
Fターム[2D129CA04]の内容
Fターム[2D129CA04]に分類される特許
1 - 20 / 56
掘削機及び掘削孔の形成方法
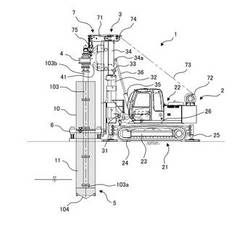
【課題】比較的簡素な構成で掘削孔の形成とケーシングの圧入とを一体的に行う。
【解決手段】掘削機1を構成する自走可能なベースマシン2は、その前方で、柱状のリーダ3を支持する。リーダ3に沿って昇降するスイベルヘッド4は、鉛直方向に地盤を回転掘削する回転掘削装置5の駆動源である。ケーシング圧入装置6はベースマシン2又はリーダ3の下端部に着脱可能に取り付けられており、ケーシング10をその外方から挟持して回転させつつ地盤に圧入する。スイベルヘッド4の回転軸と、回転掘削装置5の回転軸と、ケーシング圧入装置6内のケーシング10の中央軸とは、互いに略一致する。ケーシング圧入装置6は回転掘削装置5の掘進速度に同調させた圧入速度でケーシング10を地盤に圧入し得る。回転掘削装置5の回転掘削により形成される掘削孔11は、その孔壁が、ケーシング圧入装置6により圧入されるケーシング10によって覆われて防護される。
(もっと読む)
作業機の制御装置

【課題】ブームやアームの長さに依存することなく、作業用アタッチメントを鉛直に昇降させることができる作業機の制御装置を提供する。
【解決手段】上部旋回体の前方において鉛直方向に対する掘削ロッドの傾斜角度が所定の閾値を超えた場合には、アクチュエータ駆動制御手段に基づいてアームを引く制御が実行される(ステップ1〜2)。また、上部旋回体の後方において鉛直方向に対する掘削ロッドの傾斜角度が所定の閾値を超えた場合には、アクチュエータ駆動制御手段に基づいてアームを押す制御が実行される(ステップ3〜4)。
(もっと読む)
海底着座型ボーリングマシン用のロッド搬送装置
【課題】海底着座型ボーリングマシンの大型化を抑制する。
【解決手段】ロッドを縦向きに収容する複数のマガジン4a,4bと、当該マガジンに収容されているロッドの抜取り及び戻し作業を行うロッドハンドリング装置を備え、前記マガジンは、それぞれ、少なくとも一つのガイドフレーム12と、該ガイドフレーム内を間欠的に回転する無端体と、該無端体の長手方向に所定の間隔で設けたロッド保持具14を備え、前記ロッドハンドリング装置は、スイングアーム27a、27bに設けられ前記マガジンとロッド受渡し位置の間をスイングするスイングジョー23と、前記ロッド受渡し場所より前方に位置するロッドホルダと待機位置の間を往復するツールジョー25を備えた。
(もっと読む)
調節範囲を決定するコンピュータユニットを有する建設機械及びその建設機械を動作させる方法
【課題】傾倒に対する安全度に関わる信頼性が高く、作業半径が大きくい建設機械を提供する。
【解決手段】搬送ユニット10と、搬送ユニット10に対する調節が可能な駆動ユニット18と、建設機械1の状態データを検出する、少なくとも一つの検出手段51〜64と、コンピュータユニット23とを有し、建設機械1の傾倒に対する所定の安全度で駆動ユニット18を調節できる、駆動ユニット18の調節範囲の少なくとも一つを、検出された状態データに基づいて、コンピュータユニット23を利用して決定する。
(もっと読む)
掘削孔用装置
【課題】掘削孔用装置に搭載された慣性センサからの慣性データ信号における不要な振動に対して減衰効果を与える電子回路を提供する。
【解決手段】指向性装置22はゾンデの形状の円筒ハウジング32を有する。従来型のバッテリーパック43と指向性装置34とがハウジング32の内部に搭載されている。三つの減衰回路36、ADC38、信号処理回路40、MWD遠隔測定ユニット42、三つの慣性センサ44、46、48、及び三つの磁力計44’、46’、48’などの部品が指向性装置の内部に搭載されている。慣性センサのそれぞれに一つが対応するよう減衰回路36がある。指向性装置が掘削による振動をうけると、加速度計からの出力電流は、その上に重ねられた周期的又は非周期的なAC様の波形を有する。しかし減衰回路のコンデンサのリアクタンスは周波数と共に増加し、低域フィルターは出力電流中のそのようなAC周波数成分を地面へと短絡する。
(もっと読む)
削岩リグ、岩盤穿孔方法および削岩リグの制御システム
本発明は、削岩リグ、削岩方法、および削岩リグの制御システムに関する。削岩リグ(1)は、穿孔穴(21)を穿孔穴パターンとして穿孔する穿孔ユニット(6)を含む。穿孔ユニットの位置が決められ、制御装置(16)は、与えられた目標位置に基づいて操作部材(19)を使って、穿孔ユニットの位置に影響を与えるアクチュエータ(19)を制御するように構成されている。操作部材のそれぞれ個々の操作方向は、1つの座標もしくは方向角についてのみ目標位置に影響を与えるように構成されている。さらに、操作部材の操作方向は穿孔ユニットの運動方向に対して直感的であるように構成されている。 (もっと読む)
位置決め情報の表示方法、ユーザインターフェースおよび削岩リグ
本発明は、穿孔穴を扇形状パターンとして穿孔するときに削岩リグの穿孔ユニットの位置決め情報を表示する方法に関する。さらに本発明は、ユーザインターフェースおよび削岩リグに関する。ディスプレイ装置(25)によって、穿孔穴の情報および扇形部平面に対する穿孔ユニット(6)の位置および方向を表示する。ディスプレイ装置は、少なくとも2つの分割画面(31a、31b)を有する表示画面(30)を操作者に示し、これに基づいて操作者は、位置決めに関する全自由度の情報を同時に得ることができる。操作者は、制御装置(16)に接続されたディスプレイ装置および少なくとも1つの操作部材(15)を含むユーザインターフェース部(29)により位置決めを制御する。 (もっと読む)
削孔管の先端位置測定方法および先端位置測定システム
【課題】小径の削孔管や地上構造物がある場所などであっても正確かつ容易にその先端位置の測定が可能な削孔管の先端位置測定方法および先端位置測定システムの提供。
【解決手段】地中を削孔しながら推進する削孔管Cの先端位置を測定する方法であって、前記削孔管Cの推進方向後端側に受信器30を設けると共に、前記削孔管Cの先端が推進する地中の所定の位置に複数の発信器20を埋設しておき、前記各発信器20から前記削孔管Cの先端方向に測定用音波を発信して当該削孔管Cを伝播する各測定用音波を前記受信器30によって受信した後、受信した各測定用音波を解析して前記削孔管Cの先端位置を測定する。これによって、小径の削孔管や地上構造物がある場所などであっても正確かつ容易にその先端位置を測定できる。
(もっと読む)
海底地下探査掘削機
【課題】海底に着底して、小さい掘削機を用いて細いロッドで掘って、地底探査する為の機械を提供する。
【解決手段】大きなプラットホーム〔搾油リグ〕を建てて海上から、太いロッドで掘下げ、かつ掘削機は小さいものを使い、海底に潜水して掘る為に、ロッドのグリップ方法をブルドーザのキャタビラー形で掘削機に適用すると共に、海底で長期作業する為に海底の海水圧に耐え、燃料、酸素を補給が行えるようにしたデーゼルエンジン127を使用する。
(もっと読む)
可動機械用のテザー追跡システムおよび同方法
可動機械(12)用のテザー追跡システム(28)が開示される。テザー追跡システムは、可動機械に配置されて、可動機械が作業現場を移動して回るときに、可動機械から固定供給源(14)まで延びるテザー(16)を選択的に取り出し、巻き取るスプール(26)を有することができる。テザー追跡システムはまた、スプールパラメータを示す第1の信号を生成する、スプールに付属する少なくとも1つのセンサ(32)と、可動機械の位置を示す第2の信号を生成する、可動機械に付属する位置特定システム(33)と、少なくとも1つのセンサおよび位置特定システムと通信するコントローラ(34)とを有することができる。コントローラは、第1および第2の信号に基づいて、テザー回避ゾーン(24)を定めるように構成することができる。 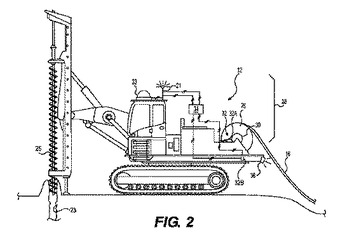 (もっと読む)
(もっと読む)
地盤施工機およびその工具駆動制御方法
【課題】複数の変速段から最適な変速段を自動的に選択して工具を安定的に回転駆動することのできる地盤施工機およびその工具駆動制御方法を提供する。
【解決手段】回転駆動される工具と、可変容量の油圧モータを複数備えた駆動部8と、油圧モータに供給される流体の供給側と排出側の圧力差を検出するための検出器86,87と、駆動部の複数の変速段のいずれかを自動的に選択して駆動部を駆動制御する駆動制御部80とを有し、駆動制御部は、圧力差によって変速段の選択を行うものであり、変速段移行のための圧力差の基準値と基準時間とがそれぞれの変速段移行に対して設定されており、圧力差が変速段を低速側に移行するための基準値以上である状態が基準時間以上連続した場合に、変速段を低速側に移行するものであり、圧力差が変速段を高速側に移行するための基準値以下である状態が基準時間以上連続した場合に、変速段を高速側に移行するものである。
(もっと読む)
拡大翼を備えた掘削装置及び掘削方法
【課題】 拡大穴を掘削するときの掘削回数を自動的に設定する。
【解決手段】
下端に掘削刃6aと拡大翼7を備えた掘削ロッド5と、掘削ロッド5を駆動するオーガ駆動装置3と、前記掘削刃3aによる拡大穴掘削区域の掘削時における前記駆動手段の電動機4の負荷電流を測定する手段と、を有し、前記測定した電流値に基づき掘削刃6aの掘削力を求め、それに所定の低減率を付して拡大翼7による掘削力を算出し、前記拡大翼7の掘削力に基づき拡大穴の掘削回数を算出する。 前記掘削回数に基づき前記拡大翼7の拡開量を算出し、前記拡大翼7の拡開量に基づき前記拡大翼を拡開制御する。
(もっと読む)
掘削装置
【課題】機構がシンプルで安価であり、更に軽量でありながら単体で安定した掘削性能を発揮する、新規且つ有用な掘削装置を提供する。
【解決手段】ドリルビットが回転することによって生じる回転反力を相殺するために、ドリルビットの進行方向の反対側に、ドリルビットの回転方向とは逆方向に回転駆動される螺旋羽根を設けた。ドリルビットを回転駆動するドリルモータと、螺旋羽根を回転駆動する螺旋モータは、共通の筐体であるケースに収められ、このケースを通じて回転反力同士が相殺される。
(もっと読む)
削孔装置
【課題】削孔機を自動的に移動制御して所定位置に次々と多数の孔を自動穿孔でき、高速・大量施工の高能率削孔ができると共に、小型化・小スペース化が図れ、吊り下げ搬送して壁面に沿設固定できる構成であるため、たとえ削孔作業を行う壁面と足場とが狭隘でも使用可能な画期的な削孔装置を提供すること。
【解決手段】X方向レール2に設けてスライド制御するX方向スライダー3に、削孔機5を設けた削孔ブロック6を設けて削孔装置本体7を構成し、この削孔装置本体7を吊り下げ搬送し前記削孔面1に固定する壁面固定部8を前記削孔装置本体7に設け、この削孔装置本体7の前記削孔ブロック6を折り畳み回動自在に設けて、Z方向の突出長が短くなるように構成した削孔装置。
(もっと読む)
削岩リグ制御システム及び制御方法
削岩機の送りモータ(2)、打撃装置(4)及び回転モータ(3)である消費体への圧力流体供給を制御する油圧流体制御システム(1)であって、前記システムが、各消費体用の調整バルブ(6,7,8)を有し、調整バルブと各消費体との間に流体導管が設けられ、前記システムが、流体導管の少なくとも一つの接続及び遮断用の少なくとも一つの電気制御式補助バルブ(14)を備えた電子制御式補助制御ユニット(11)と、削岩機の少なくとも一つの部材に関する有効流体パラメータ値を感知し、かつ、センサ信号をセンサ入力信号is値として補助制御ユニットに送るための少なくとも一つのセンサと、前記センサ入力信号is値を受信するための少なくとも一つのパラメータセンサ入力信号入力部(S1−S5,I1−I5)と、各補助バルブの信号制御用の少なくとも一つの制御信号出力部(V1−V6)とを有する処理装置(12)とを備え、前記処理装置(12)が、前記センサ入力信号is値をパラメータshould値と比較し、比較結果に対する応答として少なくとも一つの補助バルブに制御信号を出力し、前記少なくとも一つの補助バルブに関する流体導管内の流体フローを調整するように構成されている。本発明は、削岩リグ及び方法にも関する。 (もっと読む)
作業機械
【課題】敷鉄板を敷設した作業現場における作業機械の安定性を、接地板を敷鉄板に強く押し付けなくても十分に確保することができるジャッキ装置を備えた作業機械を提供する。
【解決手段】下部走行体12の上部に上部旋回体14を旋回可能に設け、上部旋回体14の前部にリーダ17を起伏可能に設けるとともに、上部旋回体12の前方に一対のフロントジャッキ装置20を、後方に一対のアウトリガジャッキ装置21をそれぞれ備え、敷鉄板上で作業を行う杭打機10において、フロントジャッキ装置20及びアウトリガジャッキ装置21の接地板20d,21dに電磁石22をそれぞれ取り付ける。
(もっと読む)
インバータ制御駆動装置およびそれを用いた掘削機
【課題】複数の汎用モータの各インバータの出力周波数を同じにしてもモータのすべりや駆動装置(ギア)のバックラッシュにより、汎用モータのモータ巻線に逆起電力が発生する。
【解決手段】2個の汎用モータ5a、5bを制御するインバータ8a、8bを、コンバータ部14a、14bと、該コンバータ部14a、14bからの出力電圧を平滑するコンデンサ部15a、15bと、該コンデンサ部15a、15bにより平滑された直流電圧を三相交流に変換する出力ブリッジ部16a、16bと、コンバータ部14a、14bとコンデンサ部15a、15bの間に直列接続された突入電流抑制抵抗部18a、18bと、該突入電流抑制抵抗部18a、18bに並列接続された第一スイッチ19a、19bと、を有し、第一スイッチ19a、19bは、コンデンサ部15a、15bのコンデンサ電圧が第一規定電圧に達すればONに切り替わる。
(もっと読む)
削岩リグにおける方法および装置
削岩リグ(1)に削岩機(6)が設けられ、削岩機は、衝撃装置(4)と、送り装置(9)と、削岩用ドリルビット(8)を端部に備えたツール(7)とを有する。衝撃装置は応力波をツールに対して発生し、ここからさらに、被掘削岩盤に対して発生するよう配設されている。掘削中、ツールに対して発生した圧縮応力波(σi)の少なくとも一部は、岩盤から反射されて応力波(σr)としてツールへ戻る。本方法では、岩盤から反射されてツールへ戻る応力波(σr)の運動量(Pr)を求め、衝撃装置の作動および/または送り装置の作動を運動量に基づいて調節する。 (もっと読む)
弁の不感領域判別方法
本発明は、削岩装置のアクチュエータの制御に用いる比例制御弁(8)の不感領域判別方法であって、制御弁(8)を電気的Pコントローラ(12)で制御し、アクチュエータの動きを表す座標系におけるアクチュエータの位置を別個の位置検出器で測定することを含むものである。不感領域は、制御弁(8)のPコントローラと差分値との積によって判別する。 (もっと読む)
削岩装置における空気流監視構造及び空気流監視方法
本発明は、ドリルビット(20)の表面にある少なくとも一つのフラッシング孔(23)に空気流(34)を供給するために用いられる容積形圧縮機(32)の上流に吸気弁(31)を配置した削岩装置(10)内の構造に関する。削岩装置(10)は、容積形圧縮機の下流にある空気流流路(34)のシステム圧力を調整するために設けられたレギュレータ(35)と、ドリルビットの表面にある少なくとも一つのフラッシング孔(23)を通る空気の流れを検知する検知手段とを、さらに備えている。前記検知手段は、空気レギュレータ(36)と吸気弁(31)との間に配置された圧力センサ(37)を備え、低下したシステム圧力を測定するように構成されている。 (もっと読む)
1 - 20 / 56
[ Back to top ]