
進路案内装置、進路案内方法およびプログラム
【課題】装置間の通信を行いながら、各々の装置の位置関係において適切な進路案内を行うことを可能とする。
【解決手段】通信制御部202は、位置情報取得部201によって取得した自装置の現在位置情報を登録された他装置に送信し、他装置における現在位置情報を受信する制御を行う。位置関係判断部203は、自装置の現在位置情報および他装置における現在位置情報に基づいて自装置が他装置より進行方向に対して先行しているか否かを判断する。動作モード決定部204は、自装置が他装置より進行方向に対して先行していると判断された場合は自装置を親機として動作させ、自装置が他装置より進行方向に対して先行していないと判断された場合は自装置を子機として動作させる。機能選択部206は、親機としては進行方向情報を他装置へ送信させる機能を動作させ、子機としては親機より送信された進行方向情報を受信させる機能を動作させる。
【解決手段】通信制御部202は、位置情報取得部201によって取得した自装置の現在位置情報を登録された他装置に送信し、他装置における現在位置情報を受信する制御を行う。位置関係判断部203は、自装置の現在位置情報および他装置における現在位置情報に基づいて自装置が他装置より進行方向に対して先行しているか否かを判断する。動作モード決定部204は、自装置が他装置より進行方向に対して先行していると判断された場合は自装置を親機として動作させ、自装置が他装置より進行方向に対して先行していないと判断された場合は自装置を子機として動作させる。機能選択部206は、親機としては進行方向情報を他装置へ送信させる機能を動作させ、子機としては親機より送信された進行方向情報を受信させる機能を動作させる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、複数の装置間で通信を行うことによって適切な進路案内を行う進路案内装置、進路案内方法およびプログラムに関する。
【背景技術】
【0002】
携帯型のナビゲーション装置が普及しており、自動車における利用に加えて自転車や徒歩での利用機会も増加している。このようなナビゲーション装置は、単独での利用を前提としたものが多く、複数のナビゲーション装置間で通信を行う利用であっても、複数のナビゲーション装置間の位置情報を共有するものであることが多い(例えば特許文献1)。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2003−139546号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
このようなナビゲーション装置においては、複数のナビゲーション装置間において各々の位置情報は共有されているものの、進路案内は各々の装置において個別に行われている。このため、ナビゲーション装置間の進路情報の共有は、別途音声通信を用いるなど、迅速性や安全性に問題がある場合があった。
【0005】
本発明はこのような問題点に鑑みなされたものであり、装置間の通信を行いながら、各々の装置の位置関係において適切な進路案内を行う進路案内装置、進路案内方法およびプログラムを提供する。
【課題を解決するための手段】
【0006】
上記目的を達成するために、第1の発明に係る進路案内装置(10)は、自装置の現在位置情報を取得する位置情報取得部(201)、前記位置情報取得部(201)によって取得した自装置における現在位置情報を予め登録された他装置に送信し、前記予め登録された他装置における現在位置情報を受信する制御を行う通信制御部(202)、前記位置情報取得部(201)によって取得した自装置の現在位置情報および前記通信制御部(202)の制御によって取得した他装置における現在位置情報によって判別した自装置の進行方向に対する自装置と他装置との位置関係に基づいて、自装置が他装置より進行方向に対して先行しているか否かを判断する位置関係判断部(203)、前記位置関係判断部(203)において、自装置が他装置より進行方向に対して先行していると判断された場合は、自装置を親機として動作させ、自装置が他装置より進行方向に対して先行していないと判断された場合は、自装置を子機として動作させる動作モード決定部(204)、前記動作モード決定部(204)において、自装置が親機であると判断された場合は、進行方向を示す進行方向情報を前記通信制御部(202)により他装置へ送信させる機能を動作させ、自装置が子機であると判断された場合は、親機であると判断されている他装置より進行方向情報を前記通信制御部(202)によって受信させる機能を動作させる機能選択部(205)、を備えることを特徴とする。
【0007】
第2の発明に係る進路案内装置(10)は、第1の発明において、前記動作モード決定部(204)において自装置が子機であると判断された場合は、前記機能選択部(205)によって動作された機能によって他装置より受信した前記進行方向情報を表示させる制御を行う表示制御部(206)をさらに備えることを特徴とする。
【0008】
第3の発明に係る進路案内装置(10)は、第2の発明において、前記表示制御部(206)は、前記機能選択部(205)によって動作された機能によって他装置より受信した前記進行方向情報を、前記通信制御部(202)の制御によって取得した親機であると判断されている他装置において進行方向を送信した時点での現在位置情報に基づき表示させる制御を行うことを特徴とする。
【0009】
第4の発明に係る進路案内装置(10)は、第1から第3の発明におけるいずれか1の発明において、前記動作モード決定部(204)において自装置が子機であると判断された場合は、前記機能選択部(205)は、前記受信した進行方向情報に対して進行方向確認情報を前記通信制御部(202)によって送信させる機能を動作させることを特徴とする。
【0010】
第5の発明に係る進路案内方法は、自装置の現在位置情報を取得する現在位置情報取得ステップ、前記現在位置情報取得ステップにおいて取得した自装置の現在位置情報の送信と他装置の現在位置情報の取得を、予め登録された装置間で通信することにより相互に行う位置情報送受信ステップ、前記現在位置情報取得ステップにおいて取得した自装置の現在位置情報および前記位置情報送受信ステップにおいて取得した他装置における現在位置情報に基づき、自装置の進行方向に対する他装置との位置関係を判断する位置関係判断ステップ、前記位置関係判断ステップにおいて、自装置が他装置より進行方向に対して先行していると判断された場合は、自装置を親機として動作させ、自装置が他装置より進行方向に対して先行していないと判断された場合は、自装置を子機として動作させる動作モード決定ステップ、前記動作モード決定ステップにおいて、自装置が親機であると判断された場合は、進行方向を示す進行方向情報を前記通信制御部(202)により他装置へ送信させる機能を動作させ、自装置が子機であると判断された場合は、親機であると判断されている他装置より進行方向情報を前記通信制御部(202)により受信させる機能を動作させる機能選択ステップ、を備えることを特徴とする。
【0011】
第6の発明に係るプログラムは、進路案内装置(10)が備えるコンピュータを、自装置の現在位置情報を取得する現在位置情報取得ステップ、前記現在位置情報取得ステップにおいて取得した自装置の現在位置情報の送信と他装置の現在位置情報の取得を、予め登録された装置間で通信することにより相互に行う位置情報送受信ステップ、前記現在位置情報取得ステップにおいて取得した自装置の現在位置情報および前記位置情報送受信ステップにおいて取得した他装置における現在位置情報に基づき、自装置の進行方向に対する他装置との位置関係を判断する位置関係判断ステップ、前記位置関係判断ステップにおいて、自装置が他装置より進行方向に対して先行していると判断された場合は、自装置を親機として動作させ、自装置が他装置より進行方向に対して先行していないと判断された場合は、自装置を子機として動作させる動作モード決定ステップ、前記動作モード決定ステップにおいて、自装置が親機であると判断された場合は、進行方向を示す進行方向情報を前記通信制御部(202)により他装置へ送信させる機能を動作させ、自装置が子機であると判断された場合は、親機であると判断されている他装置より進行方向情報を前記通信制御部(202)により受信させる機能を動作させる機能選択ステップ、として動作させることを特徴とする。
【発明の効果】
【0012】
本発明によれば、複数の装置間で通信を行うことによって、各々の位置関係において適切な進路案内を行うことができる。
【図面の簡単な説明】
【0013】
【図1】本発明に係る進路案内装置の構成例を表すブロック図である。
【図2】本発明に係る進路案内装置の入力部の構成例を表すブロック図である。
【図3】本発明に係る進路案内装置の出力部の構成例を表すブロック図である。
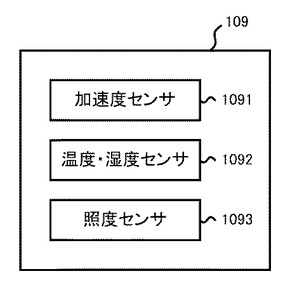
【図4】本発明に係る進路案内装置のセンサ部の構成例を表すブロック図である。
【図5】本発明に係る進路案内装置の制御部の構成例を表すブロック図である。
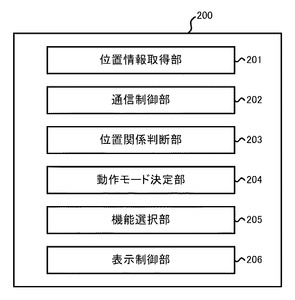
【図6】本発明に係る進路案内装置の制御部による機能構成例を表すブロック図である。
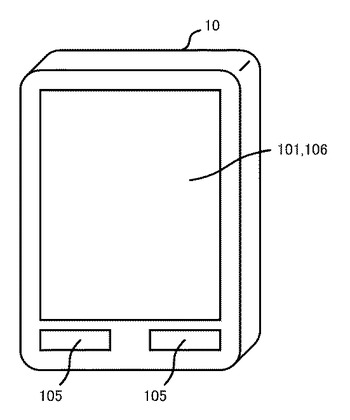
【図7】本発明に係る進路案内装置の外観斜視図の例である。
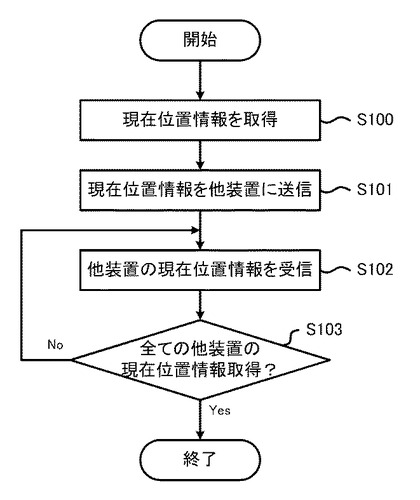
【図8】本発明に係る進路案内装置の第1の実施例としての動作例を表すフローチャートである。
【図9】本発明に係る進路案内装置の第1の実施例としての動作例を表すフローチャートである。
【図10】本発明に係る進路案内装置の第1の実施例として、親機および子機における画面表示例である。
【図11】本発明に係る進路案内装置の第1の実施例として、親機および子機における画面表示例である。
【図12】本発明に係る進路案内装置の第1の実施例として親機における動作例を表すフローチャートである。
【図13】本発明に係る進路案内装置の第1の実施例として子機における動作例を表すフローチャートである。
【図14】本発明に係る進路案内装置の第1の実施例として親機および子機における画面表示例である。
【図15】本発明に係る進路案内装置の第1の実施例として親機および子機における画面表示例である。
【図16】本発明に係る進路案内装置の第2の実施例として親機における動作例を表すフローチャートである。
【図17】本発明に係る進路案内装置の第2の実施例として子機における動作例を表すフローチャートである。
【図18】本発明に係る進路案内装置の第3の実施例として親機における動作例を表すフローチャートである。
【図19】本発明に係る進路案内装置の第3の実施例として子機における動作例を表すフローチャートである。
【図20】本発明に係る進路案内装置の第4の実施例として親機における動作例を表すフローチャートである。
【図21】本発明に係る進路案内装置の第4の実施例として子機における動作例を表すフローチャートである。
【図22】本発明に係る進路案内装置の第5の実施例として親機および子機における画面表示例である。
【発明を実施するための形態】
【0014】
以下、本発明における進路案内装置10について、図1から図7を参照して説明する。
【0015】
進路案内装置10は、複数の進路案内装置10の間で通信可能なナビゲーション装置であり、単体では通常のナビゲーション装置として用いることができる。進路案内装置10は、携帯型や車載のナビゲーション装置であるが、携帯電話やスマートフォン、タブレット端末等の各種装置におけるアプリケーションとして動作するようにしてもよい。
【0016】
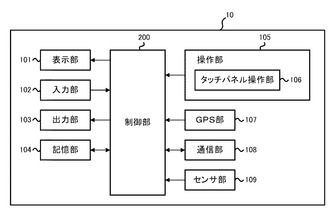
進路案内装置10は図1に示すように、表示部101、記憶部104、操作部105、GPS部107、通信部108を備え、必要に応じて入力部102、出力部103、センサ部109、制御部200等を備える。また、図示しないが各部を動作させるための電源を供給する電源部も備える。
【0017】
表示部101は、例えば液晶表示素子や有機EL(Electro Luminescence)表示素子等からなり、後述する表示制御部206の制御によって、表示内容や表示形態が制御される。また、表示部101には表示制御部206の制御によってタッチパネル操作部106への操作位置を示すための操作アイコン等が表示される。
【0018】
記憶部104は、表示部101に表示する地図データや表示内容のデータ、通信可能な他の進路案内装置10を識別する登録情報等を記憶し、制御部200の制御により記憶処理や読み出し処理が行われる。記憶部104は、例えばHDD(Hard Disk Drive)やフラッシュメモリより構成される。また、記憶部104は進路案内装置10に内蔵されるものに限らず、入力部102や出力部103として機能する所定のインターフェースや所定の接続端子に接続される外部の記憶デバイスであってもよい。外部の記憶デバイスの一例としては、USB(Universal Serial Bus)端子に接続されるUSBメモリや外部HDD装置、所定のメモリカードスロットにより接続されるメモリカードなどである。
【0019】
操作部105は、進路案内装置10に対してユーザが各種処理や動作を指示するためのユーザインターフェースである。操作部105は、例えば押ボタン式や回転式の操作手段を含み、表示部101に重ねて設けられたタッチパネル操作部106を含む。操作部105に入力された信号は、制御部200の処理により指示内容に基づき各部の操作や各種処理が実行される。
【0020】
GPS部107は、GPS(Global Positioning System)衛星からの電波を受信し、受信した信号を制御部200に送信する。GPS部107は、GPS衛星からの電波を受信する図示しないGPSアンテナを含む。また、GPS部107から取得した信号に基づいた演算を制御部200により行うことにより、進路案内装置10の現在位置を表す現在位置情報を得ることができる。
【0021】
通信部108は、他の進路案内装置10との相互の通信を行う通信モジュール等であり、一例としてはWi−Fi(Wireless Fidelity:登録商標)回線、携帯電話回線、特定省電力無線などを用いることができる。通信部108は、図示しないが利用する通信形態に適合したアンテナを備える。通信部108は、制御部200の制御により所定の情報を他の進路案内装置10との通信によって送受信する。
【0022】
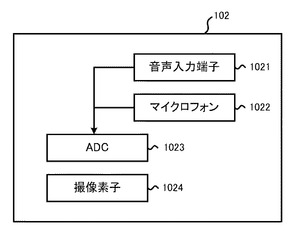
図2は、入力部102の構成例を示したブロック図である。入力部102は、外部からのアナログ音声信号やデジタル音声データ、映像データの入力が可能な音声入力端子1021や、進路案内装置10に内蔵されるマイクロフォン1022や撮像素子1024等により構成される。入力部102から入力された各種データは制御部200によって、デコード処理や記憶部104への記憶処理等が行われる。さらに入力部102は、外部から入力されるアナログ信号をデジタルデータに変換するADC(Analog Digital Converter)1023を包含してもよい。
【0023】
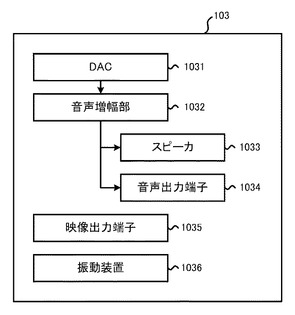
図3は、出力部103の構成例を示したブロック図である。出力部103は、各種データを出力する出力装置や出力端子等である。出力部103は、制御部10から出力されるデジタルデータをアナログ信号に変換するDAC(Digital Analog Converter)1031、DAC1031により変換されたアナログ信号または制御部200から出力されるデジタルデータを増幅する音声増幅部1032を包含してもよい。また、出力部103は音声信号を出力するスピーカ1033やヘッドフォン端子等の音声出力端子1034、映像信号を出力する映像出力端子1035、さらにはユーザへの通知を振動として出力する振動装置1036であってもよい。
【0024】
入力部102および出力部103は、記憶部104を構成する可搬型記録媒体等の接続部であってもよく、例えば図示しないメモリカードを接続するメモリカードスロット、USBメモリ、外部HDDを接続するUSB端子などである。
【0025】
図4は、センサ部109の構成例を示したブロック図である。センサ部109は、進路案内装置10の各種状態を検出するセンサであり、例えば加速度センサ1091、温度・湿度センサ1092、照度センサ1093等から構成される。各種センサからの出力は制御部200によって演算され、各々のセンサからの出力値に応じた処理や制御が実行される。
【0026】
図5は、制御部200の構成例を示したブロック図である。制御部200は、例えば、CPU(Central Processing Unit)2001、RAM(Random Access Memory)2002、ROM(Read Only Memory)2003、DSP(Digital Signal Processor)2004等により構成され、ROM2003に記憶された各種プログラムをRAM2002上で実行することにより進路案内装置10の各部の制御や各部より入力された信号の処理、各種データやファイルの処理を行う。
【0027】
制御部200におけるDSP2004は、入力部102より入力される画像データや音声データを圧縮データに変換するエンコード処理、記憶部104記憶されている各種圧縮データをデコードするデコード処理に加えて、音質補正や画像調整等の各種処理を行う。
【0028】
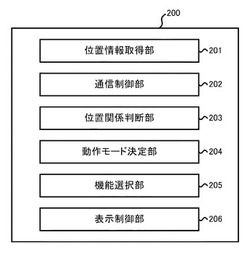
制御部200は、前述したプログラムの実行により、各種機能を実現する。図6は、制御部200により実現される機能例をしめした機能ブロック図である。制御部200は、、位置情報取得部201、通信制御部202、位置関係判断部203、動作モード決定部204、機能選択部205、表示制御部206としての機能を実現する。
【0029】
位置情報取得部201は、GPS部107から送信された現在位置におけるGPS衛星からの信号を取得し、例えば緯度経度情報としての現在位置情報を演算によって取得する。位置情報取得部201は、現在位置情報の取得を例えば1秒毎や5秒毎など所定時間毎に実行し、取得された現在位置情報は記憶部104に記憶される。現在位置情報の取得間隔や取得タイミングは上述したものに限らず、進路案内装置10の動作状況によって取得間隔を変化させたり、制御部200によって動作する機能に取得タイミングを決定させてもよい。
【0030】
通信制御部202は、通信部108による各種情報の送受信動作を制御する。具体的には、位置情報取得部201により取得した自装置の現在位置情報を予め登録した他の進路案内装置10に送信させる。また、予め登録された他の進路案内装置10における現在位置情報を受信させる。さらには、ユーザによって指示された進行方向情報および進行方向確認情報を予め登録した他の進路案内装置10に送信させ、他の進路案内装置10によって送信された進行方向情報および進行方向確認情報を受信させる。
【0031】
通信制御部202は、上述した情報の送受信制御に加えて、自装置を含む複数の進路案内装置10間における登録処理を制御してもよい。例えばBlutooth(登録商標)通信やWi−Fi通信を用いた装置間相互の登録処理である。
【0032】
位置関係判断部203は、位置情報取得部201により取得した自装置の現在位置情報および通信制御部202による通信によって取得した他装置の現在位置情報に基づき、自装置と他の進路案内装置10の双方の進行方向における前後関係を判断する。具体的には、自装置における位置情報取得部201において取得した現在位置情報とその現在位置情報の所定時間における推移に基づく進行方向、さらに通信制御部202によって取得した予め登録された他の進路案内装置10の現在位置情報を対比演算することによって、進行方向に対する位置関係を求め、自装置が他装置より進行方向に対して先行しているか否かを判断する。位置関係判断部203は、位置情報取得部201による現在位置情報の取得および通信制御部202による他の進路案内装置10の現在位置情報の取得毎に位置関係を判断する。
【0033】
動作モード決定部204は、位置関係判断部203によって判断された結果に基づき、自装置が親機モードとして動作するか子機モードとして動作するかを決定する。具体的には、動作モード決定部204において、自装置が予め登録された全ての他装置より進行方向に対して先行していると判断された場合は、自装置を親機モードとして動作させ、そうでない場合には自装置を子機モードとして動作させる決定を行う。
【0034】
機能選択部205は、動作モード決定部204において決定した動作モードに基づき、進路案内装置10に所定の機能を動作させる。具体的には、進路案内装置10が親機である場合には、親機としての動作の一例として、子機としての進路案内装置10に対して方向指示情報の送信を可能とさせる。また、進路案内装置10が子機である場合には、子機としての動作の一例として、親機としての進路案内装置10から送信された方向指示情報の受信を可能とさせる。
【0035】
表示制御部206は、進路案内装置10が備える表示部101や進路案内装置10に接続される表示部101に対して、各種情報を表示させる制御を行う。具体的には、現在位置情報に基づく地図画面300や地図画面300上の自装置や他装置の位置や進行方向を示す各種アイコン、親機として判断された進路案内装置10における方向指示画面310、子機として判断された進路案内装置10における方向確認画面317、これらに加えて各種処理状況や動作を示すアイコンや図形、文字、タッチパネル操作部106の操作位置に対応した各種操作アイコン等を表示させる。
【0036】
次に、図7に示す進路案内装置10外観斜視図について説明する。図7は進路案内装置10の一例として、ポータブル型の装置に適用したときの外観斜視図である。図7の例で示す進路案内装置10は、例えば矩形の筐体を有し、その筐体の1面に表示部101およびタッチパネル操作部106を備え、さらに操作部105を備える。
【0037】
進路案内装置10は、矩形に限らずどのような形態であってもよいが、表示部101が備えられている面は平面であることが好ましい。また、操作部105は進路案内装置10のいずれの面に備えられていてもよい。
【0038】
進路案内装置10は、ユーザが持ち歩く場合や自転車等に装着して使用する場合、防水性能を備えていることが好ましい。また、図示しないが表示部101の反対の面に自転車等に装着するための装着機構が備えられていてもよい。
【0039】
次に、本発明における第1の実施例に係る進路案内装置10の動作について図8から図15に基づき説明する。本発明に関わる各実施例は、いずれも複数の進路案内装置10が予め相互に登録されていることを前提とする。複数の進路案内装置10は、ほぼ同時に同一方向へ向かう複数のユーザにより各々所持されるものであり、例えば複数のユーザにより構成される登山やトレッキングを行うグループ、サイクリングやツーリングを行うグループ等である。
【0040】
また、本発明に関わる各実施例は、いずれも複数の進路案内装置10が通信部108により相互に通信可能であることを前提とする。通信部108による相互の通信方式は、前述したようにWi−Fiや携帯電話回線、特定省電力無線等その方式は問わない。
【0041】
図8は、本発明に関わる第1の実施例において、自装置の現在位置情報を取得し、予め登録された進路案内装置10との間で各々の現在位置情報を共有する動作を表すフローチャートである。
【0042】
図8において、先ず進路案内装置10の位置情報取得部201は、自装置の現在位置情報を取得する(ステップS100)。現在位置情報は、例えば緯度経度による情報であり、GPS部107において受信し出力されるGPS衛星からの受信情報を演算することにより取得する。位置情報取得部201は、自装置の現在位置情報を所定時間間隔で逐次取得する。
【0043】
ステップS100において現在位置情報を取得した後、通信制御部202は通信部108を制御して予め登録された他の進路案内装置10にステップS100で取得した現在位置情報を送信する(ステップS101)。
【0044】
ステップS101の処理後、通信制御部202は通信部108を制御して予め登録された他の進路案内装置10より各々の現在位置情報を取得する(ステップS102)。ステップS102において他装置の現在位置情報を受信した場合、通信制御部202は予め登録された全ての他の進路案内装置10における現在位置情報を取得したか否かを判断する(ステップS103)。
【0045】
ステップS103において、全ての他の進路案内装置10における現在位置情報を取得していないと判断された場合は(ステップS103:No)、再度ステップS103の処理を実行する。ステップS103において、全ての他の進路案内装置10における現在位置情報を取得したと判断された場合は(ステップS103:Yes)、本処理を終了する。
【0046】
図8において、ステップS100からステップS101の処理、およびステップS102からステップS103の処理は前後してもよく、予め登録された複数の進路案内装置10において相互に各々の最新の現在位置情報を共有できればよい。
【0047】
図8におけるステップS100の処理は、本発明の進路案内装置10によって実現される進路案内方法および進路案内装置10が備えるコンピュータによって実行される、現在位置情報取得ステップに該当する。
【0048】
図8におけるステップS101からステップS103までの処理は、本発明の進路案内装置10によって実現される進路案内方法および進路案内装置10が備えるコンピュータによって実行される、位置情報送受信ステップに該当する。
【0049】
図9は、図8により説明した進路案内装置10の動作によって取得した自装置の位置情報および他装置の位置情報に基づく相互の位置関係の判断により動作モードを決定する動作を表すフローチャートである。
【0050】
図9において、位置関係判断部203は、ステップS100において取得した自装置の現在位置情報および通信制御部202による通信によって取得した他装置の現在位置情報を対比し、自装置と他の進路案内装置10の進行方向における前後関係を判断する(ステップS110)。ステップS110において、位置関係判断部203は、自装置の現在位置情報の座標および自装置の所定時間における現在位置の推移によって進行方向を演算し、自装置の現在位置情報に対して他装置の現在位置情報が進行方向に存在するか、進行方向の逆方向に存在するかを演算により求める。
【0051】
ステップS110において、自装置の現在位置情報と他装置の現在位置情報との進行方向に対する位置関係を判断した後、位置関係判断部203は他の進路案内装置10における現在位置情報毎に、自装置の現在位置が進行方向に対して他装置の現在位置より先行しているか否かを判断する(ステップS112)。ステップS112において、位置関係判断部203は自装置の現在位置情報を表す座標情報が、他装置の現在位置情報を表す座標情報に対して、進行方向に存在するか否かを演算により求め、進行方向に存在する場合は先行していると判断し、進行方向に存在しないときは先行していないと判断する。
【0052】
ステップS112において、自装置が他の進路案内装置10より先行していないと判断された場合は(ステップS112:No)、予め登録された他の進路案内装置10におけるいずれかの進路案内装置10に自装置が先行していないため、ステップS115において動作モード決定部204は自装置を子機モードとして動作させ、本処理を終了する。
【0053】
ステップS112において、自装置が他の進路案内装置10より先行していると判断された場合は(ステップS112:Yes)、位置関係判断部203は予め登録されている全ての他の進路案内装置10における現在位置情報との対比が完了したか否かを判断する(ステップS113)。
【0054】
ステップS113において、全ての他の進路案内装置10との現在位置情報の対比が完了していないと判断された場合は(ステップS113:No)、ステップS110に戻り、現在位置情報の対比がまだ行われていない他の進路案内装置10における現在位置情報との対比を行う。ステップS113において、全ての他の進路案内装置10との現在位置情報の対比が完了したと判断された場合は(ステップS113:Yes)、自装置は予め登録された全ての他の進路案内装置10に対して進行方向に先行しているため、ステップS114において動作モード決定部204は自装置を親機モードとして動作させ、本処理を終了する。
【0055】
図9におけるステップS110からステップS113の処理は、本発明の進路案内装置10によって実現される進路案内方法および進路案内装置10が備えるコンピュータによって実行される、位置関係判断ステップに該当する。
【0056】
図9におけるステップS114およびステップS115の処理は、本発明の進路案内装置10によって実現される進路案内方法および進路案内装置10が備えるコンピュータによって実行される、動作モード決定ステップに該当する。
【0057】
図9に示す処理は、各々の進路案内装置10における最新または最新に近い現在位置情報に基づき逐次実行される。このため、子機であった進路案内装置10が親機であった進路案内装置10を進行方向に対して追い越すことで親機として動作し、親機であった進路案内装置10が子機であった進路案内装置10に進行方向に対して追い越されることで子機として動作する。
【0058】
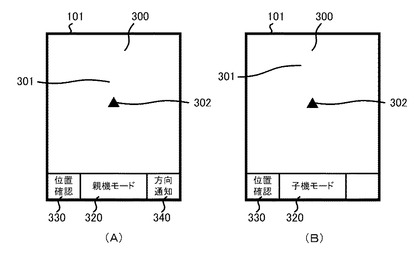
次に、図9の処理によって判断された親機または子機としての動作例としての表示画面例を図10および図11用いて説明する。図10は表示部101に地図画面300が表示され、地図画面300上に自装置の現在位置が自位置アイコン302として表示されている状態を示す。また、図10(A)は進路案内装置10が親機である場合の表示例であり、図10(B)は進路案内装置10が子機である場合の表示例である。
【0059】
図10における自位置アイコン302は地図画面300のほぼ中央部に進行方向を表示部101の上部を向けた状態で表示される。進路案内装置10の移動に伴い、地図画面300は常に最新の現在位置を中心とし進行方向を上部としながら、移動および回転表示される。また、地図画面300には交差点301が表示されている。
【0060】
表示部101には、地図画面300に加えてモード表示部320、位置確認操作部330、方向通知操作部340が表示される。方向通知操作部340は子機には表示されない。位置確認操作部330および方向通知操作部340は、タッチパネル操作部106による操作可能な操作アイコンである。位置確認操作部330および方向通知操作部340は、タッチパネル操作部106による操作に限らず、進路案内装置10の筐体上に備えられた操作部105や、図示しないリモコン装置によるものであってもよい。
【0061】
モード表示部320は、自装置が親機である場合は親機モードで動作していることを表示し、自装置が子機である場合は子機モードで動作していることを表示する。 位置確認操作部330は、操作されることによって図11に示すように地図画面300上に他の進路案内装置10の現在位置を表示させる。方向通知操作部340は、操作されることによって図14(A)に例示するような方向指示画面310を表示させ、方向指示を可能とさせる。
【0062】
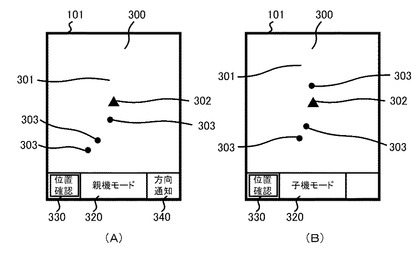
図10の状態で、位置確認操作部330がユーザによって操作されると、図11に示すように、通信制御部202によって取得された他の進路案内装置10の現在位置情報に基づいて、表示制御部206は地図画面300上に他の進路案内装置10の現在位置を他装置位置アイコン303として表示させる。図11における位置確認操作部330の形状は、位置確認操作部330がユーザにより操作され、位置確認を行っていることを示している状態の例を表している。
【0063】
図11(A)は、自装置が親機であるため、自位置アイコン302の進行方向後方に子機である他装置位置アイコン303が表示されている。図11(B)は、自装置が子機であるため、自位置アイコン302の進行方向前方に親機である他装置位置アイコン303が表示され、自位置アイコン302の進行方向後方に他の子機である他装置位置アイコン303が表示されている。
【0064】
図10または図11に示す状態において方向通知操作部330が操作されたときの処理を図12および図13に示す。また、図12および図13の動作時における表示例を図14および図15に示す。
【0065】
図12および図13における各処理は、本発明の進路案内装置10によって実現される進路案内方法および進路案内装置10が備えるコンピュータによって実行される機能選択ステップとして選択された機能に該当する。
【0066】
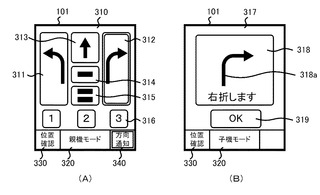
図12の処理は、親機であると判断された進路案内装置10においてユーザが方向通知操作部340を操作したことが前提となる。方向通知操作部340が操作されると、親機においては図14(A)に例示する方向指示画面310が表示される。
【0067】
図14(A)における方向通知操作部340の形状は、方向通知操作部340がユーザにより操作され、方向通知が可能であることを示している状態の例を表している。方向通知操作部340の操作によって親機における表示部101に表示される方向指示画面310においては、指示対象となる方向に対応して、左折指示操作部311、右折指示操作部312、直進指示操作部313、停止指示操作部314、減速指示操作部315が表示され、さらに子機情報表示部316が表示される。左折指示操作部311、右折指示操作部312、直進指示操作部313、停止指示操作部314、減速指示操作部315は、タッチパネル操作部106により操作可能な操作アイコンである。
【0068】
図14(A)において、左折指示操作部11は操作することによって子機に左折を行うことを通知させる。右折指示操作部312は操作することによって子機に右折を行うことを通知させる。直進指示操作部313は操作することによって子機に直進することを通知させる。停止指示操作部314は操作することによって子機に停止することを通知させる。減速指示操作部315は操作することによって子機に減速することを通知させる。子機情報表示部316は、登録されている子機の数に応じた数の子機情報表示部316が表示されており、方向指示操作に応じて子機より受信した確認信号の有無を判別表示させる。
【0069】
図12において、先ず制御部200は進行方向を指示する操作が行われたか否かを判断する(ステップS201)。進行方向を指示する操作とは、図14(A)の表示画面において左折指示操作部311、右折指示操作部312、直進指示操作部313、停止指示操作部314、減速指示操作部315のいずれかに対するタッチパネル操作部106への操作である。
【0070】
図14(A)の例においては、ステップS201の操作として右折指示操作部312が操作された状態を示している。ユーザによるこのような指示は、親機としての進路案内装置10のユーザが、例えば進行方向に交差点があることを目視または地図画面300の表示等により確認し、その交差点に対しての進行方向を子機としての進路案内装置10のユーザに通知する際に行う。また、交差点に限らず必要に応じて停止指示操作部314による停止指示や減速指示操作部315による減速指示等も行うことができる。
【0071】
ステップS201において進行方向を指示する操作が行われていないと判断された場合は(ステップS201:No)、ステップS201の判断を再度実行する。ステップS201において進行方向を指示する操作が行われたと判断された場合は(ステップS201:Yes)、通信制御部202はステップS201の処理で行われた進行方向を指示する操作による進行方向情報を通信部108によって他の進路案内装置10に送信させる(ステップS202)。
【0072】
ステップS202において進行方向情報が送信される他の進路案内装置10は、予め登録された進路案内装置10において子機であると判断された進路案内装置10である。ステップS202において子機に対して進行方向情報が送信されることによって、子機である進路案内装置10より進行方向情報を確認したことに基づく返信が受理される(ステップS203)。
【0073】
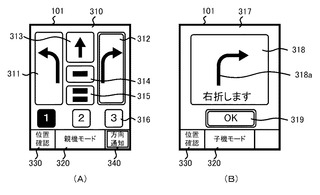
ステップS203において、通知した進行方向情報に対して子機としての進路案内装置10より返信を受信した場合は、図15(A)に示すように子機情報表示部316における返信を受信した子機に対応するアイコンの状態を変化させる。これにより、後続する子機である進路案内装置10のユーザが進行方向を確認したことを把握することができる。
【0074】
子機情報表示部316は、相互に登録されている進路案内装置10のうち子機として判断されている進路案内装置10が3台ある場合には子機情報表示部316が3個表示される。子機情報表示部316には数字が表示されているが、子機からの返信を受信した順に1から割り振ってもよく、相互の登録時に予め個々の進路案内装置10に番号を付与し、付与した番号に基づく表示であってもよい。その場合、1の番号を付与された進路案内装置10が親機として判断されている場合は、1以外の番号を付した子機情報表示部316が表示される。
【0075】
ステップS203において子機としての進路案内装置10からの返信を受信している間、通信制御部202は予め登録された進路案内装置10における子機としての進路案内装置10の全てからの返信があったか否かを判断する(ステップS204)。
【0076】
ステップS204において、全ての子機からの返信が確認できていない場合は(ステップS204:NO)、ステップS204の処理を再度実行する。しかし子機からの返信は子機のユーザによって実行されるため、必ずしも確実に実行されるとは限らない。このため、ステップS201における方向指示操作を行った時点より所定時間経過した場合や所定距離移動した場合はステップS204の処理を停止してもよい。または、ステップS201において行った方向指示操作が右左折や直進の指示であった場合は、位置情報取得部201によって取得している自装置の現在位置情報に基づき、方向操作指示がなされた位置から進行方向に存在する交差点を通過したと判断された場合にステップS204の処理を停止させてもよい。
【0077】
ステップS204において、全ての子機からの返信が確認できた場合(ステップS204:Yes)または上述したステップS204の処理が停止された場合は、本処理を終了する。
【0078】
図13の処理は、子機であると判断された進路案内装置10における例えば図10(B)または図11(B)の状態において、通信制御部202が親機より進行方向情報を受信することによって開始される。図13において、通信制御部202は親機より進行方向情報を受信したか否かを判断する(ステップS211)。ステップS211の判断を行う親機からの進行方向情報の送信は図12のステップS202の処理に基づく。
【0079】
ステップS211において、親機より進行方向情報を受信していないと判断された場合は(ステップS211:No)、ステップS211の判断を再度実行する。親機より進行方向情報を受信したと判断された場合は(ステップS211:Yes)、表示制御部206は表示部101に図10(b)に示すような方向確認画面317を表示させるとともに、方向確認画面317における指示表示部318に親機より受信した進行方向情報に基づく進行方向を示す方向指示矢印317aを表示させる(ステップS212)。
【0080】
図14(B)に例示する方向確認画面317は、親機から送信された進行方向情報を表示する指示表示部318および指示表示部318に表示された進行方向情報を確認したことを親機に送信するための指示操作確認部319により構成される。
【0081】
ステップS212において進行方向情報が表示されると、制御部200は指示操作確認部319が操作されたか否かを判断する(ステップS213)。ステップS213において、指示操作確認部319が操作されていないと判断され場合は(ステップS213:No)、ステップS213の処理を再度実行する。ステップS213において、指示操作確認部319が操作されたと判断された場合は(ステップS213:Yes)、通信制御部202は指示操作確認部319が操作されたことによる確認信号を通信部108によって送信させ(ステップS214)、本処理を終了する。ステップS214によって送信した確認信号は親機におけるステップS203の処理によって確認される。
【0082】
図15(B)における指示操作確認部319の形状は、指示操作確認部319がユーザにより操作された状態の例を表している。この処理によって親機における子機情報表示部316は図15(A)に示すように子機からの返信があったことを示すように表示される。
【0083】
ステップS213の処理は、ユーザによる指示操作確認部319の操作に基づくため、必ずしも確実に実行されるとは限らない。このためステップS212における進行方向情報が表示された時点より所定時間経過した場合や所定距離移動した場合はステップS213の処理を停止させステップS214の処理を行わずに本処理を終了してもよい。
【0084】
本実施例の親機およぶ子機における処理の流れを図7に示す親機と子機の位置関係を用いて説明する。親機としての進路案内装置10に図11(A)に示す地図画面300が表示されており、親機に続いて移動している子機としての進路案内装置10に図11(B)に示す地図画面300が表示されている。ここで親機のユーザが前方に交差点301が存在し右折を要すると判断した場合に、方向通知操作部340をタッチ操作して図14(A)に示す方向指示画面130を表示させる。方向表示画面310を表示させた親機のユーザは、図11(A)に示す交差点301に到達する前の位置において、右折指示操作部312をタッチ操作すると、子機においては図11(B)に示す位置において図15(B)に示す方向確認画面317が表示される。
【0085】
次に、図15(B)に示すように、方向確認画面317の表示を確認した子機のユーザが指示確認操作部319のタッチ操作を行うと、親機においては図15(A)に示すように子機情報表示部317の表示が変更され、親機のユーザは番号1に対応つけられている子機のユーザが右折指示を確認したことが判断できる。
【0086】
上述したような動作によって、予め相互に登録された複数の進路案内装置10において、進行方向における位置関係によって自動的に親機と子機として動作するとともに、親機として判断された進路案内装置10は、子機として判断された進路案内装置10に対して進行方向情報を送信することが可能となる。このため、複数のユーザが同一方向への移動を行う際には、先頭を行くユーザが使用する進路案内装置10が煩雑な操作を行うことなく親機としての動作を行い、他のユーザに対して進行方向の指示および確認を行うことができる。
【0087】
また、子機においては親機における進行方向の指示に基づき何の操作を行うこともなく進行方向情報が表示されるため、安全且つ確実に進行方向の確認を行うことができる。さらに、進行方向の指示操作および確認操作をタッチパネル操作部106により行う場合は、例えば自転車による移動中であっても安全に上述した操作を行うことができる。
【0088】
次に、本発明における第2の実施例に係る進路案内装置10の動作について図16および図17に基づき説明する。図16は、本発明に関わる第2の実施例として、親機機としての動作処理を示したフローチャートであり、図17は子機としての動作処理を示したフローチャートである。第2の実施例における進路案内装置10の構成は第1の実施例と同一であり、共通する処理については同一符号を付すとともに説明を省略する。
【0089】
図16におけるステップS201において進行方向を指示する操作が行われたと判断された場合は(ステップS201:Yes)、通信制御部202はステップS201の処理で行われた進行方向を指示する操作による進行方向情報に加えて位置情報取得部201において取得した現在位置情報を通信部108によって他の進路案内装置10に送信させる(ステップS222)。ここで送信される現在位置情報は進行方向指示操作が行われた時点における現在位置情報であり、位置情報取得部201は、進行方向指示操作があったことを検出したことによりその時点での現在位置情報を取得してもよく、所定時間間隔で取得している現在位置情報に基づき進行方向指示操作の時点に直近の現在位置情報であってもよい。
【0090】
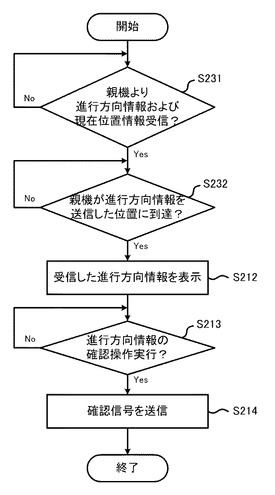
図17の処理の開始は、図12における第1の実施例と同様であるが、図17におけるステップS231において通信制御部202は親機より進行方向情報に加えて進行方向指示操作時点での親機における現在位置情報を受信したか否かを判断する(ステップS231)。ステップS231の判断を行う親機からの進行方向情報の送信は図16のステップS222の処理に基づく。
【0091】
ステップS221において、親機より進行方向情報および現在位置情報を受信していないと判断された場合は(ステップS231:No)、ステップS231の判断を再度実行する。親機より進行方向情報および現在位置情報を受信したと判断された場合は(ステップS231:Yes)、位置情報取得部201は自装置における現在位置が親機において進行方向指示操作が実行された位置に到達したか否かを判断する(ステップS232)。
【0092】
ステップS232の判断は、親機における進行方向指示操作が実行された位置情報に完全に一致する必要はなく、親機の位置情報に対して半径1mから5m程度の範囲内に入った場合に到達したと判断する。
【0093】
上述したような動作によって、第1の実施例と同一の効果に加えて、子機としての進路案内装置10は、親機としての進路案内装置10において進行方向の指示を行った地点またはその地点に近い位置に到達したときに、進行方向の指示が表示される。このため、親機から指示される進行方向を適用する交差点等を他の交差点等と誤って認識することなく、的確に指示を受けることができる。
【0094】
次に、本発明における第3の実施例に係る進路案内装置10の動作について図18および図19に基づき説明する。図18は、本発明に関わる第3の実施例として、親機機としての動作処理を示したフローチャートであり、図19は子機としての動作処理を示したフローチャートである。第3の実施例における進路案内装置10の構成は第1の実施例と同一であり、第1の実施例および第2の実施例と共通する処理については同一符号を付すとともに説明を省略する。
【0095】
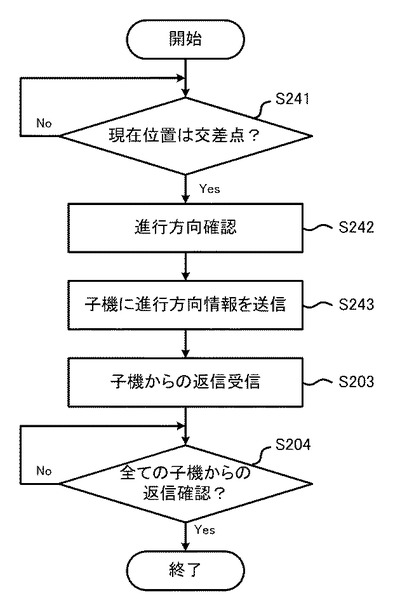
図18において、先ず制御部100は位置情報取得部201が取得した現在位置情報と地図データとに基づき、現在位置が交差点であるか否かを判断する(ステップS241。この判断は地図データにおける交差点としての位置情報を示す緯度経度データと完全に合致していなくとも、そのデータを中心に半径1mから10m程度の範囲内である場合に交差点であると判断する。この範囲は交差点を構成する道路の幅や道路の種別によって変更してもよい。
【0096】
ステップS241において、現在位置が交差点ではないと判断された場合は(ステップS241:No)、ステップS241の処理を再度実行する。ステップS241において、現在位置が交差点であると判断された場合は(ステップS241:Yes)、位置情報取得部201は交差点として判断された位置情報に対する前後の位置情報の推移によって交差点における進行方向を確認する(ステップS242)。
【0097】
ステップS242において交差点における進行方向を確認した後、通信制御部202はステップS242の処理によって確認した進行方向に基づく進行方向情報を通信部108によって子機としての他の進路案内装置10に送信させる(ステップS243)。
【0098】
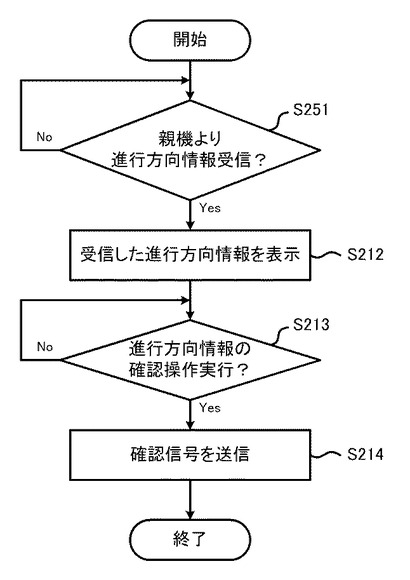
図19において、通信制御部202は親機より交差点における進行方向情報を受信したか否かを判断する(ステップS251)。
【0099】
本実施例の親機およぶ子機における処理の流れを図11に示す親機と子機の位置関係を用いて説明する。方向表示画面310を表示させた親機のユーザは、図11(A)に示す交差点301に到達する前の位置において、右折指示操作部312をタッチ操作すると、子機においては図11(B)に示す位置ではなく図11(B)における自装置アイコン302の位置より進行方向に表示されている親機が方向指示操作を行った他装置位置アイコン303の位置に到達した時点において図14(B)に示す方向確認画面317が表示される。
【0100】
上述したような動作によって、予め相互に登録された複数の進路案内装置10において、進行方向における位置関係によって自動的に親機と子機として動作するとともに、親機として判断された進路案内装置10は、子機として判断された進路案内装置10に対して自動的に進行方向情報を送信することが可能となる。このため、複数のユーザが同一方向への移動を行う際には、先頭を行くユーザによる操作を行うことなく進路案内装置10は親機としての動作を行い、他のユーザに対して進行方向の指示および確認を行うことができる。
【0101】
また、子機においては親機から自動的に送信される進行方向情報が表示されるため、親機としての進路案内装置10のユーザにおける誤操作に基づく進行方向情報を表示することがない。このため、確実に進行方向情報を確認することができる。
【0102】
次に、本発明における第4の実施例に係る進路案内装置10の動作について図20および図21に基づき説明する。図20は、本発明に関わる第4の実施例として、親機機としての動作処理を示したフローチャートであり、図21は子機としての動作処理を示したフローチャートである。第4の実施例における進路案内装置10の構成は第1の実施例と同一であり、第1の実施例から第3の実施例と共通する処理については同一符号を付すとともに説明を省略する。
【0103】
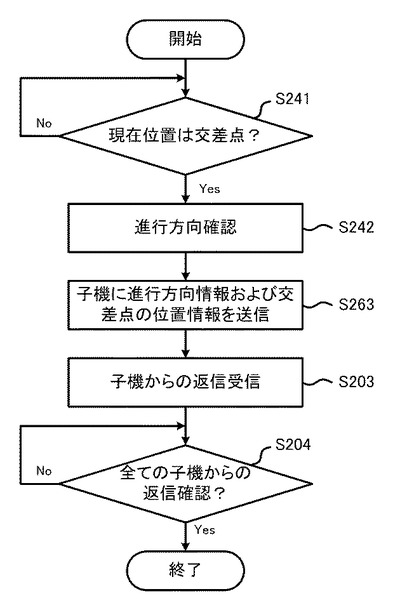
図20におけるステップS242において交差点における進行方向を確認した後、通信制御部202はステップS242の処理によって確認した進行方向に基づく進行方向情報に加えて位置情報取得部201において取得した交差点の位置情報を通信部108によって他の進路案内装置10に送信させる(ステップS263)。
【0104】
図21におけるステップS271において、通信制御部202は親機より交差点における進行方向情報に加えて交差点の位置情報を受信したか否かを判断する(ステップS271)。ステップS271の判断を行う親機からの進行方向情報の送信は図20のステップS263の処理に基づく。
【0105】
ステップS271において、親機より交差点における進行方向情報および交差点の位置情報を受信していないと判断された場合は(ステップS271:No)、ステップS271の判断を再度実行する。親機より交差点における進行方向情報および交差点の位置情報を受信したと判断された場合は(ステップS271:Yes)、位置情報取得部201は自装置における現在位置が交差点の位置情報に対して所定距離分進行方向に対して手前に達したか否かを判断する(ステップS272)。
【0106】
ステップS272の判断は、親機より送信された交差点を示す緯度経度情報に対して、子機としての進路案内装置10は自装置の現在位置情報を示す緯度経度情報が自装置の現在位置情報の推移によって得られる進行方向に対して、例えば10mから20m手前である場合などによる判断を行う。
【0107】
ステップS272において、交差点の位置情報に対して所定距離分手前に達していないと判断された場合は(ステップS272:No)、ステップS271の判断を再度実行する。達したと判断された場合は(ステップS272:Yes)、表示制御部206は表示部101に図14(B)に示すような方向確認画面317を表示させるとともに、方向確認画面317における指示表示部318に親機より受信した進行方向情報に基づく進行方向を表示させる(ステップS212)。
【0108】
上述したような動作によって、第3の実施例と同一の効果に加えて、子機としての進路案内装置10は、親機より進行方向が指示された交差点における所定距離分手前において進行方向の指示が表示される。
分としての進路案内装置10において交差点に置に到達したときに、進行方向の指示が表示される。このため、親機から指示される進行方向を適用する交差点等を他の交差点等と誤って認識することなく、的確に指示を受けることができる。
【0109】
次に、本発明における第5の実施例に係わる進路案内装置10について図22に基づき説明する。第5の実施例は、上述した他の実施例に対して子機であると判断された進路案内装置10において、受信した進行方向情報に対する処理のみ異なる。
【0110】
具体的には、親機より進行方向情報を受信した場合、親機の位置情報と親機の位置における地図データに基づき、図22(B)に示すように、方向確認画面317において親機の進行方向の方角を示す指示表示部318を表示する。
【0111】
例えば、親機において右折指示操作部312が操作され、子機において親機より進行方向情報および親機の進行方向情報、現在位置情報または交差点位置情報のいずれかを受信した場合、子機における制御部200は、これらの情報により親機が右折すると指示した方向における進路を地図情報より取得する。
【0112】
次に、上記取得した進路の方向を取得し、例えば、「東」や「南東」、「南南東」など一般的に用いられている方角を示す表示のうち、最も近い方角を選択し、方角を示す方向指示指針318bとともに表示指示部318に表示させる。
【0113】
表示指示部318における方向指示指針318bの表示無機は、表示部101の上方向を北として表示させることが好ましい。
【0114】
第5の実施例によって、登山やトレッキングを行うグループにおいては、方角を基本とした方向指示である方が、道の迷いを防止する指示となる場合もあり、適切である。
【0115】
第5の実施例においては、親機における方向指示画面310は、他の実施例と同一としたが、このような形態に限らず、方角を指示できる画面であってもよい。
【0116】
さらに、上記各実施例においては、画面表示のみによる方向指示を行うことについて説明したが、子機において、親機より進行方向情報等を受信した際、出力部としての振動装置1036やスピーカ1034により出力する音声により、ユーザに進行方向情報を受信したことを通知するようにしてもよい。また、方向指示を音声による方向指示を併用してもよい。この場合の音声は、記憶部104やROM2003に予め記録された音声を用いる。
【0117】
また、親機が送信する進行方向情報に、親機における撮像素子1024を用いた画像が添付されている場合、子機において方向確認画面317に方向指示部318と共に添付された画像を表示してもよい。この場合に添付される画像は、親機のユーザが方向指示を行う位置において任意に撮影してもよく、親機における方向指示画面310の操作が受け付けられると同時に自動的に撮影され、添付されてもよい。進路案内装置10を自転車に装着している場合は、表示部101を上方に向けて装着し、撮像素子1024および撮像素子1024に映像を集光させるレンズ等を、進路案内装置10の進行方向に向く面に配置させるとよい。
【0118】
また、親機が送信する進行方向情報に、親機が方向指示画面を操作した時間を示す時間情報や、親機が方向指示画面を操作した時点における親機と子機の距離を示す距離情報を含めてもよい。距離情報は、子機が複数存在する場合には、各々の子機との距離を示す距離情報を、各々の子機に送信することが好ましい。時間情報や距離情報を含む進行方向情報を受信した子機は、進行方向の指示の表示に加えて、時間情報や距離情報を表示させる。このような処理により、子機のユーザは、親機が方向指示画面を操作した位置をさらに正確に判断することができる。
【0119】
また、図9に示す動作モード決定部204による処理(ステップS114、ステップS115)において、親機と子機の位置関係が入れ替わった場合、例えば1分など所定の時間、その位置関係が維持された後に、親機モードと子機モードを切り換えてもよい。例えば、親機と子機が並走した場合や、短時間のみ親機と子機の位置関係が入れ替わった場合であっても、親機と子機の関係を維持することにより、ユーザの混乱を防止する。
【符号の説明】
【0120】
10:進路案内装置、101:表示部、105:操作部、106:タッチパネル操作部、107:GPS部、108:通信部、200:制御部、201:位置情報取得部、202:通信制御部、203:位置関係判断部、204:動作モード決定部、205:機能選択部、206:表示制御部、300:地図画面、310:方向指示画面、317:方向確認画面
【技術分野】
【0001】
本発明は、複数の装置間で通信を行うことによって適切な進路案内を行う進路案内装置、進路案内方法およびプログラムに関する。
【背景技術】
【0002】
携帯型のナビゲーション装置が普及しており、自動車における利用に加えて自転車や徒歩での利用機会も増加している。このようなナビゲーション装置は、単独での利用を前提としたものが多く、複数のナビゲーション装置間で通信を行う利用であっても、複数のナビゲーション装置間の位置情報を共有するものであることが多い(例えば特許文献1)。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2003−139546号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
このようなナビゲーション装置においては、複数のナビゲーション装置間において各々の位置情報は共有されているものの、進路案内は各々の装置において個別に行われている。このため、ナビゲーション装置間の進路情報の共有は、別途音声通信を用いるなど、迅速性や安全性に問題がある場合があった。
【0005】
本発明はこのような問題点に鑑みなされたものであり、装置間の通信を行いながら、各々の装置の位置関係において適切な進路案内を行う進路案内装置、進路案内方法およびプログラムを提供する。
【課題を解決するための手段】
【0006】
上記目的を達成するために、第1の発明に係る進路案内装置(10)は、自装置の現在位置情報を取得する位置情報取得部(201)、前記位置情報取得部(201)によって取得した自装置における現在位置情報を予め登録された他装置に送信し、前記予め登録された他装置における現在位置情報を受信する制御を行う通信制御部(202)、前記位置情報取得部(201)によって取得した自装置の現在位置情報および前記通信制御部(202)の制御によって取得した他装置における現在位置情報によって判別した自装置の進行方向に対する自装置と他装置との位置関係に基づいて、自装置が他装置より進行方向に対して先行しているか否かを判断する位置関係判断部(203)、前記位置関係判断部(203)において、自装置が他装置より進行方向に対して先行していると判断された場合は、自装置を親機として動作させ、自装置が他装置より進行方向に対して先行していないと判断された場合は、自装置を子機として動作させる動作モード決定部(204)、前記動作モード決定部(204)において、自装置が親機であると判断された場合は、進行方向を示す進行方向情報を前記通信制御部(202)により他装置へ送信させる機能を動作させ、自装置が子機であると判断された場合は、親機であると判断されている他装置より進行方向情報を前記通信制御部(202)によって受信させる機能を動作させる機能選択部(205)、を備えることを特徴とする。
【0007】
第2の発明に係る進路案内装置(10)は、第1の発明において、前記動作モード決定部(204)において自装置が子機であると判断された場合は、前記機能選択部(205)によって動作された機能によって他装置より受信した前記進行方向情報を表示させる制御を行う表示制御部(206)をさらに備えることを特徴とする。
【0008】
第3の発明に係る進路案内装置(10)は、第2の発明において、前記表示制御部(206)は、前記機能選択部(205)によって動作された機能によって他装置より受信した前記進行方向情報を、前記通信制御部(202)の制御によって取得した親機であると判断されている他装置において進行方向を送信した時点での現在位置情報に基づき表示させる制御を行うことを特徴とする。
【0009】
第4の発明に係る進路案内装置(10)は、第1から第3の発明におけるいずれか1の発明において、前記動作モード決定部(204)において自装置が子機であると判断された場合は、前記機能選択部(205)は、前記受信した進行方向情報に対して進行方向確認情報を前記通信制御部(202)によって送信させる機能を動作させることを特徴とする。
【0010】
第5の発明に係る進路案内方法は、自装置の現在位置情報を取得する現在位置情報取得ステップ、前記現在位置情報取得ステップにおいて取得した自装置の現在位置情報の送信と他装置の現在位置情報の取得を、予め登録された装置間で通信することにより相互に行う位置情報送受信ステップ、前記現在位置情報取得ステップにおいて取得した自装置の現在位置情報および前記位置情報送受信ステップにおいて取得した他装置における現在位置情報に基づき、自装置の進行方向に対する他装置との位置関係を判断する位置関係判断ステップ、前記位置関係判断ステップにおいて、自装置が他装置より進行方向に対して先行していると判断された場合は、自装置を親機として動作させ、自装置が他装置より進行方向に対して先行していないと判断された場合は、自装置を子機として動作させる動作モード決定ステップ、前記動作モード決定ステップにおいて、自装置が親機であると判断された場合は、進行方向を示す進行方向情報を前記通信制御部(202)により他装置へ送信させる機能を動作させ、自装置が子機であると判断された場合は、親機であると判断されている他装置より進行方向情報を前記通信制御部(202)により受信させる機能を動作させる機能選択ステップ、を備えることを特徴とする。
【0011】
第6の発明に係るプログラムは、進路案内装置(10)が備えるコンピュータを、自装置の現在位置情報を取得する現在位置情報取得ステップ、前記現在位置情報取得ステップにおいて取得した自装置の現在位置情報の送信と他装置の現在位置情報の取得を、予め登録された装置間で通信することにより相互に行う位置情報送受信ステップ、前記現在位置情報取得ステップにおいて取得した自装置の現在位置情報および前記位置情報送受信ステップにおいて取得した他装置における現在位置情報に基づき、自装置の進行方向に対する他装置との位置関係を判断する位置関係判断ステップ、前記位置関係判断ステップにおいて、自装置が他装置より進行方向に対して先行していると判断された場合は、自装置を親機として動作させ、自装置が他装置より進行方向に対して先行していないと判断された場合は、自装置を子機として動作させる動作モード決定ステップ、前記動作モード決定ステップにおいて、自装置が親機であると判断された場合は、進行方向を示す進行方向情報を前記通信制御部(202)により他装置へ送信させる機能を動作させ、自装置が子機であると判断された場合は、親機であると判断されている他装置より進行方向情報を前記通信制御部(202)により受信させる機能を動作させる機能選択ステップ、として動作させることを特徴とする。
【発明の効果】
【0012】
本発明によれば、複数の装置間で通信を行うことによって、各々の位置関係において適切な進路案内を行うことができる。
【図面の簡単な説明】
【0013】
【図1】本発明に係る進路案内装置の構成例を表すブロック図である。
【図2】本発明に係る進路案内装置の入力部の構成例を表すブロック図である。
【図3】本発明に係る進路案内装置の出力部の構成例を表すブロック図である。
【図4】本発明に係る進路案内装置のセンサ部の構成例を表すブロック図である。
【図5】本発明に係る進路案内装置の制御部の構成例を表すブロック図である。
【図6】本発明に係る進路案内装置の制御部による機能構成例を表すブロック図である。
【図7】本発明に係る進路案内装置の外観斜視図の例である。
【図8】本発明に係る進路案内装置の第1の実施例としての動作例を表すフローチャートである。
【図9】本発明に係る進路案内装置の第1の実施例としての動作例を表すフローチャートである。
【図10】本発明に係る進路案内装置の第1の実施例として、親機および子機における画面表示例である。
【図11】本発明に係る進路案内装置の第1の実施例として、親機および子機における画面表示例である。
【図12】本発明に係る進路案内装置の第1の実施例として親機における動作例を表すフローチャートである。
【図13】本発明に係る進路案内装置の第1の実施例として子機における動作例を表すフローチャートである。
【図14】本発明に係る進路案内装置の第1の実施例として親機および子機における画面表示例である。
【図15】本発明に係る進路案内装置の第1の実施例として親機および子機における画面表示例である。
【図16】本発明に係る進路案内装置の第2の実施例として親機における動作例を表すフローチャートである。
【図17】本発明に係る進路案内装置の第2の実施例として子機における動作例を表すフローチャートである。
【図18】本発明に係る進路案内装置の第3の実施例として親機における動作例を表すフローチャートである。
【図19】本発明に係る進路案内装置の第3の実施例として子機における動作例を表すフローチャートである。
【図20】本発明に係る進路案内装置の第4の実施例として親機における動作例を表すフローチャートである。
【図21】本発明に係る進路案内装置の第4の実施例として子機における動作例を表すフローチャートである。
【図22】本発明に係る進路案内装置の第5の実施例として親機および子機における画面表示例である。
【発明を実施するための形態】
【0014】
以下、本発明における進路案内装置10について、図1から図7を参照して説明する。
【0015】
進路案内装置10は、複数の進路案内装置10の間で通信可能なナビゲーション装置であり、単体では通常のナビゲーション装置として用いることができる。進路案内装置10は、携帯型や車載のナビゲーション装置であるが、携帯電話やスマートフォン、タブレット端末等の各種装置におけるアプリケーションとして動作するようにしてもよい。
【0016】
進路案内装置10は図1に示すように、表示部101、記憶部104、操作部105、GPS部107、通信部108を備え、必要に応じて入力部102、出力部103、センサ部109、制御部200等を備える。また、図示しないが各部を動作させるための電源を供給する電源部も備える。
【0017】
表示部101は、例えば液晶表示素子や有機EL(Electro Luminescence)表示素子等からなり、後述する表示制御部206の制御によって、表示内容や表示形態が制御される。また、表示部101には表示制御部206の制御によってタッチパネル操作部106への操作位置を示すための操作アイコン等が表示される。
【0018】
記憶部104は、表示部101に表示する地図データや表示内容のデータ、通信可能な他の進路案内装置10を識別する登録情報等を記憶し、制御部200の制御により記憶処理や読み出し処理が行われる。記憶部104は、例えばHDD(Hard Disk Drive)やフラッシュメモリより構成される。また、記憶部104は進路案内装置10に内蔵されるものに限らず、入力部102や出力部103として機能する所定のインターフェースや所定の接続端子に接続される外部の記憶デバイスであってもよい。外部の記憶デバイスの一例としては、USB(Universal Serial Bus)端子に接続されるUSBメモリや外部HDD装置、所定のメモリカードスロットにより接続されるメモリカードなどである。
【0019】
操作部105は、進路案内装置10に対してユーザが各種処理や動作を指示するためのユーザインターフェースである。操作部105は、例えば押ボタン式や回転式の操作手段を含み、表示部101に重ねて設けられたタッチパネル操作部106を含む。操作部105に入力された信号は、制御部200の処理により指示内容に基づき各部の操作や各種処理が実行される。
【0020】
GPS部107は、GPS(Global Positioning System)衛星からの電波を受信し、受信した信号を制御部200に送信する。GPS部107は、GPS衛星からの電波を受信する図示しないGPSアンテナを含む。また、GPS部107から取得した信号に基づいた演算を制御部200により行うことにより、進路案内装置10の現在位置を表す現在位置情報を得ることができる。
【0021】
通信部108は、他の進路案内装置10との相互の通信を行う通信モジュール等であり、一例としてはWi−Fi(Wireless Fidelity:登録商標)回線、携帯電話回線、特定省電力無線などを用いることができる。通信部108は、図示しないが利用する通信形態に適合したアンテナを備える。通信部108は、制御部200の制御により所定の情報を他の進路案内装置10との通信によって送受信する。
【0022】
図2は、入力部102の構成例を示したブロック図である。入力部102は、外部からのアナログ音声信号やデジタル音声データ、映像データの入力が可能な音声入力端子1021や、進路案内装置10に内蔵されるマイクロフォン1022や撮像素子1024等により構成される。入力部102から入力された各種データは制御部200によって、デコード処理や記憶部104への記憶処理等が行われる。さらに入力部102は、外部から入力されるアナログ信号をデジタルデータに変換するADC(Analog Digital Converter)1023を包含してもよい。
【0023】
図3は、出力部103の構成例を示したブロック図である。出力部103は、各種データを出力する出力装置や出力端子等である。出力部103は、制御部10から出力されるデジタルデータをアナログ信号に変換するDAC(Digital Analog Converter)1031、DAC1031により変換されたアナログ信号または制御部200から出力されるデジタルデータを増幅する音声増幅部1032を包含してもよい。また、出力部103は音声信号を出力するスピーカ1033やヘッドフォン端子等の音声出力端子1034、映像信号を出力する映像出力端子1035、さらにはユーザへの通知を振動として出力する振動装置1036であってもよい。
【0024】
入力部102および出力部103は、記憶部104を構成する可搬型記録媒体等の接続部であってもよく、例えば図示しないメモリカードを接続するメモリカードスロット、USBメモリ、外部HDDを接続するUSB端子などである。
【0025】
図4は、センサ部109の構成例を示したブロック図である。センサ部109は、進路案内装置10の各種状態を検出するセンサであり、例えば加速度センサ1091、温度・湿度センサ1092、照度センサ1093等から構成される。各種センサからの出力は制御部200によって演算され、各々のセンサからの出力値に応じた処理や制御が実行される。
【0026】
図5は、制御部200の構成例を示したブロック図である。制御部200は、例えば、CPU(Central Processing Unit)2001、RAM(Random Access Memory)2002、ROM(Read Only Memory)2003、DSP(Digital Signal Processor)2004等により構成され、ROM2003に記憶された各種プログラムをRAM2002上で実行することにより進路案内装置10の各部の制御や各部より入力された信号の処理、各種データやファイルの処理を行う。
【0027】
制御部200におけるDSP2004は、入力部102より入力される画像データや音声データを圧縮データに変換するエンコード処理、記憶部104記憶されている各種圧縮データをデコードするデコード処理に加えて、音質補正や画像調整等の各種処理を行う。
【0028】
制御部200は、前述したプログラムの実行により、各種機能を実現する。図6は、制御部200により実現される機能例をしめした機能ブロック図である。制御部200は、、位置情報取得部201、通信制御部202、位置関係判断部203、動作モード決定部204、機能選択部205、表示制御部206としての機能を実現する。
【0029】
位置情報取得部201は、GPS部107から送信された現在位置におけるGPS衛星からの信号を取得し、例えば緯度経度情報としての現在位置情報を演算によって取得する。位置情報取得部201は、現在位置情報の取得を例えば1秒毎や5秒毎など所定時間毎に実行し、取得された現在位置情報は記憶部104に記憶される。現在位置情報の取得間隔や取得タイミングは上述したものに限らず、進路案内装置10の動作状況によって取得間隔を変化させたり、制御部200によって動作する機能に取得タイミングを決定させてもよい。
【0030】
通信制御部202は、通信部108による各種情報の送受信動作を制御する。具体的には、位置情報取得部201により取得した自装置の現在位置情報を予め登録した他の進路案内装置10に送信させる。また、予め登録された他の進路案内装置10における現在位置情報を受信させる。さらには、ユーザによって指示された進行方向情報および進行方向確認情報を予め登録した他の進路案内装置10に送信させ、他の進路案内装置10によって送信された進行方向情報および進行方向確認情報を受信させる。
【0031】
通信制御部202は、上述した情報の送受信制御に加えて、自装置を含む複数の進路案内装置10間における登録処理を制御してもよい。例えばBlutooth(登録商標)通信やWi−Fi通信を用いた装置間相互の登録処理である。
【0032】
位置関係判断部203は、位置情報取得部201により取得した自装置の現在位置情報および通信制御部202による通信によって取得した他装置の現在位置情報に基づき、自装置と他の進路案内装置10の双方の進行方向における前後関係を判断する。具体的には、自装置における位置情報取得部201において取得した現在位置情報とその現在位置情報の所定時間における推移に基づく進行方向、さらに通信制御部202によって取得した予め登録された他の進路案内装置10の現在位置情報を対比演算することによって、進行方向に対する位置関係を求め、自装置が他装置より進行方向に対して先行しているか否かを判断する。位置関係判断部203は、位置情報取得部201による現在位置情報の取得および通信制御部202による他の進路案内装置10の現在位置情報の取得毎に位置関係を判断する。
【0033】
動作モード決定部204は、位置関係判断部203によって判断された結果に基づき、自装置が親機モードとして動作するか子機モードとして動作するかを決定する。具体的には、動作モード決定部204において、自装置が予め登録された全ての他装置より進行方向に対して先行していると判断された場合は、自装置を親機モードとして動作させ、そうでない場合には自装置を子機モードとして動作させる決定を行う。
【0034】
機能選択部205は、動作モード決定部204において決定した動作モードに基づき、進路案内装置10に所定の機能を動作させる。具体的には、進路案内装置10が親機である場合には、親機としての動作の一例として、子機としての進路案内装置10に対して方向指示情報の送信を可能とさせる。また、進路案内装置10が子機である場合には、子機としての動作の一例として、親機としての進路案内装置10から送信された方向指示情報の受信を可能とさせる。
【0035】
表示制御部206は、進路案内装置10が備える表示部101や進路案内装置10に接続される表示部101に対して、各種情報を表示させる制御を行う。具体的には、現在位置情報に基づく地図画面300や地図画面300上の自装置や他装置の位置や進行方向を示す各種アイコン、親機として判断された進路案内装置10における方向指示画面310、子機として判断された進路案内装置10における方向確認画面317、これらに加えて各種処理状況や動作を示すアイコンや図形、文字、タッチパネル操作部106の操作位置に対応した各種操作アイコン等を表示させる。
【0036】
次に、図7に示す進路案内装置10外観斜視図について説明する。図7は進路案内装置10の一例として、ポータブル型の装置に適用したときの外観斜視図である。図7の例で示す進路案内装置10は、例えば矩形の筐体を有し、その筐体の1面に表示部101およびタッチパネル操作部106を備え、さらに操作部105を備える。
【0037】
進路案内装置10は、矩形に限らずどのような形態であってもよいが、表示部101が備えられている面は平面であることが好ましい。また、操作部105は進路案内装置10のいずれの面に備えられていてもよい。
【0038】
進路案内装置10は、ユーザが持ち歩く場合や自転車等に装着して使用する場合、防水性能を備えていることが好ましい。また、図示しないが表示部101の反対の面に自転車等に装着するための装着機構が備えられていてもよい。
【0039】
次に、本発明における第1の実施例に係る進路案内装置10の動作について図8から図15に基づき説明する。本発明に関わる各実施例は、いずれも複数の進路案内装置10が予め相互に登録されていることを前提とする。複数の進路案内装置10は、ほぼ同時に同一方向へ向かう複数のユーザにより各々所持されるものであり、例えば複数のユーザにより構成される登山やトレッキングを行うグループ、サイクリングやツーリングを行うグループ等である。
【0040】
また、本発明に関わる各実施例は、いずれも複数の進路案内装置10が通信部108により相互に通信可能であることを前提とする。通信部108による相互の通信方式は、前述したようにWi−Fiや携帯電話回線、特定省電力無線等その方式は問わない。
【0041】
図8は、本発明に関わる第1の実施例において、自装置の現在位置情報を取得し、予め登録された進路案内装置10との間で各々の現在位置情報を共有する動作を表すフローチャートである。
【0042】
図8において、先ず進路案内装置10の位置情報取得部201は、自装置の現在位置情報を取得する(ステップS100)。現在位置情報は、例えば緯度経度による情報であり、GPS部107において受信し出力されるGPS衛星からの受信情報を演算することにより取得する。位置情報取得部201は、自装置の現在位置情報を所定時間間隔で逐次取得する。
【0043】
ステップS100において現在位置情報を取得した後、通信制御部202は通信部108を制御して予め登録された他の進路案内装置10にステップS100で取得した現在位置情報を送信する(ステップS101)。
【0044】
ステップS101の処理後、通信制御部202は通信部108を制御して予め登録された他の進路案内装置10より各々の現在位置情報を取得する(ステップS102)。ステップS102において他装置の現在位置情報を受信した場合、通信制御部202は予め登録された全ての他の進路案内装置10における現在位置情報を取得したか否かを判断する(ステップS103)。
【0045】
ステップS103において、全ての他の進路案内装置10における現在位置情報を取得していないと判断された場合は(ステップS103:No)、再度ステップS103の処理を実行する。ステップS103において、全ての他の進路案内装置10における現在位置情報を取得したと判断された場合は(ステップS103:Yes)、本処理を終了する。
【0046】
図8において、ステップS100からステップS101の処理、およびステップS102からステップS103の処理は前後してもよく、予め登録された複数の進路案内装置10において相互に各々の最新の現在位置情報を共有できればよい。
【0047】
図8におけるステップS100の処理は、本発明の進路案内装置10によって実現される進路案内方法および進路案内装置10が備えるコンピュータによって実行される、現在位置情報取得ステップに該当する。
【0048】
図8におけるステップS101からステップS103までの処理は、本発明の進路案内装置10によって実現される進路案内方法および進路案内装置10が備えるコンピュータによって実行される、位置情報送受信ステップに該当する。
【0049】
図9は、図8により説明した進路案内装置10の動作によって取得した自装置の位置情報および他装置の位置情報に基づく相互の位置関係の判断により動作モードを決定する動作を表すフローチャートである。
【0050】
図9において、位置関係判断部203は、ステップS100において取得した自装置の現在位置情報および通信制御部202による通信によって取得した他装置の現在位置情報を対比し、自装置と他の進路案内装置10の進行方向における前後関係を判断する(ステップS110)。ステップS110において、位置関係判断部203は、自装置の現在位置情報の座標および自装置の所定時間における現在位置の推移によって進行方向を演算し、自装置の現在位置情報に対して他装置の現在位置情報が進行方向に存在するか、進行方向の逆方向に存在するかを演算により求める。
【0051】
ステップS110において、自装置の現在位置情報と他装置の現在位置情報との進行方向に対する位置関係を判断した後、位置関係判断部203は他の進路案内装置10における現在位置情報毎に、自装置の現在位置が進行方向に対して他装置の現在位置より先行しているか否かを判断する(ステップS112)。ステップS112において、位置関係判断部203は自装置の現在位置情報を表す座標情報が、他装置の現在位置情報を表す座標情報に対して、進行方向に存在するか否かを演算により求め、進行方向に存在する場合は先行していると判断し、進行方向に存在しないときは先行していないと判断する。
【0052】
ステップS112において、自装置が他の進路案内装置10より先行していないと判断された場合は(ステップS112:No)、予め登録された他の進路案内装置10におけるいずれかの進路案内装置10に自装置が先行していないため、ステップS115において動作モード決定部204は自装置を子機モードとして動作させ、本処理を終了する。
【0053】
ステップS112において、自装置が他の進路案内装置10より先行していると判断された場合は(ステップS112:Yes)、位置関係判断部203は予め登録されている全ての他の進路案内装置10における現在位置情報との対比が完了したか否かを判断する(ステップS113)。
【0054】
ステップS113において、全ての他の進路案内装置10との現在位置情報の対比が完了していないと判断された場合は(ステップS113:No)、ステップS110に戻り、現在位置情報の対比がまだ行われていない他の進路案内装置10における現在位置情報との対比を行う。ステップS113において、全ての他の進路案内装置10との現在位置情報の対比が完了したと判断された場合は(ステップS113:Yes)、自装置は予め登録された全ての他の進路案内装置10に対して進行方向に先行しているため、ステップS114において動作モード決定部204は自装置を親機モードとして動作させ、本処理を終了する。
【0055】
図9におけるステップS110からステップS113の処理は、本発明の進路案内装置10によって実現される進路案内方法および進路案内装置10が備えるコンピュータによって実行される、位置関係判断ステップに該当する。
【0056】
図9におけるステップS114およびステップS115の処理は、本発明の進路案内装置10によって実現される進路案内方法および進路案内装置10が備えるコンピュータによって実行される、動作モード決定ステップに該当する。
【0057】
図9に示す処理は、各々の進路案内装置10における最新または最新に近い現在位置情報に基づき逐次実行される。このため、子機であった進路案内装置10が親機であった進路案内装置10を進行方向に対して追い越すことで親機として動作し、親機であった進路案内装置10が子機であった進路案内装置10に進行方向に対して追い越されることで子機として動作する。
【0058】
次に、図9の処理によって判断された親機または子機としての動作例としての表示画面例を図10および図11用いて説明する。図10は表示部101に地図画面300が表示され、地図画面300上に自装置の現在位置が自位置アイコン302として表示されている状態を示す。また、図10(A)は進路案内装置10が親機である場合の表示例であり、図10(B)は進路案内装置10が子機である場合の表示例である。
【0059】
図10における自位置アイコン302は地図画面300のほぼ中央部に進行方向を表示部101の上部を向けた状態で表示される。進路案内装置10の移動に伴い、地図画面300は常に最新の現在位置を中心とし進行方向を上部としながら、移動および回転表示される。また、地図画面300には交差点301が表示されている。
【0060】
表示部101には、地図画面300に加えてモード表示部320、位置確認操作部330、方向通知操作部340が表示される。方向通知操作部340は子機には表示されない。位置確認操作部330および方向通知操作部340は、タッチパネル操作部106による操作可能な操作アイコンである。位置確認操作部330および方向通知操作部340は、タッチパネル操作部106による操作に限らず、進路案内装置10の筐体上に備えられた操作部105や、図示しないリモコン装置によるものであってもよい。
【0061】
モード表示部320は、自装置が親機である場合は親機モードで動作していることを表示し、自装置が子機である場合は子機モードで動作していることを表示する。 位置確認操作部330は、操作されることによって図11に示すように地図画面300上に他の進路案内装置10の現在位置を表示させる。方向通知操作部340は、操作されることによって図14(A)に例示するような方向指示画面310を表示させ、方向指示を可能とさせる。
【0062】
図10の状態で、位置確認操作部330がユーザによって操作されると、図11に示すように、通信制御部202によって取得された他の進路案内装置10の現在位置情報に基づいて、表示制御部206は地図画面300上に他の進路案内装置10の現在位置を他装置位置アイコン303として表示させる。図11における位置確認操作部330の形状は、位置確認操作部330がユーザにより操作され、位置確認を行っていることを示している状態の例を表している。
【0063】
図11(A)は、自装置が親機であるため、自位置アイコン302の進行方向後方に子機である他装置位置アイコン303が表示されている。図11(B)は、自装置が子機であるため、自位置アイコン302の進行方向前方に親機である他装置位置アイコン303が表示され、自位置アイコン302の進行方向後方に他の子機である他装置位置アイコン303が表示されている。
【0064】
図10または図11に示す状態において方向通知操作部330が操作されたときの処理を図12および図13に示す。また、図12および図13の動作時における表示例を図14および図15に示す。
【0065】
図12および図13における各処理は、本発明の進路案内装置10によって実現される進路案内方法および進路案内装置10が備えるコンピュータによって実行される機能選択ステップとして選択された機能に該当する。
【0066】
図12の処理は、親機であると判断された進路案内装置10においてユーザが方向通知操作部340を操作したことが前提となる。方向通知操作部340が操作されると、親機においては図14(A)に例示する方向指示画面310が表示される。
【0067】
図14(A)における方向通知操作部340の形状は、方向通知操作部340がユーザにより操作され、方向通知が可能であることを示している状態の例を表している。方向通知操作部340の操作によって親機における表示部101に表示される方向指示画面310においては、指示対象となる方向に対応して、左折指示操作部311、右折指示操作部312、直進指示操作部313、停止指示操作部314、減速指示操作部315が表示され、さらに子機情報表示部316が表示される。左折指示操作部311、右折指示操作部312、直進指示操作部313、停止指示操作部314、減速指示操作部315は、タッチパネル操作部106により操作可能な操作アイコンである。
【0068】
図14(A)において、左折指示操作部11は操作することによって子機に左折を行うことを通知させる。右折指示操作部312は操作することによって子機に右折を行うことを通知させる。直進指示操作部313は操作することによって子機に直進することを通知させる。停止指示操作部314は操作することによって子機に停止することを通知させる。減速指示操作部315は操作することによって子機に減速することを通知させる。子機情報表示部316は、登録されている子機の数に応じた数の子機情報表示部316が表示されており、方向指示操作に応じて子機より受信した確認信号の有無を判別表示させる。
【0069】
図12において、先ず制御部200は進行方向を指示する操作が行われたか否かを判断する(ステップS201)。進行方向を指示する操作とは、図14(A)の表示画面において左折指示操作部311、右折指示操作部312、直進指示操作部313、停止指示操作部314、減速指示操作部315のいずれかに対するタッチパネル操作部106への操作である。
【0070】
図14(A)の例においては、ステップS201の操作として右折指示操作部312が操作された状態を示している。ユーザによるこのような指示は、親機としての進路案内装置10のユーザが、例えば進行方向に交差点があることを目視または地図画面300の表示等により確認し、その交差点に対しての進行方向を子機としての進路案内装置10のユーザに通知する際に行う。また、交差点に限らず必要に応じて停止指示操作部314による停止指示や減速指示操作部315による減速指示等も行うことができる。
【0071】
ステップS201において進行方向を指示する操作が行われていないと判断された場合は(ステップS201:No)、ステップS201の判断を再度実行する。ステップS201において進行方向を指示する操作が行われたと判断された場合は(ステップS201:Yes)、通信制御部202はステップS201の処理で行われた進行方向を指示する操作による進行方向情報を通信部108によって他の進路案内装置10に送信させる(ステップS202)。
【0072】
ステップS202において進行方向情報が送信される他の進路案内装置10は、予め登録された進路案内装置10において子機であると判断された進路案内装置10である。ステップS202において子機に対して進行方向情報が送信されることによって、子機である進路案内装置10より進行方向情報を確認したことに基づく返信が受理される(ステップS203)。
【0073】
ステップS203において、通知した進行方向情報に対して子機としての進路案内装置10より返信を受信した場合は、図15(A)に示すように子機情報表示部316における返信を受信した子機に対応するアイコンの状態を変化させる。これにより、後続する子機である進路案内装置10のユーザが進行方向を確認したことを把握することができる。
【0074】
子機情報表示部316は、相互に登録されている進路案内装置10のうち子機として判断されている進路案内装置10が3台ある場合には子機情報表示部316が3個表示される。子機情報表示部316には数字が表示されているが、子機からの返信を受信した順に1から割り振ってもよく、相互の登録時に予め個々の進路案内装置10に番号を付与し、付与した番号に基づく表示であってもよい。その場合、1の番号を付与された進路案内装置10が親機として判断されている場合は、1以外の番号を付した子機情報表示部316が表示される。
【0075】
ステップS203において子機としての進路案内装置10からの返信を受信している間、通信制御部202は予め登録された進路案内装置10における子機としての進路案内装置10の全てからの返信があったか否かを判断する(ステップS204)。
【0076】
ステップS204において、全ての子機からの返信が確認できていない場合は(ステップS204:NO)、ステップS204の処理を再度実行する。しかし子機からの返信は子機のユーザによって実行されるため、必ずしも確実に実行されるとは限らない。このため、ステップS201における方向指示操作を行った時点より所定時間経過した場合や所定距離移動した場合はステップS204の処理を停止してもよい。または、ステップS201において行った方向指示操作が右左折や直進の指示であった場合は、位置情報取得部201によって取得している自装置の現在位置情報に基づき、方向操作指示がなされた位置から進行方向に存在する交差点を通過したと判断された場合にステップS204の処理を停止させてもよい。
【0077】
ステップS204において、全ての子機からの返信が確認できた場合(ステップS204:Yes)または上述したステップS204の処理が停止された場合は、本処理を終了する。
【0078】
図13の処理は、子機であると判断された進路案内装置10における例えば図10(B)または図11(B)の状態において、通信制御部202が親機より進行方向情報を受信することによって開始される。図13において、通信制御部202は親機より進行方向情報を受信したか否かを判断する(ステップS211)。ステップS211の判断を行う親機からの進行方向情報の送信は図12のステップS202の処理に基づく。
【0079】
ステップS211において、親機より進行方向情報を受信していないと判断された場合は(ステップS211:No)、ステップS211の判断を再度実行する。親機より進行方向情報を受信したと判断された場合は(ステップS211:Yes)、表示制御部206は表示部101に図10(b)に示すような方向確認画面317を表示させるとともに、方向確認画面317における指示表示部318に親機より受信した進行方向情報に基づく進行方向を示す方向指示矢印317aを表示させる(ステップS212)。
【0080】
図14(B)に例示する方向確認画面317は、親機から送信された進行方向情報を表示する指示表示部318および指示表示部318に表示された進行方向情報を確認したことを親機に送信するための指示操作確認部319により構成される。
【0081】
ステップS212において進行方向情報が表示されると、制御部200は指示操作確認部319が操作されたか否かを判断する(ステップS213)。ステップS213において、指示操作確認部319が操作されていないと判断され場合は(ステップS213:No)、ステップS213の処理を再度実行する。ステップS213において、指示操作確認部319が操作されたと判断された場合は(ステップS213:Yes)、通信制御部202は指示操作確認部319が操作されたことによる確認信号を通信部108によって送信させ(ステップS214)、本処理を終了する。ステップS214によって送信した確認信号は親機におけるステップS203の処理によって確認される。
【0082】
図15(B)における指示操作確認部319の形状は、指示操作確認部319がユーザにより操作された状態の例を表している。この処理によって親機における子機情報表示部316は図15(A)に示すように子機からの返信があったことを示すように表示される。
【0083】
ステップS213の処理は、ユーザによる指示操作確認部319の操作に基づくため、必ずしも確実に実行されるとは限らない。このためステップS212における進行方向情報が表示された時点より所定時間経過した場合や所定距離移動した場合はステップS213の処理を停止させステップS214の処理を行わずに本処理を終了してもよい。
【0084】
本実施例の親機およぶ子機における処理の流れを図7に示す親機と子機の位置関係を用いて説明する。親機としての進路案内装置10に図11(A)に示す地図画面300が表示されており、親機に続いて移動している子機としての進路案内装置10に図11(B)に示す地図画面300が表示されている。ここで親機のユーザが前方に交差点301が存在し右折を要すると判断した場合に、方向通知操作部340をタッチ操作して図14(A)に示す方向指示画面130を表示させる。方向表示画面310を表示させた親機のユーザは、図11(A)に示す交差点301に到達する前の位置において、右折指示操作部312をタッチ操作すると、子機においては図11(B)に示す位置において図15(B)に示す方向確認画面317が表示される。
【0085】
次に、図15(B)に示すように、方向確認画面317の表示を確認した子機のユーザが指示確認操作部319のタッチ操作を行うと、親機においては図15(A)に示すように子機情報表示部317の表示が変更され、親機のユーザは番号1に対応つけられている子機のユーザが右折指示を確認したことが判断できる。
【0086】
上述したような動作によって、予め相互に登録された複数の進路案内装置10において、進行方向における位置関係によって自動的に親機と子機として動作するとともに、親機として判断された進路案内装置10は、子機として判断された進路案内装置10に対して進行方向情報を送信することが可能となる。このため、複数のユーザが同一方向への移動を行う際には、先頭を行くユーザが使用する進路案内装置10が煩雑な操作を行うことなく親機としての動作を行い、他のユーザに対して進行方向の指示および確認を行うことができる。
【0087】
また、子機においては親機における進行方向の指示に基づき何の操作を行うこともなく進行方向情報が表示されるため、安全且つ確実に進行方向の確認を行うことができる。さらに、進行方向の指示操作および確認操作をタッチパネル操作部106により行う場合は、例えば自転車による移動中であっても安全に上述した操作を行うことができる。
【0088】
次に、本発明における第2の実施例に係る進路案内装置10の動作について図16および図17に基づき説明する。図16は、本発明に関わる第2の実施例として、親機機としての動作処理を示したフローチャートであり、図17は子機としての動作処理を示したフローチャートである。第2の実施例における進路案内装置10の構成は第1の実施例と同一であり、共通する処理については同一符号を付すとともに説明を省略する。
【0089】
図16におけるステップS201において進行方向を指示する操作が行われたと判断された場合は(ステップS201:Yes)、通信制御部202はステップS201の処理で行われた進行方向を指示する操作による進行方向情報に加えて位置情報取得部201において取得した現在位置情報を通信部108によって他の進路案内装置10に送信させる(ステップS222)。ここで送信される現在位置情報は進行方向指示操作が行われた時点における現在位置情報であり、位置情報取得部201は、進行方向指示操作があったことを検出したことによりその時点での現在位置情報を取得してもよく、所定時間間隔で取得している現在位置情報に基づき進行方向指示操作の時点に直近の現在位置情報であってもよい。
【0090】
図17の処理の開始は、図12における第1の実施例と同様であるが、図17におけるステップS231において通信制御部202は親機より進行方向情報に加えて進行方向指示操作時点での親機における現在位置情報を受信したか否かを判断する(ステップS231)。ステップS231の判断を行う親機からの進行方向情報の送信は図16のステップS222の処理に基づく。
【0091】
ステップS221において、親機より進行方向情報および現在位置情報を受信していないと判断された場合は(ステップS231:No)、ステップS231の判断を再度実行する。親機より進行方向情報および現在位置情報を受信したと判断された場合は(ステップS231:Yes)、位置情報取得部201は自装置における現在位置が親機において進行方向指示操作が実行された位置に到達したか否かを判断する(ステップS232)。
【0092】
ステップS232の判断は、親機における進行方向指示操作が実行された位置情報に完全に一致する必要はなく、親機の位置情報に対して半径1mから5m程度の範囲内に入った場合に到達したと判断する。
【0093】
上述したような動作によって、第1の実施例と同一の効果に加えて、子機としての進路案内装置10は、親機としての進路案内装置10において進行方向の指示を行った地点またはその地点に近い位置に到達したときに、進行方向の指示が表示される。このため、親機から指示される進行方向を適用する交差点等を他の交差点等と誤って認識することなく、的確に指示を受けることができる。
【0094】
次に、本発明における第3の実施例に係る進路案内装置10の動作について図18および図19に基づき説明する。図18は、本発明に関わる第3の実施例として、親機機としての動作処理を示したフローチャートであり、図19は子機としての動作処理を示したフローチャートである。第3の実施例における進路案内装置10の構成は第1の実施例と同一であり、第1の実施例および第2の実施例と共通する処理については同一符号を付すとともに説明を省略する。
【0095】
図18において、先ず制御部100は位置情報取得部201が取得した現在位置情報と地図データとに基づき、現在位置が交差点であるか否かを判断する(ステップS241。この判断は地図データにおける交差点としての位置情報を示す緯度経度データと完全に合致していなくとも、そのデータを中心に半径1mから10m程度の範囲内である場合に交差点であると判断する。この範囲は交差点を構成する道路の幅や道路の種別によって変更してもよい。
【0096】
ステップS241において、現在位置が交差点ではないと判断された場合は(ステップS241:No)、ステップS241の処理を再度実行する。ステップS241において、現在位置が交差点であると判断された場合は(ステップS241:Yes)、位置情報取得部201は交差点として判断された位置情報に対する前後の位置情報の推移によって交差点における進行方向を確認する(ステップS242)。
【0097】
ステップS242において交差点における進行方向を確認した後、通信制御部202はステップS242の処理によって確認した進行方向に基づく進行方向情報を通信部108によって子機としての他の進路案内装置10に送信させる(ステップS243)。
【0098】
図19において、通信制御部202は親機より交差点における進行方向情報を受信したか否かを判断する(ステップS251)。
【0099】
本実施例の親機およぶ子機における処理の流れを図11に示す親機と子機の位置関係を用いて説明する。方向表示画面310を表示させた親機のユーザは、図11(A)に示す交差点301に到達する前の位置において、右折指示操作部312をタッチ操作すると、子機においては図11(B)に示す位置ではなく図11(B)における自装置アイコン302の位置より進行方向に表示されている親機が方向指示操作を行った他装置位置アイコン303の位置に到達した時点において図14(B)に示す方向確認画面317が表示される。
【0100】
上述したような動作によって、予め相互に登録された複数の進路案内装置10において、進行方向における位置関係によって自動的に親機と子機として動作するとともに、親機として判断された進路案内装置10は、子機として判断された進路案内装置10に対して自動的に進行方向情報を送信することが可能となる。このため、複数のユーザが同一方向への移動を行う際には、先頭を行くユーザによる操作を行うことなく進路案内装置10は親機としての動作を行い、他のユーザに対して進行方向の指示および確認を行うことができる。
【0101】
また、子機においては親機から自動的に送信される進行方向情報が表示されるため、親機としての進路案内装置10のユーザにおける誤操作に基づく進行方向情報を表示することがない。このため、確実に進行方向情報を確認することができる。
【0102】
次に、本発明における第4の実施例に係る進路案内装置10の動作について図20および図21に基づき説明する。図20は、本発明に関わる第4の実施例として、親機機としての動作処理を示したフローチャートであり、図21は子機としての動作処理を示したフローチャートである。第4の実施例における進路案内装置10の構成は第1の実施例と同一であり、第1の実施例から第3の実施例と共通する処理については同一符号を付すとともに説明を省略する。
【0103】
図20におけるステップS242において交差点における進行方向を確認した後、通信制御部202はステップS242の処理によって確認した進行方向に基づく進行方向情報に加えて位置情報取得部201において取得した交差点の位置情報を通信部108によって他の進路案内装置10に送信させる(ステップS263)。
【0104】
図21におけるステップS271において、通信制御部202は親機より交差点における進行方向情報に加えて交差点の位置情報を受信したか否かを判断する(ステップS271)。ステップS271の判断を行う親機からの進行方向情報の送信は図20のステップS263の処理に基づく。
【0105】
ステップS271において、親機より交差点における進行方向情報および交差点の位置情報を受信していないと判断された場合は(ステップS271:No)、ステップS271の判断を再度実行する。親機より交差点における進行方向情報および交差点の位置情報を受信したと判断された場合は(ステップS271:Yes)、位置情報取得部201は自装置における現在位置が交差点の位置情報に対して所定距離分進行方向に対して手前に達したか否かを判断する(ステップS272)。
【0106】
ステップS272の判断は、親機より送信された交差点を示す緯度経度情報に対して、子機としての進路案内装置10は自装置の現在位置情報を示す緯度経度情報が自装置の現在位置情報の推移によって得られる進行方向に対して、例えば10mから20m手前である場合などによる判断を行う。
【0107】
ステップS272において、交差点の位置情報に対して所定距離分手前に達していないと判断された場合は(ステップS272:No)、ステップS271の判断を再度実行する。達したと判断された場合は(ステップS272:Yes)、表示制御部206は表示部101に図14(B)に示すような方向確認画面317を表示させるとともに、方向確認画面317における指示表示部318に親機より受信した進行方向情報に基づく進行方向を表示させる(ステップS212)。
【0108】
上述したような動作によって、第3の実施例と同一の効果に加えて、子機としての進路案内装置10は、親機より進行方向が指示された交差点における所定距離分手前において進行方向の指示が表示される。
分としての進路案内装置10において交差点に置に到達したときに、進行方向の指示が表示される。このため、親機から指示される進行方向を適用する交差点等を他の交差点等と誤って認識することなく、的確に指示を受けることができる。
【0109】
次に、本発明における第5の実施例に係わる進路案内装置10について図22に基づき説明する。第5の実施例は、上述した他の実施例に対して子機であると判断された進路案内装置10において、受信した進行方向情報に対する処理のみ異なる。
【0110】
具体的には、親機より進行方向情報を受信した場合、親機の位置情報と親機の位置における地図データに基づき、図22(B)に示すように、方向確認画面317において親機の進行方向の方角を示す指示表示部318を表示する。
【0111】
例えば、親機において右折指示操作部312が操作され、子機において親機より進行方向情報および親機の進行方向情報、現在位置情報または交差点位置情報のいずれかを受信した場合、子機における制御部200は、これらの情報により親機が右折すると指示した方向における進路を地図情報より取得する。
【0112】
次に、上記取得した進路の方向を取得し、例えば、「東」や「南東」、「南南東」など一般的に用いられている方角を示す表示のうち、最も近い方角を選択し、方角を示す方向指示指針318bとともに表示指示部318に表示させる。
【0113】
表示指示部318における方向指示指針318bの表示無機は、表示部101の上方向を北として表示させることが好ましい。
【0114】
第5の実施例によって、登山やトレッキングを行うグループにおいては、方角を基本とした方向指示である方が、道の迷いを防止する指示となる場合もあり、適切である。
【0115】
第5の実施例においては、親機における方向指示画面310は、他の実施例と同一としたが、このような形態に限らず、方角を指示できる画面であってもよい。
【0116】
さらに、上記各実施例においては、画面表示のみによる方向指示を行うことについて説明したが、子機において、親機より進行方向情報等を受信した際、出力部としての振動装置1036やスピーカ1034により出力する音声により、ユーザに進行方向情報を受信したことを通知するようにしてもよい。また、方向指示を音声による方向指示を併用してもよい。この場合の音声は、記憶部104やROM2003に予め記録された音声を用いる。
【0117】
また、親機が送信する進行方向情報に、親機における撮像素子1024を用いた画像が添付されている場合、子機において方向確認画面317に方向指示部318と共に添付された画像を表示してもよい。この場合に添付される画像は、親機のユーザが方向指示を行う位置において任意に撮影してもよく、親機における方向指示画面310の操作が受け付けられると同時に自動的に撮影され、添付されてもよい。進路案内装置10を自転車に装着している場合は、表示部101を上方に向けて装着し、撮像素子1024および撮像素子1024に映像を集光させるレンズ等を、進路案内装置10の進行方向に向く面に配置させるとよい。
【0118】
また、親機が送信する進行方向情報に、親機が方向指示画面を操作した時間を示す時間情報や、親機が方向指示画面を操作した時点における親機と子機の距離を示す距離情報を含めてもよい。距離情報は、子機が複数存在する場合には、各々の子機との距離を示す距離情報を、各々の子機に送信することが好ましい。時間情報や距離情報を含む進行方向情報を受信した子機は、進行方向の指示の表示に加えて、時間情報や距離情報を表示させる。このような処理により、子機のユーザは、親機が方向指示画面を操作した位置をさらに正確に判断することができる。
【0119】
また、図9に示す動作モード決定部204による処理(ステップS114、ステップS115)において、親機と子機の位置関係が入れ替わった場合、例えば1分など所定の時間、その位置関係が維持された後に、親機モードと子機モードを切り換えてもよい。例えば、親機と子機が並走した場合や、短時間のみ親機と子機の位置関係が入れ替わった場合であっても、親機と子機の関係を維持することにより、ユーザの混乱を防止する。
【符号の説明】
【0120】
10:進路案内装置、101:表示部、105:操作部、106:タッチパネル操作部、107:GPS部、108:通信部、200:制御部、201:位置情報取得部、202:通信制御部、203:位置関係判断部、204:動作モード決定部、205:機能選択部、206:表示制御部、300:地図画面、310:方向指示画面、317:方向確認画面
【特許請求の範囲】
【請求項1】
自装置の現在位置情報を取得する位置情報取得部、
前記位置情報取得部によって取得した自装置における現在位置情報を予め登録された他装置に送信し、前記予め登録された他装置における現在位置情報を受信する制御を行う通信制御部、
前記位置情報取得部によって取得した自装置の現在位置情報および前記通信制御部の制御によって取得した他装置における現在位置情報によって判別した自装置の進行方向に対する自装置と他装置との位置関係に基づいて、自装置が他装置より進行方向に対して先行しているか否かを判断する位置関係判断部、
前記位置関係判断部において、自装置が他装置より進行方向に対して先行していると判断された場合は、自装置を親機として動作させ、自装置が他装置より進行方向に対して先行していないと判断された場合は、自装置を子機として動作させる動作モード決定部、
前記動作モード決定部において、自装置が親機であると判断された場合は、進行方向を示す進行方向情報を前記通信制御部により他装置へ送信させる機能を動作させ、自装置が子機であると判断された場合は、親機であると判断されている他装置より進行方向情報を前記通信制御部によって受信させる機能を動作させる機能選択部、
を備えることを特徴とする、進路案内装置。
【請求項2】
前記動作モード決定部において自装置が子機であると判断された場合は、前記機能選択部によって動作された機能によって他装置より受信した前記進行方向情報を表示させる制御を行う表示制御部をさらに備えることを特徴とする、
請求項1に記載の進路案内装置。
【請求項3】
前記表示制御部は、前記機能選択部によって動作された機能によって他装置より受信した前記進行方向情報を、前記通信制御部の制御によって取得した親機であると判断されている他装置において進行方向を送信した時点での現在位置情報に基づき表示させる制御を行うことを特徴とする、
請求項2に記載の進路案内装置。
【請求項4】
前記動作モード決定部において自装置が子機であると判断された場合は、前記機能選択部は、前記受信した進行方向情報に対して進行方向確認情報を前記通信制御部によって送信させる機能を動作させることを特徴とする、
請求項1から3のいずれか1項に記載の進路案内装置。
【請求項5】
自装置の現在位置情報を取得する現在位置情報取得ステップ、
前記現在位置情報取得ステップにおいて取得した自装置の現在位置情報の送信と他装置の現在位置情報の取得を、予め登録された装置間で通信することにより相互に行う位置情報送受信ステップ、
前記現在位置情報取得ステップにおいて取得した自装置の現在位置情報および前記位置情報送受信ステップにおいて取得した他装置における現在位置情報に基づき、自装置の進行方向に対する他装置との位置関係を判断する位置関係判断ステップ、
前記位置関係判断ステップにおいて、自装置が他装置より進行方向に対して先行していると判断された場合は、自装置を親機として動作させ、自装置が他装置より進行方向に対して先行していないと判断された場合は、自装置を子機として動作させる動作モード決定ステップ、
前記動作モード決定ステップにおいて、自装置が親機であると判断された場合は、進行方向を示す進行方向情報を前記通信制御部により他装置へ送信させる機能を動作させ、自装置が子機であると判断された場合は、親機であると判断されている他装置より進行方向情報を前記通信制御部により受信させる機能を動作させる機能選択ステップ、
を備えることを特徴とする、進路案内方法。
【請求項6】
進路案内装置が備えるコンピュータを、
自装置の現在位置情報を取得する現在位置情報取得ステップ、
前記現在位置情報取得ステップにおいて取得した自装置の現在位置情報の送信と他装置の現在位置情報の取得を、予め登録された装置間で通信することにより相互に行う位置情報送受信ステップ、
前記現在位置情報取得ステップにおいて取得した自装置の現在位置情報および前記位置情報送受信ステップにおいて取得した他装置における現在位置情報に基づき、自装置の進行方向に対する他装置との位置関係を判断する位置関係判断ステップ、
前記位置関係判断ステップにおいて、自装置が他装置より進行方向に対して先行していると判断された場合は、自装置を親機として動作させ、自装置が他装置より進行方向に対して先行していないと判断された場合は、自装置を子機として動作させる動作モード決定ステップ、
前記動作モード決定ステップにおいて、自装置が親機であると判断された場合は、進行方向を示す進行方向情報を前記通信制御部により他装置へ送信させる機能を動作させ、自装置が子機であると判断された場合は、親機であると判断されている他装置より進行方向情報を前記通信制御部により受信させる機能を動作させる機能選択ステップ、
として動作させることを特徴とする、プログラム。
【請求項1】
自装置の現在位置情報を取得する位置情報取得部、
前記位置情報取得部によって取得した自装置における現在位置情報を予め登録された他装置に送信し、前記予め登録された他装置における現在位置情報を受信する制御を行う通信制御部、
前記位置情報取得部によって取得した自装置の現在位置情報および前記通信制御部の制御によって取得した他装置における現在位置情報によって判別した自装置の進行方向に対する自装置と他装置との位置関係に基づいて、自装置が他装置より進行方向に対して先行しているか否かを判断する位置関係判断部、
前記位置関係判断部において、自装置が他装置より進行方向に対して先行していると判断された場合は、自装置を親機として動作させ、自装置が他装置より進行方向に対して先行していないと判断された場合は、自装置を子機として動作させる動作モード決定部、
前記動作モード決定部において、自装置が親機であると判断された場合は、進行方向を示す進行方向情報を前記通信制御部により他装置へ送信させる機能を動作させ、自装置が子機であると判断された場合は、親機であると判断されている他装置より進行方向情報を前記通信制御部によって受信させる機能を動作させる機能選択部、
を備えることを特徴とする、進路案内装置。
【請求項2】
前記動作モード決定部において自装置が子機であると判断された場合は、前記機能選択部によって動作された機能によって他装置より受信した前記進行方向情報を表示させる制御を行う表示制御部をさらに備えることを特徴とする、
請求項1に記載の進路案内装置。
【請求項3】
前記表示制御部は、前記機能選択部によって動作された機能によって他装置より受信した前記進行方向情報を、前記通信制御部の制御によって取得した親機であると判断されている他装置において進行方向を送信した時点での現在位置情報に基づき表示させる制御を行うことを特徴とする、
請求項2に記載の進路案内装置。
【請求項4】
前記動作モード決定部において自装置が子機であると判断された場合は、前記機能選択部は、前記受信した進行方向情報に対して進行方向確認情報を前記通信制御部によって送信させる機能を動作させることを特徴とする、
請求項1から3のいずれか1項に記載の進路案内装置。
【請求項5】
自装置の現在位置情報を取得する現在位置情報取得ステップ、
前記現在位置情報取得ステップにおいて取得した自装置の現在位置情報の送信と他装置の現在位置情報の取得を、予め登録された装置間で通信することにより相互に行う位置情報送受信ステップ、
前記現在位置情報取得ステップにおいて取得した自装置の現在位置情報および前記位置情報送受信ステップにおいて取得した他装置における現在位置情報に基づき、自装置の進行方向に対する他装置との位置関係を判断する位置関係判断ステップ、
前記位置関係判断ステップにおいて、自装置が他装置より進行方向に対して先行していると判断された場合は、自装置を親機として動作させ、自装置が他装置より進行方向に対して先行していないと判断された場合は、自装置を子機として動作させる動作モード決定ステップ、
前記動作モード決定ステップにおいて、自装置が親機であると判断された場合は、進行方向を示す進行方向情報を前記通信制御部により他装置へ送信させる機能を動作させ、自装置が子機であると判断された場合は、親機であると判断されている他装置より進行方向情報を前記通信制御部により受信させる機能を動作させる機能選択ステップ、
を備えることを特徴とする、進路案内方法。
【請求項6】
進路案内装置が備えるコンピュータを、
自装置の現在位置情報を取得する現在位置情報取得ステップ、
前記現在位置情報取得ステップにおいて取得した自装置の現在位置情報の送信と他装置の現在位置情報の取得を、予め登録された装置間で通信することにより相互に行う位置情報送受信ステップ、
前記現在位置情報取得ステップにおいて取得した自装置の現在位置情報および前記位置情報送受信ステップにおいて取得した他装置における現在位置情報に基づき、自装置の進行方向に対する他装置との位置関係を判断する位置関係判断ステップ、
前記位置関係判断ステップにおいて、自装置が他装置より進行方向に対して先行していると判断された場合は、自装置を親機として動作させ、自装置が他装置より進行方向に対して先行していないと判断された場合は、自装置を子機として動作させる動作モード決定ステップ、
前記動作モード決定ステップにおいて、自装置が親機であると判断された場合は、進行方向を示す進行方向情報を前記通信制御部により他装置へ送信させる機能を動作させ、自装置が子機であると判断された場合は、親機であると判断されている他装置より進行方向情報を前記通信制御部により受信させる機能を動作させる機能選択ステップ、
として動作させることを特徴とする、プログラム。
【図1】


【図2】
【図3】
【図4】
【図5】

【図6】
【図7】
【図8】
【図9】

【図10】
【図11】
【図12】

【図13】

【図14】
【図15】
【図16】

【図17】
【図18】
【図19】
【図20】
【図21】

【図22】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22】
【公開番号】特開2013−54027(P2013−54027A)
【公開日】平成25年3月21日(2013.3.21)
【国際特許分類】
【出願番号】特願2012−130517(P2012−130517)
【出願日】平成24年6月8日(2012.6.8)
【出願人】(308036402)株式会社JVCケンウッド (1,152)
【Fターム(参考)】
【公開日】平成25年3月21日(2013.3.21)
【国際特許分類】
【出願日】平成24年6月8日(2012.6.8)
【出願人】(308036402)株式会社JVCケンウッド (1,152)
【Fターム(参考)】
[ Back to top ]