
Fターム[2D054GA82]の内容
立坑・トンネルの掘削技術 (8,857) | 制御・検知・計測・探知 (1,264) | 検出手段 (180) | 光・レーザ光によるもの (65)
Fターム[2D054GA82]に分類される特許
41 - 60 / 65
管部材等の推進装置
【課題】大型の施工機械を用いる必要がなく、工事に際して大がかりな交通規制をする必要のない管部材等の推進装置の提供を課題とする。
【解決手段】地中に埋設すべき推進管(管部材)13a内に,隙間をあけて挿入されるインナーケーシング14と、推進管13aの先端から露出されると共に、掘削水を吐出する吐出口を有する掘削ヘッド15と、推進管13aの後端に回転力及び推進力を加えることによって、管部材13とインナーケーシング14とを地中に推進させる小口径推進機16と、小口径推進機16による管部材13aの推進方向を鉛直下方向とした状態で、小口径推進機16を支持する架台22と、インナーケーシング14に溶接等で一体に接続され、推進管13a内周に接することなく挿入されると共に、掘削ヘッド15の吐出口に掘削水を供給する送水管とを備えた。
(もっと読む)
小口径管埋設用先導体

【課題】 200mm程度の小口径塩ビ管にも適用可能な泥濃方式で、各種条件の地山・切羽の安定、施工の高速化、立坑設備の簡素化が行なえ、長距離土砂移送効率が高く、道路開放に好適で、施工精度の高い小口径管埋設用先導体を提供する。
【解決手段】 水密状態で連結された複数の外筒からなり、前面に土砂切削装置を有し後端に小口径管を連結する先導体外筒と、掘削土砂が注入された添加材と共に攪拌された掘削流動化土砂を所定の切羽圧力が保持されるように土圧センサ及びピンチバルブにより調圧する土圧調整装置と、掘削流動化土砂を小口径管の後端に亘り内部に延設された排泥管状体を介して地上のバキューム装置によりバキューム吸引排土する排土装置と、さらに先導体外筒の上下を貫通して立設された密閉縦型筒状ケーシング内の上方部に縦型電磁コイル及びその下半部に交叉する排泥管に連結可能な排泥用通路を有する縦型誘導磁界発生装置と、を備えた。
(もっと読む)
コンテナの位置決め機構及びこれを用いた制御方法
【課題】短時間でしかも精度よくコンテナを所定位置に位置決めして停止させることで、作業効率を向上させるようにした。
【解決手段】コンテナ3の位置決め機構1は、コンベア10の移動方向に対して直交する方向に光線を送出する発光器および光線を検知する受光器からなる第一乃至第三の光センサーS1、S2、S3を備えてなる位置検知手段20と、コンベア10に固定されていてコンテナ3を把持位置M1に位置決めさせる位置決め装置30とを備えている。第一光センサーS1で第一光線L1がコンテナ3によって遮断される非受光信号を検知すると共に、第二及び第三光センサーS2、S3で第二及び第三光線L2,L3がコンテナ3の両端を通過した信号を検知したときにコンテナ3が所定範囲内で粗位置決めされ、位置決め装置30によってコンテナ3を押圧させながら係止して位置決めする。
(もっと読む)
石綿管の撤去方法
【課題】地中横方向に埋設された石綿管を容易に撤去、回収できるようにする。
【解決手段】地中横方向に埋設された石綿管1の内部にノズル装置2を備えたホース3を差し入れ、そのノズル装置2の噴射口2aから管内面1aへ高圧水を噴射し、その水圧で前記石綿管1を破砕する。ノズル装置2とホース3とは、スイベルジョイント4を介してそのホース3の軸周り回転可能に接続されており、水の噴射方向は、その噴射によりノズル装置2に軸周り回転力を付与する方向に設定されている。また、噴射口2aは周方向に沿って複数設けられて、各方向への噴射量が異ならせているので、高圧水の噴射によりノズル装置2は管内面1aのいずれかの側に近づき、その状態で周方向に移動する。そのノズル装置2を管軸方向に沿って移動させれば、高圧水の噴射位置は管内面1aに沿ってスパイラル状に移動するので、石綿管1をその全長、全周に亘ってムラなく破砕することができる。
(もっと読む)
小口径管推進装置
【課題】 先端ビット部をケーシングとともに回収することにより、先端ビット部回収のための立坑を不要とし、先端ビット部を再利用でき、先端ビット部を地中に残すことなく環境保全のために良好である小口径管推進装置を提供する。
【解決手段】 埋設管2と、ケーシング3と、オーガスクリュー4と、先端ビット部5とを有する小口径管推進装置1であって、先端ビット部5の先端に備わる先端ビット9と、刃先を埋設管2の内径より外側に突出させた可動ビット7は、その形状全体を埋設管2の内径より内側の位置に収容可能であり、可動ビット7が埋設管2の内径より内側の位置にある状態で、先端ビット部5が埋設管2内を挿通可能である。
(もっと読む)
シールドトンネルの施工管理方法、施工管理装置、並びに、施工管理プログラム
【課題】従来のシールドトンネルの施工管理方法によれば、シールドマシンの方向制御作業を運転者の経験と勘に頼って行うので、運転者の経験や勘の違いによって、シールドマシンの方向制御作業の精度に差異が生じてしまう。
【解決手段】処理装置にシールドトンネルの施工計画線情報及びトンネル掘削施工過程でのシールドマシンの現状位置情報を入力することによってシールドトンネルの施工計画線及びシールドマシンの現状位置を出力させるとともに、処理装置にシールドマシンの現状位置からの進行予想情報を入力することによって施工計画線に対するシールドマシンの最適な進行予想位置を出力させ、この最適な進行予想位置を出力させるために処理装置に入力した進行予想情報に基づいてシールドマシンを掘進させる。
(もっと読む)
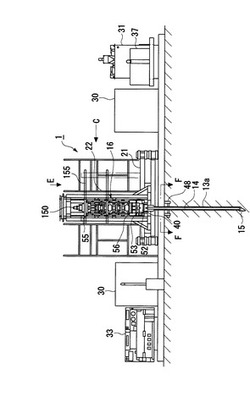
小口径管掘進用装置と掘進システム
【課題】 高価な掘進機の製作を必要とすることなく、施工単価の上昇を抑え、しかも立坑の設置を極力抑えて、直線施工とともに曲線施工を含む長距離の小口径管の推進を実現する。
【解決手段】 小口径管直線・短距離専用掘進機(A)の後端部に連結固定される前筒部(B1)と、その後端部において推進管あるいは仮管(C)に連結される後筒部(B2)とを備え、前筒部(B1)と後筒部(B2)とが曲線造成用ジャッキ部(B3)の介設により立体的に動くようにした機構を有し、後筒部(B2)には磁力線発生装置(B4)とレベル測定装置(H)とが搭載されているとともに、方向変化の計測装置が配設されている小口径管掘進用装置(B)とする。
(もっと読む)
トンネル支保工の沈下抑制方法
【課題】支保工の沈下を抑制するパイルを、手軽な部材を利用し容易な手順で、従来と遜色なく適切に地盤に打設することが可能なトンネル支保工の沈下抑制方法を提供する。
【解決手段】トンネル壁面1aから側方地盤へ向けて観察用孔部4を形成する孔部形成工程と、観察用孔部に、地盤の緩み部Xから作用する荷重で変形し得る観測用パイプ5を挿入するパイプ挿入工程と、観測用パイプの変形状態をトンネル1側から観察し、変形状態から緩み部とその外側の健全部Yとの境界位置Bを推定し、推定した境界位置からトンネル壁面までの距離Lを計測する観測工程と、計測した距離に、健全部へ根入れする長さを加えた長さ寸法のパイル3を、観察用孔部近傍位置のトンネル壁面から側方地盤へ横向きに打設するパイル打設工程とを備える。
(もっと読む)
筒状リングの歪み形状計測方法及びプログラム
【課題】撮影上の障害物が存在する条件下でも適用できる筒状リングの歪み形状計測方法及びプログラムを提供する。
【解決手段】所定内周長さGの筒状リングAの内周面に、リング中心軸Cの直交断面Fと交差する交線L上に沿って所定角度位置θkの計測視標Tkの群を取り付け、リング内側の可動撮像機10により異なる位置・姿勢から計測視標Tkが写り込む画像Igの群を撮影する。各画像Ig内の計測視標Tkの像の二次元座標と各計測視標Tkの所定角度位置座標とから各画像Igの撮影位置・姿勢を検出し、各画像Ig内の計測視標Tkの像の二次元座標と各計測視標Tkの所定角度位置座標と各画像Igの撮影位置・姿勢とに基づくバンドル調整により各計測視標Tkの三次元座標(X,Y,Z)を算出する。更に、各三次元座標(X,Y,Z)を結ぶ多角形の周囲長さQと所定内周長さGとの縮尺Sに基づき補正した補正三次元座標(Xs,Ys,Zs)により、筒状リングAの歪み形状を計測する。
(もっと読む)
既設埋設管破砕用カッタヘッドの案内装置
【課題】 推進オペレータ自らがカッタヘッド案内装置のローリング量を確認し、カッタヘッド案内装置制御手段の操作もその場で行え、作業性の優れた既設埋設管破砕用カッタヘッド案内装置を提供する。
【解決手段】 カッタヘッド案内装置100にローリング量自動計測手段90を備え、且つ発進坑内3又は推進オペレータ用操作盤85にローリング量表示と、カッタヘッド案内装置100の上下方向揺動手段60及び水平方向揺動手段70の操作機能と、を配すると共に、カッタヘッド案内装置100自体に駆動用油圧ユニット付制御手段80を搭載する。
(もっと読む)
推進シールド工法におけるシールド掘進機の掘進方向制御装置
【課題】従来のようにターゲットからの反射光を利用せずに距離の計測やシールド掘進機の位置や姿勢の確認ができ、中間計測機に傾斜計等を搭載しやすい構成とし、更に中間計測機の埋設管内での移動がスムースにできるシールド掘進機の推進方向制御装置を提供する。
【解決手段】シールド掘進機1に設けられ、後方に向けて発光する面光源からなるターゲット1Bと、シールド掘進機の水平方向または埋設管の延長方向の傾斜角度を計測する傾斜計1Cと、立抗4内に設けられターゲットの発光を撮像してターゲットの変位量を確認するカメラまたは撮像装置5と、カメラまたは撮像装置によって確認されたターゲットの変位量と距離と傾斜計の角度とにもとづいてシールド掘進機の位置及び姿勢を求める演算手段26とを備え、演算手段の演算結果にもとづいてシールド掘進機の推進方向と、推進計画線との誤差を演算し、シールド掘進機の推進方向を制御するもの。
(もっと読む)
シールド掘進機、およびテールクリアランスおよび/またはセグメントトンネル内空寸法の測定方法
【課題】 掘進機の掘進とテールクリアランス等の計測を並行しておこなうことができ、マシンテール後方の任意のセグメントリングの内空寸法を自動計測することのできるシールド掘進機、およびテールクリアランスおよび/またはセグメントトンネル内空寸法の測定方法を提供すること。
【解決手段】 シールド掘進機1を構成するスキンプレート2の内部で、該シールド掘進機1の延伸方向に延びる通路用配管4の回りを回転可能で、その延伸方向に移動可能な移動装置6と、移動装置6に装着された伸縮装置71,71と、伸縮装置71の先端に装着された距離センサ81が設けられている。移動装置6の通路用配管4まわりの回転と、通路用配管4の延伸方向への移動に応じて、距離センサ81がスキンプレート2の内面までの距離とセグメントまでの距離を測定することにより、テールクリアランスや、セグメントリングの真円度などを自動測定することができる。
(もっと読む)
小口径推進工法
【課題】 発進からの直線区間に続いて次に曲線区間を有する線形を有する現場を、より簡便に安価な工事費で良好な施工性をもって小口径推進を実現可能とする新しい技術手段を提供する。
【解決手段】 発進立坑からの直線区間に続いて次に曲線区間を有する線形での小口径推進工法であって、到達点から曲線開始位置までの長さ分には掘進機、ポンプ筒、強制管および誘導機が配置され、曲線開始位置から発進立坑までの直線長さ分には推進管(ヒューム管)が配置されるように、直線区間でのレーザーによる測量と直線区間並びに曲線区間での測量ロボットの走行による測量とを組み合わせて測量して掘進する。
(もっと読む)
推進機位置計測システム
【課題】 推進管がローリングしてもターゲットの画像が変位するのを防止すること。
【解決手段】 推進機10に連結される推進管12に設置されて測点Si間の挟角θiに関する情報を演算装置18に転送する計測装置16は、前方用撮像素子58と後方用撮像素子60を収納する内部筐体20と、前方用ターゲット36と後方用ターゲット38が固定されたカバー24と、カバー24に連結された外部筐体22を備え、内部筐体20はベアリング48、50を介して外部筐体22に回転自在に支持され、内部筐体20の底部には内部筐体20の重心を鉛直線上にバランスさせるためのバランスウエイト62が固定されており、推進管12のローリングに伴って外部筐体22がローリングしても、内部筐体20の重心はバランスウエイト62によって常に鉛直線上に維持される。
(もっと読む)
掘削機の掘削地点評価装置
【課題】 推進管(一般に「円筒形のヒューム管」)の角度方向の連結部分(曲線部分)に柔軟に対応する掘削機の掘削地点評価装置を提案すること。
【解決手段】 トンネル内を掘り進む掘削機に後続状態に連結された前方側推進管と後方側推進管に目視可能な範囲内でそれぞれ水平バランス用吊り下げ手段を介して複数個の接続手段を設け、また各接続手段に先端部及び後端部がそれぞれ連結された長さが既知の複数本の棒状体を設け、接続手段に設けられかつ接続手段の回転体の回転角をそれぞれ検出する検知手段の角度信号及び棒状体の長さに関する情報に基づいて掘削機の現在位置を評定すること。
(もっと読む)
変位計の位置計測方法および位置計測装置
【課題】 小形軽量で、狭隘な設置スペ−スに設置できるとともに、計測器等の修理や部品交換に容易に応じられる、変位計の位置計測方法および装置を提供する。
【解決手段】 距離計測手段30を介し、最先の一対の変位計28の両端部と、その枢支部27の少なくとも3位置の三次元位置を基準値として計測する。 前記一対の変位計28の折れ角の初期値を演算する。 この後、前記変位計28に一対の変位計28を順次連結して延伸する。 その際前記距離計測手段30を介して、延伸した一対の変位計28の両端部と、その枢支部27の少なくとも3位置の三次元位置を計測する。 前記延伸した一対の変位計28の折れ角を算出する。 前記折れ角と、延伸した変位計28の枢支部27における三次元位置と、延伸に伴ない変化する先行の折れ角を相対量として検出する。 前記検出角度と変位計28の長さを基に、最先または所望の変位計28の位置を演算する。
(もっと読む)
管路位置測定システム
【課題】 推進工法やシールド工法等における見通しの効かない管路の施工時であっても、管路先端部の位置をリアルタイムで測定する。
【解決手段】 基点部8と管路4の先端部5との間に掛け渡され、節点9を有する線状体11と、節点9での基点部8側と先端部5側の線状体11の軸方向角度をそれぞれ検出する角度検出装置12と、基点部5での線状体11の軸方向角度を検出する角度検出装置14とを備え、各角度検出装置12,14で検出された線状体11の軸方向角度と、線状体11の長さとから、隣接する線状体11の節点9の座標を順次算出して、管路4先端部5の位置を測定するように構成した。
(もっと読む)
掘削機並びに掘削システム及び掘削方法
【課題】 トンネルの掘削を行うにあたり熟練度を必要とせず、掘削作業を安全に行うことができる掘削システムを提供する。
【解決手段】 上記目的を達成するための掘削システムは、拡散型のレーザを照射する3次元レーザレーダと、掘削機に備えられた掘削手段や駆動手段を動作させる駆動制御装置と、を備えた掘削機と、前記掘削機の動作を監視、あるいは掘削機を遠隔操作する操作・監視手段と、前記3次元レーザレーダに対して制御信号を出力すると共に3次元画像作成情報を得、当該3次元画像作成情報に従って3次元画像データを作成し、作成された3次元画像データを前記操作・監視手段に送信し、前記3次元画像に基づいて計測対象面の掘削箇所を特定し、特定した掘削箇所を掘削する旨の信号を前記駆動制御装置へ出力する演算装置と、を備えたことを特徴とする。
(もっと読む)
既設埋設管破砕用カッタヘッドの案内装置および案内方法と既設埋設管の更新方法
【課題】 既設埋設管破砕用カッタヘッドを振れ回りを防止しつつ、計画線に沿わせて確実に前進させることができる案内装置を提供する。
【解決手段】 本発明の案内装置100によれば、上下方向揺動手段60および水平方向揺動手段70を用いて揺動部材40を揺動させることにより、既設埋設管1に係合している係合体30を基準として、この揺動部材40の後端に接続されているカッタヘッド7を所望の位置に案内して位置決めし、固定することができる。
(もっと読む)
変位計測装置及びこれを用いたトンネルの情報化施工方法
【課題】 不連続面を挟む両側岩盤の相対的変位を三次元的に検出し、計測コストの低廉化が図れる変位計測装置を提供する。
【解決手段】 変位計測装置1は岩盤2内に孔井3を削孔し亀裂などの不連続面4を挟む両岩盤に固定する。変位計測装置1は固定手段5によって固定設置された前部構造体6と後部構造体7を有する。前部構造体6は孔井軸に直交する壁面8に照準9を貼着する。後部構造体7の前方には撮像手段としてのカメラ10を設ける。カメラ10により取得した照準9の光学画像を二値化解析してモニター画面に二値化照準画像を表示し照準中心の座標変化と照準輪郭線の変化を評価して岩盤2の相対的変位を三次元的に検出するほか、相対的な傾斜角も評価できる。照準と撮像手段からなる一系統の計測手法によって相対的な三次元変位を検出評価するので低コストでの多種計測が実現できる。
(もっと読む)
41 - 60 / 65
[ Back to top ]