
Fターム[2D054GA82]の内容
立坑・トンネルの掘削技術 (8,857) | 制御・検知・計測・探知 (1,264) | 検出手段 (180) | 光・レーザ光によるもの (65)
Fターム[2D054GA82]に分類される特許
21 - 40 / 65
推進工法用測量ロボット装置
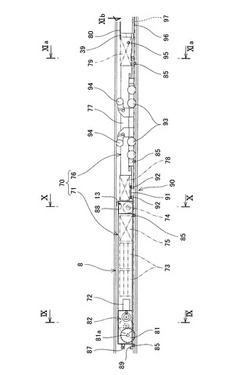
【課題】 埋設管を地中に直接埋設する推進工法で、掘進機を曲線推進させた路線でも安定して測量することができる低コストの推進工法用測量ロボット装置を提供すること。
【解決手段】 埋設管の内部に、軸方向に貫通する空間を有するインナー管8を挿通し、発進立坑に設置した元押装置で掘進機に推進力を与えて掘削した地中に前記埋設管を埋設して管路を形成する推進工法における測量ロボット装置70に、前記インナー管8の貫通する空間10を自走する起動台車71と、この起動台車71に連なって前記インナー管8の空間10の軸方向に敷設した1本のレール12に沿って走行する測量ジャイロ台車76とを備えさせ、この起動台車71と測量ジャイロ台車76とは屈曲可能に連結され、前記起動台車71は、自走して前記測量ジャイロ台車76を牽引する駆動機72と、距離計測器74と、起動台車制御器75とを有し、前記測量ジャイロ台車76は、ジャイロ77と、ジャイロデータ収集器79とを有しているようにする。
(もっと読む)
テールクリアランス測定装置

【課題】測定効率の向上を図れると共に、作業員の負担の軽減を図る上で有利なテールクリアランス測定装置を提供する。
【解決手段】テールクリアランス測定装置30は、カメラ部42と、検出光投射部44と、コンピュータ34とを含んで構成されている。検出光投射部44により線状の検出光Lsをセグメント端面箇所Seに投射すると共に、カメラ部42によって撮像されたテール部内周面箇所Ti、セグメント外周面箇所So、セグメント内周面箇所Si、セグメント端面箇所Seの画像データに基づいて画像データに基づいてテールクリアランスTcを導出する。
(もっと読む)
推進工法用測量装置
【課題】 埋設管を地中に直接埋設する推進工法で、掘進機を曲進させた掘進路線でも安定して測量することができる低コストの推進工法用測量装置を提供すること。
【解決手段】 埋設管の内部に、軸方向に貫通する空間を有するインナー管8を挿通し、発進立坑に設置した元押装置で掘進機205に推進力を与えて掘削する地中に前記埋設管を埋設して管路を形成する推進工法における測量装置1に、前記インナー管8の貫通する空間を自走する起動台車71と、該起動台車71に連なって前記インナー管8の空間の軸方向に敷設したレール12に沿って走行する測量ジャイロ台車76と、前記掘進機205の発進立坑方向に配設した、前記起動台車71を収納する起動台車収納管2と、前記測量ジャイロ台車76の測量終点となるステーション管5と、前記発進立坑で前記測量ジャイロ台車76の測量始点を設定するランチャーとを備えさせる。
(もっと読む)
掘進機の位置確認方法、掘進機
【課題】地中を掘進する掘進機の位置確認を、構造簡単にして低コストに、且つ、正確に行う。
【解決手段】シールド掘進機1Aには、基準位置に対する相対位置情報が表示された表示面を裏側にしてターゲットプレート(面板9A)が設けられている。2台のシールド掘進機の距離が所定距離に縮まった状態で、シールド掘進機1Bの側からボーリングロッド21によりボーリングし、面板9Aを穿孔してサンプリング片を採取する。当該サンプリング片の表示内容により当該サンプリング片の前記基準位置からのずれ量を求め、これをもとにシールド掘進機1Aとシールド掘進機1Bとの相対位置を確認する。
(もっと読む)
地中掘進装置
【課題】地中を掘進する掘進ヘッドの角度を検出し、その信号を確実にキャッチする。
【解決手段】掘進ヘッドの後方に接続した管状の連結ロッドを前進および回転させて地中を掘進する地中掘進装置において、掘進ヘッド2に角度センサ1を接続し、掘進ヘッド2の鉛直方向に対する角度が所定値であることを検知して発光する発光ダイオード16を備えるようにする。地中の掘進なので後方の孔が屈曲していたり水が入っていたりしても光は確実に検出できるから、掘削が地中の奥深くにまで進行した状態であっても掘進ヘッド2の角度を確実に知ることができ、その結果、その角度を基準として掘進ヘッド2の角度を調整することにより、施工精度が向上する。
(もっと読む)
掘進機
【課題】掘削経路の途中でも、構成要素の一部を掘削経路中に残し、残りを掘削開始地点まで戻すこと。
【解決手段】筒体28に回転自在に連結された外周側カッタヘッド16を備えた固定要素12と、外筒18と駆動部本体20とカッタ駆動軸22と油圧モータ24および内周側カッタヘッド26を含む移動要素14とを互いに分離可能に構成し、トンネル内に障害物が存在するときには、移動要素14に対して、坑口側に引き戻す方向の力を作用させて、移動要素14を固定要素12から分離し、移動要素14を坑口側に引き戻すことで、カッタヘッド16の内側と筒体28内に、作業員が移動可能な空間部132が形成される。このため、作業員は、掘削開始地点の坑口から筒体32、28や空間部内を移動して、トンネル内の障害物を除去する作業を行うことができる。
(もっと読む)
推進工法における管路の位置検出方法、その装置及び当該装置を用いた推進工法
【課題】小口径管の推進工法において、高精度の位置計測と迅速な施工を実現できる埋設管路の位置検出方法。
【解決手段】内管の隣接する一方の内管に投光部7を、他方の内管に受光部8を相対向して設け、前記投光部8に設けた第1レーザ照射器9からレーザ光を、第1ハーフミラー10を通して前記受光部8の可動ミラー12に照射し、ここで反射した光を投光部7の第1ハーフミラーで反射させて第1CMOSセンサー11でこれを受け、隣接する内管が直線接続されている状態では、前記第1CMOSセンサー11の原点で前記レーザ光を受光し、前記隣接する内管が屈曲接続されている状態では、前記第1CMOSセンサー11の原点からずれた箇所で前記レーザ光を受光し、レーザ光が原点からずれた箇所で受光した場合に、前記可動ミラー12を動かして前記レーザ光の受光点を原点に戻し、その時の前記可動ミラーの動きを計測して折曲角度を検出する。
(もっと読む)
地中位置検知システム
【課題】 配管(パイプ)の回転にもかかわらず、配管の先端部位を的確に検知することができる地中位置検知システムを提供する。
【解決手段】 水平ボーリング工法に用いる地中位置検知システムにおいて、回転しながら掘進する配管内に長手方向の回転を拘束して接続した同じ長さの2本のリンクL1 ,L2 を配設し、前記2本のリンク中の掘削原点側の第1リンクL1 に取り付けた3個の加速度センサ3によって求めた重力ベクトルの方向から前記第1リンクの姿勢と、前記第1リンクと第2リンクの接続点の位置を求め、前記第1リンクと該第1リンクに接続される掘削原点とは反対側の前記第2リンクのなす角を測定して、これらの観測量から前記第2リンクの姿勢を求め、リンク1本分掘り進んだときに2本のリンクが同一経路を通過していれば前ステップの前記第2リンクの姿勢及び位置と前記第1リンクの姿勢及び位置が等しくなることを利用して前記配管内のリンク先端の座標を逐次求める。
(もっと読む)
位置計測システムおよび位置計測方法
【課題】 掘進機の位置および向きを迅速に計測できる位置計測システムおよび位置計測方法を提供することができる。
【解決手段】 本発明は、掘進機の位置および向きの計測に利用される位置計測システムであって、掘進機が地中に形成した構造物に沿って掘進機の進行方向の後方に連なって配置される複数の撮像手段と、掘進機の後部および撮像手段の後部に固定されたターゲット部材と、撮像手段に固定されたターゲット部材を撮像するように配置され、位置および向きが既知の基準撮像手段と、掘進機の位置および向きを算出する位置算出手段とを備え、ターゲット部材は、立体的な位置関係を有する4つ以上の撮像ターゲットを有し、撮像手段は掘進機の進行方向の直前に位置するターゲット部材を撮像し、位置算出手段は撮像手段および基準撮像手段が撮像したターゲット部材の画像データと基準撮像手段の位置および向きとに基づいて掘進機の位置および向きを算出する。
(もっと読む)
既設埋設管改築工法用カッタガイド装置および同工法
【課題】カッタヘッドの回転に引きずられてカッタガイドがローリングするのを防止するともに、ローリングが生じたとしても正しい位置関係に容易に修正できるようにする。
【解決手段】推進機のスクリュー16から回転トルクが伝達されるカッターヘッド17に軸受を介して連結され、埋設管12の管内に移動自在に挿入されるカッタガイド40と、埋設管12内をカッタガイド40の先頭に先行するローリング修正装置を設け、このローリング修正装置には、埋設管12の内周面に食い込み可能なエッジを有する転動体56と、転動体56のエッジの向きが進行方向に対してねじれ角をもつように該転動体を揺動させるカム機構と、このカム機構を駆動する駆動部60とを設ける。
(もっと読む)
曲線推進工法
【課題】長距離の曲線推進が可能な低耐荷力方式の曲線推進工法を提供すること。
【解決手段】低耐荷力に使用される推進管1を、推進管1と地山との周面摩擦抵抗力が推進管1の許容耐荷力を下回る本数ごとに、元押しジャッキからの推力を伝達する推進伝達インナーユニット5に設置された推進管支持部材6で支持する低耐荷力方式の曲線推進工法に使用される推進伝達インナーユニットであって、該推進伝達インナーユニット5は、2つのインナーユニット管が、管の端面中心に設けられた連結構造によって水平方向に回動可能に連結されて形成され、この連結構造を回動軸とする回動によって、2つのインナーユニット管の端面同士が当接可能な曲線用推進伝達インナーユニットを提供する。
(もっと読む)
テールクリアランス自動計測システムおよびテールクリアランス自動計測方法
【課題】掘削作業を中断させることなくテールクリアランスをリアルタイムで計測する。
【解決手段】撮像手段10と、複数の基準位置と撮像手段10との離間距離と、基準高さと、基準高さに相当するピクセル数とから得られる撮像手段10固有のピクセル比Pfとを記憶する記憶手段21と、撮像手段10とセグメント4との離間距離を取得する離間距離取得手段22と、セグメント4の読取基準点Rに対応するピクセル値を読み取るピクセル値読取手段23と、読取基準点Rに対応するピクセル値と、スキンプレート3上の計測基準点3aに対応するピクセル値と、離間距離取得手段22で得られた離間距離と、ピクセル比Pfとから、テールクリアランスを算出するクリアランス演算手段24とを備えた。
(もっと読む)
掘削位置測定具
【課題】掘削孔の形状に関わらず掘削位置を十分に効率的且つ高い精度で測定できる掘削位置測定具を提供すること。
【解決手段】本発明の掘削位置測定具40Aは、先端面10cにビット部材10dを備える掘削機10によって地中に掘削孔80を形成する際に使用されるものであって、所定の長さ及び形状を有し、一端が掘削機10に固定され、他端が坑口80aから外側に突出するように配置される被計測ロッド25と、この被計測ロッド25を収容する容器35と、この容器35中に収容されて被計測ロッド25を浮遊させる液体50と、を備える。
(もっと読む)
トンネル壁面変位の表示方法およびそのプログラム
【課題】トンネル壁面の変位量を二次元的かつ経時的に把握できるようにするとともに、日常的な施工管理のためのA計測を兼ねることによって、施工コストの削減、施工効率の向上等を図り、かつトンネル内の作業者の安全を確保する。
【解決手段】トンネル坑内に設置されたトータルステーション5により、複数の内空断面形状計測箇所を経時的に繰り返して計測を行い、この内空断面測定結果について、初期の内空断面測定値と、その後の内空断面計測値との差分から各計測時における変位量を算出し、モニタ上に、変位量を任意に設定した等量線毎に区分するとともに、各等量線の範囲毎に色分けした展開図によって表示するとともに、該展開図を同一モニタ上において経時的順序で切り換えて表示する。
(もっと読む)
掘進機
【課題】掘削経路中に障害物が存在するときに、掘進機の一部を掘削経路中に残し、残りを掘削開始地点まで戻すだけで、障害物を除去できること。
【解決手段】主固定要素の外筒12に回転自在に連結された外周側カッタヘッド18を備えた補助固定要素と、駆動部本体20とカッタ駆動軸22と油圧モータ24および内周側カッタヘッド26を含む移動要素とを備え、補助固定要素と移動要素を互いに分離可能に構成し、トンネル200中に障害物202が存在するときには、駆動部本体20とカッタ駆動軸22と油圧モータ24および内周側カッタヘッド26を含む移動要素を坑口側に引き戻し、外筒12内に、作業員204が移動可能な空間部114を形成することで、空間部114から空間部116を介して作業空間部200aに侵入した作業員204が障害物202を除去することができる。
(もっと読む)
掘進機の測量システム
【課題】掘進時における掘進機1の位置及び掘進方向を、高い精度で計測可能とする。
【解決手段】予め掘進機1内の複数箇所にターゲット31を設けると共に、掘進機1の後方の既設トンネル2内における所定箇所にディジタルカメラ32を設置し、掘進機1内をターゲット31と共に撮影し、その画像データを画像処理することによって、この画像におけるターゲットの位置座標を検出して初期値とする。次に、掘進機1による地中掘進開始後の所定のタイミングで、掘進距離計測手段によって掘進機1の掘進距離を計測すると共に、ディジタルカメラ32で掘進機1内を前記ターゲット31と共に撮影し、このときの画像から検出されたターゲット画像の間隔Pnが、掘進距離計測値と前記初期値とから求められる座標間隔Pmと等しければ、掘進機は直進しているものと判定し、Pn<Pmの場合は掘進方向が変化したものと判定し、かつPn及びPmから掘進機1の偏向角度θを求める。
(もっと読む)
管埋設方法及び管埋設システム
【課題】簡易な設備で地中に水平に管を敷設し、作業にかかる期間や費用を縮減することが可能な管埋設方法及び管埋設システムを提供すること。
【解決手段】先端に螺旋状の羽根112が設けられた鋼管110を水平に管軸を中心として回転させ、鋼管を地中に水平方向に貫入させることを特徴とする。また、鋼管の回転及び貫入は、鋼管の埋設開始位置に設けられた立て坑130に設置する回転装置140によって行われるとすることができる。また、立て坑で、鋼管の後端に別の管120を接続し、接続された管を地中に水平方向に貫入させるとすることができる。
(もっと読む)
目視兼用のポジションセンサ
【課題】 小口径管の埋設推進において、目視作業時におけるポジションセンサの問題点を解消する。
【解決手段】 ポジションセンサのターゲット裏面にバックライトを設け、内部照明方式とし、光源をLEDとする。
(もっと読む)
トンネル掘進工事用探査機
【課題】シールド機や推進機によるトンネルの掘進工事は、効率の良さから近年多く行われているが、掘進経路上に予期せぬ障害物が出現した場合には、障害物の大きさや性質などその実態を調査しなければならず、その際に障害物の鮮明な画像を得ることは容易ではなかった。
【構成】先端が隔壁によって閉塞されている細長い円筒状をなした本体の隔壁に高圧水噴射ノズル、地盤改良用薬液吐出口、泥水吸引口、カメラ用透明窓をそれぞれ設け、本体内に配設されている高圧水供給管、地盤改良用薬液供給管、泥水吸引管にそれぞれ接続すると共に、カメラ用透明窓を通して本体内のTVカメラで外部を撮影出来る様にした。
(もっと読む)
既設埋設管の回収工法
【課題】大きな引張力をかけずに埋設管を引き抜くことができ、必要な設備を小型化でき、しかも能率良く安全に一工程で作業を完了できるようにする。
【解決手段】回収対象である埋設管10の始端位置、終端位置にそれぞれ立坑である発進坑11、到達坑12を掘削し、埋設管の推進工法に用いる推進機20を発進坑11に設置し、推進機20にパイロット管30を取り付け、推進機20によってパイロット管30を埋設管10の外周面に沿って到達坑12まで到達するまで推進する。到達坑側に突き抜けたパイロット管30の先端部に滑材を吐出するノズル部を有するスクレーパ34を取り付け、このスクレーパ34から滑材を吐出しながらパイロット管30を引き抜き、埋設管10の外周面と地盤の間に滑材を注入する。しかる後、推進機20で埋設管10を引き抜き、これを回収する。
(もっと読む)
21 - 40 / 65
[ Back to top ]