレータ等の特殊な光学素子を用いることなしに戻り光が直接受光素子に入射することを防ぎ、レーザ素子の出力光の強度を確実に検出することのできる簡易な構成の状態検出装置を提供する。
【解決手段】 レーザ素子の出力光を集光して検出対象物に照射すると共に、上記出力光の一部を側方に反射する集光レンズを、前記レーザ素子の出力光出射面に対してそのレンズ面を傾斜させて設け、この集光レンズレンズにて反射した前記出力光を受光する受光素子を、前記検出対象物により反射されて上記集光レンズを介して前記レーザ素子に入射する戻り光の光路を避けた位置に設ける。
(もっと読む)
距離測定装置
【課題】
測定基準の精度を向上させることにより、レーザ光線を使用した距離測定装置の測定精度の向上を図る
【解決手段】
測距光6を発生する光源5と、前記測距光を測定対象物8に照射し、該測定対象物からの反射光9を受光する受光部と、外部の基準時間を取得する外部基準時間取得装置とを有し、該外部基準時間取得装置54で取得した基準時間に基づいて、前記光源を制御し測距光を変調させると共に、該変調した測距光を、内部光路を介して受光した位相と、前記対象反射体で反射されて戻る反射光を受光した位相を測定し、その位相差に基づいて距離を演算する。
(もっと読む)
ビーム照射装置
【課題】 簡素な構成にて、円滑且つ安定したスキャン動作を実現できるビーム照射装置を提供する。
【解決手段】 半導体レーザ100からのレーザ光は、レンズアクチュエータ300に支持された照射レンズに入射される。照射レンズを通過したレーザ光は、レンズアクチュエータ300の駆動に応じて、Y−Z平面方向に出射角度が変化する。これにより、目標領域におけるレーザ光のスキャンが行われる。このとき、DSP制御回路10は、レーザ光が目標照射領域に一定間隔で照射されるよう、アクチュエータ駆動回路40から正弦波による制御信号を出力するよう制御し、前記制御信号に対応するタイミングにてレーザ光を照射するようレーザ駆動回路を制御する。
(もっと読む)
3次元画像情報取得システム
【課題】 測定対象物の表面反射率や表面形状によらない、高精度な測定対象物の3次元画像情報を、高速に取得可能な3次元画像情報取得システムを提供する。
【解決手段】 時間変調したレーザ光を測定対象物に向けてそれぞれ同時に照射する、それぞれ異なる位置に配置された複数のレーザ光出射部と、受光した複数のレーザ光の反射光に応じた電気信号をそれぞれ出力する、それぞれ異なる位置に配置された複数の光電変換器と、ON状態のマイクロミラーで反射した複数のレーザ光を、各光電変換器の受光面に導く空間変調素子と、各光電変換器から出力された電気信号それぞれについて、各光電変換器の受光面が受光した複数のレーザ光それぞれに応じた電気信号成分を識別する電気信号成分識別部と、各電器信号成分毎に測定対象物の3次元位置情報を求める位置情報算出部とを有する3次元画像情報取得システムを提供する。
(もっと読む)
3次元画像情報取得装置
【課題】レーザ光を測定対象物に照射し測定対象物からの反射光を受光することにより測定対象物の3次元画像情報を取得する装置であって、従来のシステムとは異なる方法を用いて高速に3次元画像を取得する。
【解決手段】測定対象物で反射したレーザ光を受光する複数の受光面を備え、各受光面で受光したレーザ光の情報をそれぞれ電気信号に変換して出力する光電変換器と、複数の部分領域毎に、選択されたマイクロミラーの反射面を所定の向きに制御してON状態にし、このON状態のマイクロミラーで反射した測定対象物からのレーザ光の反射光を、それぞれ異なる受光面へと導くマイクロミラーアレイ空間変調素子と、各電気信号毎の位相ずれ情報と、各部分領域それぞれの前記ON状態のマイクロミラーの位置情報とを用いて測定対象物の3次元位置情報を求めるデータ処理部とを有する3次元画像情報取得装置を提供する。
(もっと読む)
位置検出装置
【課題】 本発明は、対象物の位置を高精度に求めると共に、小型化が可能な位置検出装置を提供する。
【解決手段】 光信号を照射する光源と、対象物に取り付けられ、光信号を反射する反射手段と、光信号と反射手段により反射された光信号とを分離する第1の分離手段と、反射された光信号を受光する第1の受光素子と、第1の受光素子の出力信号に基づき、第1の受光素子の受光面における反射された光信号の位置を求める反射位置演算手段と、光源から第1の受光素子までの伝搬距離を求める伝搬距離演算手段と、反射位置演算手段に求められた受光面における反射された光信号の位置と、伝搬距離演算手段に求められた伝搬距離とに基づき、対象物の位置を求める対象物位置演算手段とを有する。
(もっと読む)
自動車用センサ
自動車に調節可能に取付けられている自動車用センサが紹介された。センサは少なくとも1つの撮像器(4)を含み、かつ/又はセンサは可視又は赤外線スペクトル範囲に対して設計されている。光源(3)特にLEDが、センサに対して固定的に規定された位置に設けられて、可視スペクトル範囲にある基準光線(11)を発生し、かつセンサの調整のために動作可能である。特に車両に設置されるカメラ、ライダシステム及びレーダシステムにおける使用が考えられ、調節のため普通の前照灯調節装置(9)が使用される。  (もっと読む)
(もっと読む)
逆チャープFMCWコヒーレントレーザレーダのためのコンパクト光ファイバジオメトリ
【課題】
大きな精度、迅速な測定時間、狭い空間へのアクセス、柔軟性及び信頼性を可能にする実用的な光精密測定システムを提供する。
【解決手段】
本開示は、環境の影響を受けない二重チャープコヒーレントレーザレーダのバージョンを構築するために偏光ダイプレックス方式で偏波保持(PM)光ファイバ構成要素(127)を使用するための、任意の目標(129)までの距離を測定するための方法、及び多様な構成ジオメトリを含む、非接触精密光学素子(12)を提示する。
(もっと読む)
121 - 140 / 163
[ Back to top ]