
Fターム[2D054GA04]の内容
立坑・トンネルの掘削技術 (8,857) | 制御・検知・計測・探知 (1,264) | 制御目的 (383) | 方向修正、カーブの施工 (89)
Fターム[2D054GA04]に分類される特許
1 - 20 / 89
孔軌跡の計測装置及び計測方法
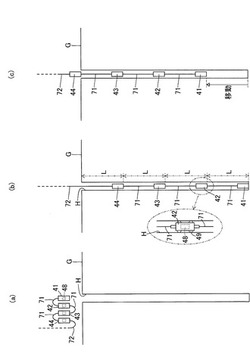
【課題】管体のズレ等を原因とする計測誤差が生じるおそれがなく、しかも計測時間が長くなるとの問題も生じない孔軌跡の計測装置とする。
【解決手段】ロール角、ピッチ角及びヨー角を検出する角度検出装置41…と操作材72とを有し、角度検出装置41…が孔H内に挿入され、この挿入状態において操作材72を引くと角度検出装置41…が孔入口側へ移動して孔Hの軌跡を計測する構成とされた孔軌跡の計測装置であって、角度検出装置41…が直列的に複数備えられ、操作材72が最も孔入口側に位置する角度検出装置44に取り付けられ、角度検出装置41…同士が所定長L離間するように連結材71によって連結され、操作材72を引くと角度検出装置41…が孔入口側へ移動して、それぞれの角度検出装置41…が隣接する角度検出装置42…までの孔軌跡を計測する構成とされる。
(もっと読む)
急曲線施工用シールド掘進機

【課題】急曲線施工に際し、ジャッキの引き抜き作業を不要とすることが可能であり、従って、カーブ用セグメントの使用数量を少なくすることができると共に、短いジャッキストロークで運転してセグメントの組立を行うことも可能な急曲線施工用シールド掘進機を提供する。
【解決手段】急曲線施工用シールド掘進機のシールドジャッキ9は、ジャッキケーシング16と、ジャッキケーシングよりも長尺で、その前後方向へ移動自在に設けられたシリンダ17と、シリンダ内方に、シリンダから突出・没入するように前後方向へ移動自在に設けられたロッド18と、第1作動油でシリンダを第1段目ストロークS1で移動させる第1油圧室25と、第2作動油でロッドを第1段目ストロークよりも長い第2段目ストロークS2で移動させる第2油圧室30と、第1及び第2油圧室へ第1及び第2作動油をそれぞれ給排する第1及び第2油圧ユニット19,20とを備えた。
(もっと読む)
削孔装置及びこれを用いた注入管の敷設方法
【課題】土質に左右されることなく計画線形に沿って正確に削孔できるようにする。
【解決手段】削孔装置1は、ロッドに連結されるアウターピース3と、アウターピース内に押し出し可能に収容されるインナーピース5と、ゾンデ・ロケータ方式による位置検知に用いられる位置情報発信装置7を有する。位置情報発信装置は、該発信装置の削孔途中での取外しと再装着を可能にする着脱機構9を装備し、内部にゾンデや傾斜計を格納している。削孔途中でパーカッションを使用する場合には、着脱機構のラッチ93を解除して位置情報発信装置だけを一時的に回収する。これにより、位置情報発信装置を衝撃から確実に保護できる状態で、削孔装置の先端に打撃力を与えることができる。パーカッションが終了したら、位置情報発信装置を元の位置に押し戻しアウターピースに再装着する。これによりゾンデ・ロケータ方式による正確な位置検知を再開できる。
(もっと読む)
シールド掘進機における推進ジャッキの推力設定方法
【課題】同時掘進組立工法において、作動中の推進ジャッキにより必要な総推力及び曲げモーメントを得てシールド掘進機の掘進方向制御を行う。
【解決手段】セグメント組立箇所に対応する推進ジャッキ群(J9〜J12)を不作動とする一方、残りの推進ジャッキを作動させる場合には、J9〜J12の中央位置を軸線角度θ2で表し、J1〜J16を、軸線角度θ2に対応する軸線AX2の両側に二分される2つのグループA2,B2に分け、各グループについて、軸線AX2の方向に傾斜する勾配を有する第1の推力分布LA2,LB2を設定する。この推力分布の勾配率は軸線方向強さr2により決定される。この推力分布に従い、各推進ジャッキの推力分担率Qi’を算出し、偏差係数αA,αBを用いて変更して推力分担率Qiを算出する。推力分担率Qiと目標総推力とに基づいて各推進ジャッキの第1の推力目標値TQiを設定する。
(もっと読む)
管設置装置及び管設置方法
【課題】計画した所望の地中位置に管を設置できる管設置装置及び管設置方法を提供する。
【解決手段】断面矩形状の管(先頭管6)を、地中10に形成された空洞部から地中に設置する場合に、先に地中に入れる管の先頭開口側の内側に、管の推進方向と交差する回転中心線Lを回転中心として回転する回転掘削体46を有した掘削機械26を設置し、管を押圧するとともに掘削機械で地中を掘削することにより、管を推進させて地中に設置する管設置装置において、管の位置を検出する位置検出手段95と、位置検出手段により得られた情報によって回転掘削体の回転方向を切換えるための回転切換手段90とを備えた。
(もっと読む)
小口径管曲線推進装置及び小口径管曲線推進工法
【課題】掘進機後退時の引抜き鋼棒による管内設備やカメラの破損を防止する。
【解決手段】カメラ2a,2b(光学式カメラ測量センサー)とターゲット2cを設置したカメラユニット2と、カメラユニット2を走行させるレール体3とを備えた撮像ユニット4を連結し、ターゲット2cをカメラ2a,2bで撮像することにより掘進機Kの位置と方向を計測し、この計測結果に基づいて小口径管5の曲線推進行い、外周面に雄ねじ6を有する引抜き鋼棒7と、雄ねじ6と遊嵌する雌ねじ8を内周面に有し引抜き鋼棒7を遊嵌状態で連結させるカプラ9と、を備え、引抜き鋼棒7をカプラ9で遊嵌することにより発進立坑Hから掘進機Kまで引抜き鋼棒7を曲線状に配置し、引抜き鋼棒7の位置を上部から下部に変換する位置変換アタッチメント10を掘進機Kと撮像ユニット4の間に介装する。
(もっと読む)
固定式計測装置及び方向制御削孔装置
【課題】作業時間が長くなるのを抑えることができ、しかも方向を制御しながら削孔するに好適な固定式計測装置を提供する。
【解決手段】削孔管先端部50Fに角速度検出手段AD、傾斜角検出手段BD及びこれらのケース体を設けた削孔装置と、孔先端部の現在位置を計測する挿入式計測装置40と、削孔管5を引き戻した後、削孔区間の基端から先端まで推進させつつ、角速度検出手段ADにより角速度を検出し、積分して方位角変化量を求め、他方で、傾斜角検出手段BDにより削孔区間の先端における傾斜角を検出し、これらの値を用いて削孔区間の基端に対する先端の相対位置を求める機構と、これらの作業を所定回繰り返した段階で、削孔管5内に挿入式計測装置40を挿入し、削孔管先端部50Fまで移動させて孔先端部の現在位置を計測し、この計測値に基づいて孔先端部の現在位置を補正する機構とを備える。
(もっと読む)
シールドマシンおよびシールドマシンの姿勢制御方法
【課題】シールドマシンにおけるピッチング制御を適宜なコストで容易なものとする。
【解決手段】シールドマシン10の構造体に対し、片持ち梁30の一端31を、該片持ち梁がシールドマシン後方に伸びるよう固定し、前記片持ち梁30の他端32に錘40を設置する。
(もっと読む)
削孔工法
【課題】可撓性ロッドを具備する自在ボーリングマシンを用いて削孔を行った後に、掘削されたボーリング孔の崩壊或いは崩落を防止して、その後の作業に必要な機器を確実に予定箇所へ到達させることが可能な削孔工法の提供。
【解決手段】削孔手段(16)から削孔流体を噴射して地盤を削孔し、閉鎖部材(3)を押圧し前記固定手段(20)を剪断破壊して閉鎖部材(3、3A)を前記ロッド(10)外側の領域(地中の領域101)に押し出し、削孔後の作業に必要な機器(7、7B、8)を前記ロッド(10)内側の中空部分(13)内へ挿入して当該ロッド(10)の先端まで移動する。
(もっと読む)
自動測量方法
【課題】掘進機の位置及び向きの自動測量に関し、掘進機の位置及び向きを、測量することができる自動測量方法を提供する。
【解決手段】下記の手順により掘進機の位置及び向きを自動測量する。(1)自動追尾式測距測角儀の前回測量時の位置データ及びそれ以降の移動データから、自動追尾式測距測角儀の今回測量時の位置及び向きを予測し、坑口側に設置した複数の基準点の視準角を予測する工程。(2)(1)の予測結果をもとに、自動追尾式測距測角儀から、坑口側の複数の基準点を視準して自動追尾式測距測角儀の位置を検出する工程。(3)掘進機の測量位置データから、掘進機に設置した複数のターゲットの位置及び視準角を予測する工程。(4)(3)の予測結果をもとに、自動追尾式測距測角儀から掘進機に設置した複数のターゲットの位置を検出する工程。(5)掘進機の複数のターゲットの位置の検出結果をもとに、掘進機の位置と向きを求める工程。
(もっと読む)
推進管方向可変構造
【課題】鋼管による推進管の方向修正を容易に可能とする。
【解決手段】鋼管2による推進管の方向可変構造であって、推進機1と鋼管2との間にヒューム管3を設置する。具体的には、ヒューム管3は、推進機1内にシール材とともに挿入して接続する。また、ヒューム管3と鋼管2は、止水性を具備するアダプタリング4を介して接続する。
(もっと読む)
掘進機
【課題】地中に推進管を埋設するために用いられる掘進機および方向修正装置の耐久性を向上する。
【解決手段】カッターヘッドを備えた先頭体と、本体と、先頭体を支持する方向修正装置とを備えており、方向修正装置は、掘進機の本体の先端付近に備えられるジャッキシリンダと、掘進機の先頭体の後端付近に備えられるジョイントとを有しており、ジャッキシリンダは、本体の内側面に設置された支持台に設けられた貫通孔と、ジャッキシリンダの貫通孔とに軸を挿通することで、少なくとも上下方向に回転駆動可能であり、その前端部には、先端付近が球体または略球体状に成形されたシリンダロッドを備えており、ジョイントは、その内面が、シリンダロッドの球体または略球体と同一またはほぼ同一の大きさの球面または略球面に成形されており、ジョイントの内面とシリンダロッドの球体または略球体とが嵌合することにより、掘進機の先頭体を首振り自在に支持する。
(もっと読む)
掘削孔用装置
【課題】掘削孔用装置に搭載された慣性センサからの慣性データ信号における不要な振動に対して減衰効果を与える電子回路を提供する。
【解決手段】指向性装置22はゾンデの形状の円筒ハウジング32を有する。従来型のバッテリーパック43と指向性装置34とがハウジング32の内部に搭載されている。三つの減衰回路36、ADC38、信号処理回路40、MWD遠隔測定ユニット42、三つの慣性センサ44、46、48、及び三つの磁力計44’、46’、48’などの部品が指向性装置の内部に搭載されている。慣性センサのそれぞれに一つが対応するよう減衰回路36がある。指向性装置が掘削による振動をうけると、加速度計からの出力電流は、その上に重ねられた周期的又は非周期的なAC様の波形を有する。しかし減衰回路のコンデンサのリアクタンスは周波数と共に増加し、低域フィルターは出力電流中のそのようなAC周波数成分を地面へと短絡する。
(もっと読む)
推進シールド工法におけるシールド掘進機の掘進方向制御装置
【課題】 電磁波を用いてシールド掘進機の位置や姿勢の確認を行ない、到達予定位置まで正確に誘導することができる推進シールド工法におけるシールド掘進機の掘進方向制御装置を提供する。
【解決手段】 所定位相の電磁波を発振する発振手段と、符号発生手段からの符号信号と上記電磁波とを合成し、合成電磁波を生ずる合成手段と、上記シールド掘進機に設けられ、上記合成電磁波に対応した磁場を形成して送出する送信手段と、上記シールド掘進機の到達予定位置に設けられ、上記磁場を検出して上記合成電磁波を受信する受信手段と、受信された合成電磁波を上記符号信号と同期した符号信号を用いて波形反転演算を行ない、上記所定位相の電磁波と同位相の電磁波を取り出す演算手段と、上記演算手段によって取り出された電磁波の強度に応じて上記シールド掘進機を上記到達予定位置に誘導する制御手段とを備えた構成。
(もっと読む)
推進シールド工法におけるシールド掘進機の掘進方向制御装置
【課題】 電磁波を用いてシールド掘進機の位置や姿勢の確認を行ない、到達予定位置まで正確に誘導することができる推進シールド工法におけるシールド掘進機の掘進方向制御装置を提供する。
【解決手段】 シールド掘進機の後方に埋設管を結合した推進体を立抗から掘削しながら推進させ、上記埋設管によって形成される管路を敷設する推進シールド工法において、上記シールド掘進機に電磁波を送信する送信コイルを装着し、上記シールド掘進機の到達予定位置に上記電磁波の受信コイルを設けると共に、上記受信コイルを上記立抗に向かって延在する軸に対して回転し得るように形成し、上記受信コイルの受信強度にもとづいて上記シールド掘進機を上記受信コイル位置に誘導するようにした構成。
(もっと読む)
推進シールド工法におけるシールド掘進機の掘進方向制御装置
【課題】 電磁波を用いてシールド掘進機の位置や姿勢の確認を行ない、到達予定位置まで正確に誘導することができる推進シールド工法におけるシールド掘進機の掘進方向制御装置を提供する。
【解決手段】 シールド掘進機に設けられ、所定位相の磁場を形成する電磁波を送信する送信手段と、上記シールド掘進機の到達予定位置に設けられ、上記磁場と、上記磁場に起因する誘導電流によって形成された位相の異なる磁場との合成磁場に対応した電磁波を受信する受信手段と、受信された電磁波をフーリェ変換することにより上記磁場に対応する成分と上記位相の異なる磁場に対応する成分とに分離する分離手段と、分離された上記所定位相の磁場に対応する成分の強度に応じて上記シールド掘進機を上記到達予定位置に誘導する制御手段とを備えた構成。
(もっと読む)
削孔管の先端位置測定方法および先端位置測定システム
【課題】小径の削孔管や地上構造物がある場所などであっても正確かつ容易にその先端位置の測定が可能な削孔管の先端位置測定方法および先端位置測定システムの提供。
【解決手段】地中を削孔しながら推進する削孔管Cの先端位置を測定する方法であって、前記削孔管Cの推進方向後端側に受信器30を設けると共に、前記削孔管Cの先端が推進する地中の所定の位置に複数の発信器20を埋設しておき、前記各発信器20から前記削孔管Cの先端方向に測定用音波を発信して当該削孔管Cを伝播する各測定用音波を前記受信器30によって受信した後、受信した各測定用音波を解析して前記削孔管Cの先端位置を測定する。これによって、小径の削孔管や地上構造物がある場所などであっても正確かつ容易にその先端位置を測定できる。
(もっと読む)
削孔機における先端ビットの偏位方向検出装置及び削孔方法
【課題】 削孔管の先端に取り付けた先端ビットの向きを正確に検出することにより、精度の高い削孔を行うことが可能な、削孔機における先端ビットの偏位方向検出装置及び削孔方法を提供する。
【解決手段】 削孔管20の先端部に設けた先端ビット40に取り付けた固定磁石部60と、固定磁石部60に対向するように、削孔管20内に挿入するジャイロスコープ30の先端部に取り付けられ、当該ジャイロスコープ30の中心軸方向を回転軸として回転可能であり、固定磁石部60との間に生じる吸引力及び反発力により、固定磁石部60に対して所定位置に停止する回転磁石部70と、回転磁石部70の回転角度を計測する回転角度計測器80と、を備える。
(もっと読む)
小口径管泥水式曲線推進装置及び小口径管泥水式曲線推進工法
【課題】小口径管であっても、長距離の泥水式曲線推進を可能とする。
【解決手段】
小口径管泥水式曲線推進装置1は、ケーシング2と、ケーシング2の軸方向に固定された送泥管3及び排泥管4と、ケーシング2の端部に固定され、送泥管3及び排泥管4をそれぞれ取り付ける取付孔50,51を備えた接続ブロック5と、ケーシング2の軸方向に固定されたレール6と、ケーシング2に設けられ、小口径管7とケーシング2の間隔を保持する保持部材80と、を有する接続体8を備え、推進の前後方向を撮像するカメラ9と、カメラ9の近傍に設けたターゲット10と、カメラ9とターゲット10とを一体に固定するカメラキャリア11と、を備えている。
(もっと読む)
推進工法および地中管路
【課題】余堀りを行いながら地中に所定長さの地中管路を形成していく推進工法において、推進管群に蛇行が生じさせないようにする。
【解決手段】余堀りを行いながら地中に所定長さの地中管路を形成していく推進工法であって、始点aおよび終点bである地中管路20を形成するに際し、緩和曲線領域Y1,Y2が形成されるように掘進機を進行させる。緩和曲線領域Y1とY2の間を単曲線領域Xで接続する。直線領域が少ないので、余掘りした掘削穴内で推進管群が蛇行するのを防ぐことができる。
(もっと読む)
1 - 20 / 89
[ Back to top ]