
国際特許分類[A61B17/00]の内容
生活必需品 (1,310,238) | 医学または獣医学;衛生学 (978,171) | 診断;手術;個人識別 (80,876) | 手術用機器,器具,または方法,例.止血器 (11,992)
国際特許分類[A61B17/00]の下位に属する分類
傷の開口把持用;牽引器 (357)
傷の閉鎖用,または傷を閉鎖把持するもの,例.手術用ステープル;それらと使用するための付属具 (2,011)
人体の管状部分,例.血管またはへその緒,を結紮または圧迫するためのもの (941)
手術用ののこぎり (66)
砕骨器;骨用ドリルまたはノミ;円鋸 (280)
ワクチン接種のためのものまたはワクチン接種に先だって皮膚を清浄するためのもの (34)
人体の内部器官の潰瘍またはその類似物を絞り取るための器具;人体器官,例.骨,の腔部を削り取るための器具;機械的振動を用いて結石を除去または破壊するための侵襲器具;血管の詰まりを除去するための装置で他に分類されないもの (450)
体外衝撃波による砕石用装置[ESWL],例.超音波使用によるもの
口腔,咽頭,気管支,鼻に使用するためのもの;舌擦過器 (111)
手術用鉗子 (668)
手術用ピンセット (38)
手術用切断機器 (850)
套管針;刺針 (743)
産婦人科用機器または方法 (113)
ピンセットまたはつまようじ以外の人体から異物を取出すための器具 (24)
足の小外科的治療用機器 (11)
骨または関節の手術器具および方法;その為に特に適合する用具 (2,994)
手術用内視鏡機器
国際特許分類[A61B17/00]に分類される特許
91 - 100 / 2,301
スイングアウト外科手術カメラ
【課題】外科手術器具に取り付け可能なスイングアウトカメラを提供すること。
【解決手段】細長い管状部材であって、長手方向軸を規定し、細長い管状部材を通って長手方向に延びる内腔を有し、細長い管状部材は、そこを外科手術器具が通過することを可能にするように構成される、細長い管状部材と、外科手術カメラであって、細長い管状部材の遠位端の方に細長い管状部材に回転可能に結合され、外科手術カメラは、該カメラが実質的に細長い管状部材の内腔内に配置される閉鎖位置と、該カメラが実質的に細長い管状部材の該内腔から動かされる開放位置との間で回転可能であり、外科手術カメラは、外科手術器具が細長い管状部材の該内腔内において外科手術カメラの近位表面と接触すると、閉鎖位置から開放位置に外科手術カメラが並進することを容易にするように構成される近位表面を含む、外科手術カメラとを備えている、外科手術カメラアセンブリ。
(もっと読む)
内視鏡用処置具

【課題】進退移動部材を軸線方向に進退移動させる簡単な操作により、処置機能部材を所望の向きに正確に合わせることができる内視鏡用処置具を提供し、もって、内視鏡処置を円滑かつ迅速に行えるようにする。
【解決手段】内視鏡用処置具は、シース11の先端部に回転自在に支持された処置機能部材15と、一端部を処置機能部材15に固定した進退移動部材53と、進退移動部材53の移動により処置機能部材15の回転位置を変更する回転制御手段65を備える。回転制御手段65は、シース11と一体に設けられた第1の係合部67を有するとともに、シース11内に、駆動部材51と、第1の係合部67と係合する第2の係合部69が設けられたスライド部材71と、スライド部材71に摺接するガイド面73を有し、進退移動部材53に回転規制して支持された回転部材75と、付勢部材77と、がこの順で同軸配置されている。
(もっと読む)
突刺デバイス
【課題】膜状細胞培養物の回収及び移送を円滑且つ確実に行い得る突刺デバイスを提供する。
【解決手段】突刺デバイス10は、複数の突刺部材14と、複数の突刺部材を進退可能に案内する案内部15と、を有し、複数の突刺部材は、複数の突刺部材の先端部が互いに離間するように案内部から突出して前進するとともに、複数の突刺部材の先端部が互いに集まるように後退する。
(もっと読む)
医療用デバイス
【課題】カテーテルの内部での針部材の捩れを極力抑え、突出力を手元側から円滑に作用させることが可能な医療用デバイスを提供することを目的とする。
【解決手段】カテーテル1の内部にカテーテル1の基端側から先端側まで形成されるルーメンに穿刺部材12が進退動可能に配置される医療用デバイスであって、前記穿刺部材12は、前記ルーメンから先端側に突出可能な少なくとも1本の針部12aと、前記針部12aから前記ルーメンの基端側まで延在する少なくとも2本の針基端部12cと、前記針基端部12c同士をカテーテル1の内部で結合する針結合部12dと、を備えている。
(もっと読む)
ループ状支持ストラット要素を備えた塞栓フィルターフレーム
【課題】縦方向の追従性が改善され、容器壁に対するシールが改善され、デリバリプロファイルが小さく、フレーム及びつなぎ留め要素により占められる展開長さを短くできる塞栓フィルターを提供する。
【解決手段】本発明は1つの態様は、塞栓フィルターであって、
縦軸を有する支持ワイヤと;
取付け点で前記支持ワイヤに取付けた複数の支持ストラットを備えた塞栓フィルターフレームと;を備え、
前記フレームが、拘束された供給状態と非引張り展開状態を有し;
前記塞栓フィルターが、遠位及び近位端を有し;
前記フレームが、非引張り展開状態にあるときに、フィルター開口を有し;
前記フィルターの開口が、支持ワイヤ縦軸に実質的に直交する平面を規定し;
前記ストラット取付け点が、前記フィルター開口の平面から遠位に位置している、塞栓フィルターである。
(もっと読む)
毛嚢ユニットの採収および移植用の自動システム
【課題】画像ガイドロボットシステムなどのロボットシステムが、正確に制御された毛嚢ユニットの採収および移植を実施するロボットシステムを提供する。
【解決手段】ロボットアーム27と、当該ロボットアームに搭載された採収および/または移植カニューレ38、36と、前記ロボットアーム27に搭載された1またはそれ以上のカメラ28と、前記1またはそれ以上のカメラで撮像された画像を受信して処理するよう構成されたプロセッサと、前記プロセッサに機能的に接続され前記ロボットアームの配置の少なくとも一部を前記1またはそれ以上ののカメラで撮像された画像に基づいて制御するよう構成されたコントローラとを具え、前記ロボットアームは前記カニューレが近接する体表面に対し所望の向きとなるよう位置決め可能であることを特徴とするロボットシステム25である。
(もっと読む)
幽門係留デバイスおよび方法
【課題】患者の胃腸消化管中で一またはそれ以上の機能を実行するデバイス、方法、およびシステムを提供する。
【解決手段】デバイスは係留部材と、この係留デバイス46に連結した少なくとも一のアクチュエータ、センサ、またはこれらの組み合わせを具える。係留デバイス46は、デバイス46の少なくとも一部を患者の胃74の幽門部に維持し、胃組織に直接的に取り付けることなく、胃組織に間欠的に係合させるように構成されている。アクチュエータが、組織へのエネルギィの送出、栄養の吸収を遅らせるスリーブとしての稼動、胃74の中のスペースの占有、薬剤の溶出、及び/又はその他といった好適な機能を実行する。センサは、pH、温度、胆汁含有率、栄養分含有率、脂肪、糖、アルコール、オピエート、薬物、分析物、電解質、及び/又はヘモグロビンなどの、患者の胃腸消化管中の患者の好適な特徴を検出するように構成されている。
(もっと読む)
解剖学的なオリフィス又は内腔の内周を制御するための方法及び装置
【課題】解剖学的な構造又は内腔の形状及びサイズの少なくとも一方を制御するための移植可能な装置を提供する。
【解決手段】移植部材10は、円形の移植部材本体15を含み、この円形の移植部材本体15は、狭い中間のネック部分を有するグロメット状の取り付け手段25と交互に介在する調整可能な波形部分20を備えている。調整ツールは、解剖学的な構造又は内腔がほぼ正常から正常な生理学的機能を再開する前、再開している間、及び再開した後に、調整可能な部材20を作動させて調整を行うように構成される。
(もっと読む)
外側から適用する患者インタフェースシステムおよび方法
【課題】患者用インタフェースを利用して分離した組織の閉塞を強化するシステムおよび方法を提供する。
【解決手段】第1の流体移動構成要素FTC1は、液体を運ぶ特性を有するレイヨンなどの多孔性素材のストリップを具えている。FTC1は、浸出する流体を移動させるために縫合線上に直接配置できる。FTC.2は、ポリウレタンエーテルなどの好適な疎水性フォーム材を具えており、FTC1と連通するアンダードレープのスロットの上に配置される。負圧力が、接続用の流体移動構成要素FTC.3を介してFTC2に加わるように構成されている。組織閉塞方法は、所定の量の流体が排水されたときに吸引を中止するための自動遮断装置を有する手動式吸引装置を利用して手動で操作する方法を具える。自動操作方法は、様々な患者および操作状況に応答するように予めプログラム可能なマイクロプロセッサを利用する。
(もっと読む)
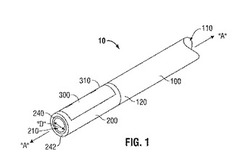
光照射型美容装置
【課題】除毛部により切断されて生成された毛屑によって光照射部に悪影響を与えにくい光照射型美容装置を提供する。
【解決手段】本発明の光照射型美容装置は、固定刃300と可動刃301とを有する除毛部3と、この除毛部3に並設されて生体表面9に光照射を行う光照射部4とを備えた光照射型美容装置である。前記除毛部3と前記光照射部4との間に、前記除毛部3によって切断された毛が前記光照射部4側へ進入するのを防止する毛屑進入阻止部6が設けられている。
(もっと読む)
91 - 100 / 2,301
[ Back to top ]