
Fターム[2F051AB06]の内容
特定の目的に適した力の測定 (5,882) | 力の検出手段 (2,017) | 電気的 (1,162)
Fターム[2F051AB06]の下位に属するFターム
感圧導電体 (148)
圧電素子 (104)
歪ゲージ、ロードセル (605)
Fターム[2F051AB06]に分類される特許
41 - 60 / 305
トルク異常検知装置および輸送機器
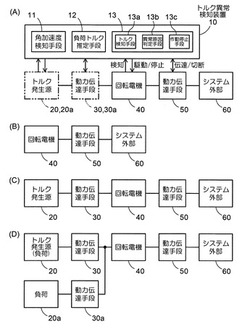
【課題】動力源に掛かる負荷トルクの異常を検知可能なトルク異常検知装置および輸送機器を提供することである。
【解決手段】トルク異常検知装置10は、動力源に掛かる負荷トルクを推定する負荷トルク推定手段12と、動力伝達手段30,30a,50,55によってシステム外部60との動力の伝達を切断する状態で、負荷トルク推定手段12によって推定される負荷トルクに基づいて動力源に掛かる負荷トルクの異常を検知する負荷トルク異常検知手段13とを有する。システム外部60との間で動力の伝達が切断されるので、システム外部60の変動や変化等による影響を受けない。よって、負荷トルクを精度良く推定でき、負荷トルク異常検知手段13は何らかの故障等が起きたことを的確に検知できる。
(もっと読む)
評価ベンチのブレーキトルク算出方法

【課題】トランスアクスルに備わるモータジェネレータが過回転になることなく任意の時間で停止させるためのダイナモのブレーキトルクを算出することができる評価ベンチのブレーキトルク算出方法を提供すること。
【解決手段】プラネタリギヤ25を介して接続されたモータジェネレータMG1,MG2を備えるトランスアクスル20の入力側及び出力側にそれぞれダイナモ12,14を接続し、各ダイナモ12,14によりモータジェネレータMG,MG2を回転させて性能評価を行う評価ベンチ10を停止させる際のブレーキトルクk1,k2を算出する方法において、プラネタリギヤ25に関する運動方程式に基づき、各ブレーキトルクk1,k2に関する伝達関数を導出して、ダイナモ12,14の各回転数と停止時間t1とから、ダイナモ12,14及びモータジェネレータMG1,MG2を停止時間t1で同時に停止させるための各ブレーキトルクk1,k2を算出する。
(もっと読む)
触覚センサ、把持装置、及びアクチュエータシステム
【課題】構造が簡素な触覚センサ等を提供する。
【解決手段】触覚センサ70は、第1電極73aと第3電極73cとの間の第1静電容量と、第2電極73bと第3電極73cとの間の第2静電容量と、に基づいて、受圧部72に加わった押付力(X軸方向の力)又は押付力によって生じる把持力(Y軸方向の力)を検出する。これにより、3つの電極のみで、押付力、把持力等の力を検出することが可能になる。そのため、構造が簡素な触覚センサ70、この触覚センサ70を備えた把持装置及びアクチュエータシステムを提供することができる。
(もっと読む)
変形センサ、キャリブレーション方法、キャリブレーション用プログラム
【課題】センサ体の歪みによる誤差を小さくすることが可能な変形センサ、キャリブレーション方法、キャリブレーション用プログラムを提供することを課題とする。
【解決手段】変形センサ1は、弾性変形するセンサ体22と、センサ体22の変形量に対応する検出値を算出する制御部と、を備える変形センサ1であって、制御部は、時系列的に前後する、早期の検出時T8の検出値F30と、遅期の検出時T9の検出値F23と、を比較する検出値比較部と、センサ体22が弾性力を蓄積しながら変形する際の検出値F23の変化方向を正方向として、二つの検出値の比較の結果、遅期の検出時T9の検出値F23が、早期の検出時T8の検出値F30未満である場合、早期の検出時のセンサ体22の歪みによる誤差を小さくするために、遅期の検出時T9の検出値F23を補正する補正部と、を有する。
(もっと読む)
電気機械装置の特性測定装置及び測定方法
【課題】電気機械装置のトルクやその他の特性を簡便に測定する。
【解決手段】電動モーターの特性測定装置であって、予め特性が既知である負荷モーターと、前記負荷モーターと被測定モーターのローターとを接続するカップリングと、前記被測定モーターに負荷トルクを与えるために、前記負荷モーターの動作を制御する負荷モーター制御部と、前記負荷モーターの回転数と、前記負荷モーターに流れる電流とから、前記負荷モーターが前記被測定モーターに与える負荷トルクを算出する負荷トルク算出部と、前記負荷トルクが前記負荷モーターに与えられたときの前記被測定モーターの電流と回転数とを測定する測定部と、前記負荷トルクと被測定モーターの電流と回転数とを用いて前記被測定モーターのトルク−回転数特性と、トルク−電流特性と、を取得する特性取得部と、を備える。
(もっと読む)
測定装置、及び測定方法
【課題】ロードセル等の測定器具を設けることなく、測定対象に与える荷重を測定できる測定装置を提供する。
【解決手段】測定装置は、リニアモータと、リニアモータを駆動してリニアモータが有する可動子を移動させることにより測定対象に荷重を与える駆動部と、前記可動子を相対移動させる際に前記リニアモータに流れる電流値と、前記リニアモータの推力定数とを乗じて前記可動子が前記測定対象に与える荷重を算出する荷重測定部とを具備している。
(もっと読む)
タッチパネル装置
【課題】高価な水圧センサを用いることなく、タッチパネルに加わる圧力によって簡易的に水圧等を測定可能とする。
【解決手段】表示部11は、装置の外装を形成する筐体部20の表面に備えられ、押圧された範囲を検出するタッチパネル操作部113、タッチパネル操作部113に重ねて配置され各種情報を表示する表示素子部111、およびタッチパネル操作部113と表示素子部111を覆い外部からの圧力に対して撓むことによりタッチパネル操作部113の所定範囲を押圧する保護パネル115を備える。判定部101はタッチパネル操作部113が保護パネル115により押圧されることにより所定範囲の押圧が検出された場合、検出された押圧範囲に応じて保護パネル115に加わった圧力を判定する。
(もっと読む)
検出装置、電子機器及びロボット
【課題】裏面に錐状突起が略均一に配置された受圧シートを用い、その突起の変形量から外圧分布を測定する構成を備えた検出装置が知られているが、この構成では測定面にかかる外圧の面内方向の力(すべり力)を測定することができないという課題があった。
【解決手段】基板の第1面に複数の電極を配置してなる検出装置であって、前記第1面は波型形状を備えており、かつ前記第1面を覆う、外圧の印加により電気的特性が変化し、外圧の開放により元の状態に戻る感圧層を備えた。感圧層に斜め方向から外圧が印加された場合、基板の第1面が波型形状を備えていることから、横方向の力は第1面の波型形状の斜面に与えられる。そのため、電極の法線方向に近い角度で与えられる。そのため、波型形状を備えていない場合と比べ、外圧に対して感度が上げることができる。
(もっと読む)
力覚センサ
【課題】多数のセンサを必要とすることなく、センサのための配線簡単化も容易である力覚センサを実現する。
【解決手段】第1の本体部A1および第2の本体部A2と中間体Bとの間に弾性連結部9a〜9c、10a〜10cを設ける。これにより、本体部A1、A2を中間体Bを介して相対移動可能に連結し、第2の本体部A2に作用する外力の6方向の成分を、センサ基板13に搭載された検出電極14a〜14c、15a〜15cによって検出する。本体部A2に支持されたセンサ基板13のみに検出電極が設けられるため、中間体Bや本体部A1にまたがって複雑な配線を施す必要がない。
(もっと読む)
検出装置、電子機器及びロボット
【課題】耐久性に優れ外圧の方向と大きさを高い精度で検出することが可能な検出装置、
電子機器及びロボットを提供することを目的とする。
【解決手段】基準点Pの周りに複数配置された圧力センサー12を有する第1基板10と
、基準点Pと重なる位置に略中心が位置するとともに外圧によって弾性変形する略半球状
の弾性体突起21と、弾性体突起21を隔てて第1基板10の反対側に設けられた第2基
板30と、を備える。
(もっと読む)
圧力検出装置、電子機器
【課題】簡素な構成で外圧の3次元ベクトルを精度よく検出可能な圧力検出装置、これを
備えた電子機器を提供すること。
【解決手段】圧力検出装置10は、一対の基板1,2と、一対の基板1,2間に設けられ
ると共に、一対の基板1,2のうち一方の基板2の外周に沿って配置された複数の圧力検
出部15と、を備え、圧力検出部15は、一対の基板1,2のうち他方の基板1に設けら
れた圧力センサーと、先端部が圧力センサーに当接するように配置された弾性体突起とか
らなり、一方の基板2に加わる外圧の方向と大きさを複数の圧力検出部15により検出す
る。
(もっと読む)
感圧センサアレイの制御回路及び関連する方法
【課題】より高い精度及び/又はより高速の走査速度を提供することができる回路及び関連する方法を提供する。
【解決手段】圧力又は力応答センサアレイを走査する制御回路が開示される。圧力又は力応答センサ素子のアレイで形成される圧力センサ又は力センサを使用して、負荷印加に応答して圧力測定又は力測定を得ることができる。制御回路は、センサ素子からの信号をサンプリングして、センサアレイの1つ又は複数のセンサ素子での圧力又は力を検出することができる。本明細書における回路は、比較的より高速の走査速度を提供することができる。ユーザは、センサアレイのセンサ素子の走査対象となる1つ又は複数のサブセットを定義することができる。センサ特性を調整する様々な方法及び関連回路も開示される。
(もっと読む)
衝撃荷重測定システム、衝撃荷重測定方法、コンピュータプログラム、及びコンピュータ読み取り可能な記録媒体
【課題】高速度カメラにより撮像した画像から前記荷重測定装置の加速度データを算出することにより、衝撃荷重を正確に測定することができる衝撃荷重測定システム、衝撃荷重測定方法、コンピュータプログラム、及びコンピュータ読み取り可能な記録媒体を提供する。
【解決手段】 衝突体が試験体に衝突した際の衝撃荷重を測定するシステムであって、前記衝突体に設置される荷重測定装置と、該衝突体の挙動を撮影する高速度カメラと、該高速度カメラにより撮像した画像から前記荷重測定装置の加速度データを算出する加速度評価装置と、前記荷重測定装置により測定された荷重データを抽出する荷重評価装置と、前記加速度データに基づいて前記荷重データを補正する補正装置と、を有することを特徴とする、衝撃荷重測定システム、衝撃荷重測定方法、コンピュータプログラム、及びコンピュータ読み取り可能な記録媒体。
(もっと読む)
塑性締付け用ボルト
【課題】塑性域締めにおいて高価な器具や装置を使用せずに適正軸力で被締結物を締結でき、そのボルトが塑性変形前のものか塑性変形後のものかを簡単に選別できる塑性締付け用ボルトを提供する。
【解決手段】ボルト4の初期締付の際、前記ボルト4の軸部4Aが塑性変形するまで締め付ける塑性締付用ボルトにおいて、前記ボルト頭部4Bから前記ボルトの軸部4Aまで貫通する検知部埋め込み用の穴5と、前記ボルト軸部4Aが軸方向に塑性変形したことを検知する検知部1とを備え、前記検知部1は、予め前記ボルト4に軸方向の張力をかけた状態で前記ボルト4の前記穴5の中に設置された。
(もっと読む)
検出装置、電子機器、及びロボット
【課題】外圧の方向と大きさとを高い精度で検出することが可能な検出装置、電子機器及びロボットを提供する。
【解決手段】基準点Pの周りに複数配置された圧力センサー12を有する第1基板10と、基準点Pと重なる位置に重心が位置するとともに外圧によって先端部が第1基板10に当接した状態で弾性変形する単位突起24が形成された第2基板20と、を備え、単位突起24が、硬度の高い弾性体突起22と、硬度の低い弾性体層23と、からなる。
(もっと読む)
シートおよび車椅子
【課題】着座者の体圧分布の検出精度が高く、当該体圧分布を基に着座者の姿勢を判別可能であり、姿勢の判別結果に応じて警報を発生可能なシートおよび車椅子を提供することを課題とする。
【解決手段】シート93は、体圧センサユニット10と警報装置48とを備える。体圧センサユニット10は、体圧センサ5と制御部4とを備える。体圧センサ5は、体圧用センサ薄膜51と体圧用電極01X〜16X、01Y〜16Yと体圧用検出部A0101〜A1616とを有する。体圧センサ5は、着座者Mの体圧を電気量として検出可能である。制御部4は、当該電気量から着座者Mの体圧分布を演算し、体圧分布から着座者Mの姿勢を判別する。
(もっと読む)
静電容量型センサ
【課題】誘電層がへたりにくく、広い荷重領域に亘って荷重を検出可能な静電容量型センサを提供することを課題とする。
【解決手段】静電容量型センサ1は、表側編地30と、裏側編地31と、表側編地30と裏側編地31とを表裏方向に連結すると共に可撓性を有する連結糸32と、を有する立体編物製の誘電層3と、表側編地30の表側に配置される表側電極1X〜8Xと、裏側編地31の裏側に配置される裏側電極1Y〜8Yと、表側または裏側から見て表側電極1X〜8Xと裏側電極1Y〜8Yとが重なる部分に配置される検出部A11〜A88と、を備える。
(もっと読む)
入力物理量推定方法、推定装置並びに推定プログラム
【課題】系への入力と系からの出力とがどちらも多変数(多元・多次元の物理量)である場合に系からの出力に基づいて前記系への入力を推定することができるようにする。
【解決手段】第一近似係数を算定する処理と、推定入力物理量を算出する処理と、推定入力物理量の有効判定を行う処理と、推定入力物理量の決定を行う処理と、推定出力物理量を算出する処理と、残差を算出する処理と、残差と増減表との比較を行う処理と、次推定入力物理量成分を決定する処理と、打ち切り判定を行う処理とを有するようにした。
(もっと読む)
非単結晶トランジスタ集積回路
【課題】更に多機能化した非単結晶トランジスタ集積回路を提供する。
【解決手段】非単結晶トランジスタ集積回路は、第1の高分子フィルム11と、高分子フィルム11に設けられた共通電極12と、共通電極12に設けられた誘電体13と、誘電体13に設けられた第2の高分子フィルム14と、第2の高分子フィルム14に設けられ、圧力が加えられた際に、誘電体13の厚さの変化量を容量の変化として読み出す圧力センサ15と、第2の高分子フィルム14に設けられ、圧力センサ15を読み出すための非単結晶トランジスタ16とを具えることを特徴とする。
(もっと読む)
検出装置、電子機器及びロボット
【課題】外圧の方向と大きさを高い精度で検出することが可能な検出装置、電子機器及びロボットを提供する。
【解決手段】基準点Pの周りに複数配置された第1容量電極12、を有する第1基板10と、第1容量電極12を挟んで第1基板10と対向配置された第2基板20と、第1基板10と第2基板20との間において誘電体を挟んで第1容量電極12と対向配置された第2容量電極22と、基準点Pと重なる位置に重心が位置するとともに外圧によって先端部が第2基板20に当接した状態で弾性変形する弾性体突起32、が形成された第3基板30と、を備える。
(もっと読む)
41 - 60 / 305
[ Back to top ]