
Fターム[2F063BA08]の内容
電気磁気的手段を用いた長さ、角度等の測定 (19,512) | 測定対象物の種類 (1,844) | ステアリングホイール、ハンドル (281)
Fターム[2F063BA08]に分類される特許
41 - 60 / 281
回転角度検出装置およびステアリング装置
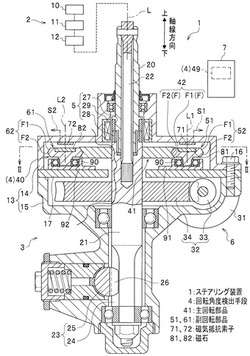
【課題】回転角度検出装置において、回転部品の回転角度を検出するために互いに連動する主回転部品および副回転部品から構成される回転部品群の設計の自由度を大きくする。
【解決手段】回転角度検出装置4は、回転中心線Lを中心にステアリング装置1の出力軸21と一体に回転する主回転部品41と、所定回転比で主回転部品41と連動して回転する第1,第2副回転部品51,61と、第1,第2副回転部品51,61の第1,第2回転角度θ1,θ2に応じた第1,第2検出信号S1,S2を出力する第1,第2磁気抵抗素子71,72と、第1,第2検出信号S1,S2に基づいて操舵角θを検出する回転角度検出手段49とを備える。主回転部品41と第1,第2副回転部品51,61との間での回転の伝達は、主回転部品41および第1,第2副回転部品51,61の接触面42,52;42,62同士の摩擦により行われる。
(もっと読む)
回転角度検出装置

【課題】主に自動車のステアリングの回転角度検出等に用いられる回転角度検出装置に関し、小音化が図れ、確実な回転角度の検出が可能なものを提供することを目的とする。
【解決手段】上面中央に磁石5Aが装着された第一の検出歯車12の、下面中央に磁性体19を設け、第一の検出歯車12を下方へ付勢することによって、第一の検出歯車12の上下方向のがたつきがなくなるため、多少の振動や衝撃が加わっても衝突音の発生を防ぐことができ、小音化が図れ、確実な回転角度の検出が可能な回転角度検出装置を得ることができる。
(もっと読む)
回転角度検出装置及びこれを使用した電動パワーステアリング装置
【課題】低消費電力を確保しながら信頼性を向上させることができる回転角度検出装置及びこれを使用した電動パワーステアリング装置を提供する。
【解決手段】励磁コイルと検出コイルとを備えたレゾルバと、該レゾルバの励磁コイルに正弦波状励磁信号を出力し、前記検出コイルから出力される検出信号を入力して回転角度位置を演算する第1の回転角度位置演算部と、前記レゾルバの励磁コイルにパルス励磁信号を出力し、前記検出コイルから出力される検出信号を入力して回転角度位置を演算する第2の回転角度位置演算部と、前記第1の回転角度位置演算部及び前記第2の回転角度位置演算部と前記レゾルバの励磁コイル及び検出コイルとの間を切り換える信号切換部とを備え、前記第2の回転角度位置演算部は、前記各検出コイルからの検出信号の入力側と前記信号切換部との間に、前記検出コイル毎に個別の共振回路を構成する共振素子が介挿されている。
(もっと読む)
アングルセンサ及び電動パワーステアリング装置
【課題】イグニション・オフ時においてもステアリングホイールの操舵角度に関連する情報を取得し続けることができるアングルセンサ及びこれを備えた電動パワーステアリング装置を提供する。
【解決手段】ステアリングシャフト2の回転角度に関連する情報を取得する角度情報取得手段(モータ回転角度センサ11)を備え、外部から供給される電力により作動するとともに外部から制御指令が送出された場合に角度情報取得手段で取得した情報を外部に出力するアングルセンサ10であって、制御指令が解除された場合に角度情報取得手段で取得した情報を記憶する記憶手段(集積回路12)を備える。電動パワーステアリング装置1は、アングルセンサ10で取得した情報に基づいてステアリングホイール3の操舵角度を算出するコントロールユニット20を備える。
(もっと読む)
アングルセンサ及び電動パワーステアリング装置
【課題】長い待機時間や複雑な調整作業を要することなくステアリングシャフトやモータの回転角度を検出することができるアングルセンサ及びこれを備えた電動パワーステアリング装置を提供する。
【解決手段】ステアリングシャフト2の回転角度に関連する情報を取得する角度情報取得手段(モータ回転角度センサ11)を備え、外部から指令が送出された場合に角度情報取得手段で情報を取得するアングルセンサ10である。角度情報取得手段は、MR素子又はHall素子を有し、外部から間欠的に供給される電力による作動する。電動パワーステアリング装置1は、アングルセンサ10で取得した情報に基づいてステアリングホイール3の操舵角度を算出するコントロールユニット20を備える。
(もっと読む)
アングルセンサ及び電動パワーステアリング装置
【課題】消費電力を節減しながら必要なタイミングで作動してシャフトの回転角度を検出することができるアングルセンサ及びこれを備えた電動パワーステアリング装置を提供する。
【解決手段】ステアリングシャフト2の回転角度に関連する情報を取得する角度情報取得手段(モータ回転角度センサ11)を備え、外部から指令が送出された場合に角度情報取得手段で情報を取得するアングルセンサ10である。角度情報取得手段は、外部から間欠的に供給される電力により作動するとともに、ステアリングシャフト2の回転角速度に応じて作動時間が変化するように構成される。電動パワーステアリング装置1は、アングルセンサ10で取得した情報に基づいてステアリングホイール3の操舵角度を算出するコントロールユニット20を備える。
(もっと読む)
回転角検出装置、および、これを用いた電動パワーステアリング装置
【課題】中間値固着異常が生じていることを適切に判断することができる回転角検出装置、および、これを用いた電動パワーステアリング装置を提供する。
【解決手段】回転角検出装置10の制御部50は、ハーフブリッジ14〜17から出力される出力信号Vx1、Vx2、Vy1、Vy2を、ハーフブリッジ14〜17毎に取得する。制御部50は、取得された出力信号Vx1、Vx2、Vy1、Vy2に基づき、被検出部87の回転角度θを算出する。制御部50は、取得された出力信号Vx1、Vx2、Vy1、Vy2に基づいて算出される演算値C1またはC4に基づき、演算値C1またはC4の算出に用いた出力信号Vx1、Vx2、Vy1、Vy2に中間値固着異常が生じているか否かを判断する。これにより、中間値固着異常が生じているか否かを適切に判断することができる。
(もっと読む)
回転角度検出装置
【課題】誤差要因の影響を抑制し、回転角度の検出精度をより安定的に維持することができる回転角度検出装置を提供する。
【解決手段】最終的な絶対回転角度θrは、第1の仮絶対回転角度θabの理想値である。このため、絶対回転角度θrと第1の仮絶対回転角度θabとの差の値である誤差値Δθabは、第1及び第2の従動歯車の回転角度α,βの相対誤差でもある。そこで、誤差値Δθabに基づき算出される補正値εを第1の仮絶対回転角度θabに加味し、これを使用して周期数iを演算するようにした。補正後の第1の仮絶対回転角度θabは前記相対誤差の影響が吸収されたものとなる。すなわち、第1及び第2の従動歯車の回転角度α,βの相対誤差が許容範囲を超える場合であれ、当該相対誤差が存在しない状態に近似した状態で周期数iが演算される。
(もっと読む)
磁気検出素子及びこれを用いた回転角度検出装置
【課題】自動車のステアリングの回転角度検出等に用いられる磁気検出素子及びこれを用いた回転角度検出装置に関し、温度変化等による誤差がなく、高精度で確実な回転角度の検出が可能なものを提供することを目的とする。
【解決手段】略矩形状に配列された四つの磁気抵抗22A〜22Dの、対向する二つずつの磁気抵抗22Aと22B、磁気抵抗22Cと22Dを接続すると共に、この磁気抵抗22Cと22Dの両端に切換手段24Aと24Bを設けて磁気検出素子21を形成すると共に、これを磁石34や35に対向して配置し、制御手段37が磁気検出素子21の切換手段24Aと24Bを切換え、差動増幅手段27Aを介した磁気抵抗22からの複数の磁気信号を減算して、回転体31の回転角度を検出することによって、温度変化等による誤差がなく、高精度で確実な回転角度の検出が可能なものを得ることができる。
(もっと読む)
位置検出装置
【課題】 操作感覚に違和感を与えにくい位置検出装置を提供する。
【解決手段】 ハンドルバー2に設けられたハンドルグリップ3の回動動作に基づいて回動する被検出部4と、被検出部4を検出する検出部5と、被検出部4と検出部5とを収納するケース6とを備えた位置検出装置1において、被検出部4を構成するホルダ部材4aと、ホルダ部材4aを回動可能に支持するとともに検出部5を保持する支持部材7とを備え、ホルダ部材4aに支持部材7と摺動する第一の摺動部4dを設け、支持部材7に第一の摺動部4dと摺動する第二の摺動部76を設け、ホルダ部材4aに第一の摺動部4dと第二の摺動部76との摺動部分を覆うカバー部4eを設けたものである。
(もっと読む)
回転角検出装置、および、これを用いた電動パワーステアリング装置
【課題】高精度に被検出部の回転角度を検出可能な回転角検出装置、および、これを用いた電動パワーステアリング装置を提供する。
【解決手段】回転角検出装置10のブリッジ回路部11、12は、被検出部の回転に応じて変化する回転磁界を感知し被検出部の回転角度に応じてインピーダンスが変化するセンサ素子21〜28により構成される複数のハーフブリッジ14〜17を有する。制御部51は、複数のハーフブリッジ14〜17から出力される出力信号をハーフブリッジ14〜17毎に取得し、位相ずれαを補正するための位相補正値φを算出する。メモリ部52は、位相補正値φを記憶する。制御部51は、位相補正値φに基づき、補正前回転角度θを補正する。これにより、位相補正値φに基づいて補正前回転角度θを補正するので、センサ素子21〜28の実装ずれ等があっても、高精度に被検出部の回転角度δを算出することができる。
(もっと読む)
トルクインデックスセンサ
【課題】トルクセンサとインデックスセンサの機能を併せ持ち、部品点数の削減及びコンパクト化に寄与することが可能なトルクインデックスセンサを提供する。
【解決手段】磁気検出方向を互いに逆向きにした一対の磁気検出素子3a,3bによって検出するトルク検出部4と、この磁気検出素子3a,3bによって連結軸2の回転基準位置を検出する回転基準位置検出部5と、を備えるトルクインデックスセンサにおいて、回転基準位置検出部5は、連結軸2の周方向に同一の磁極が対向するように設けられた一対の磁石6と、一対の磁石6と一対の磁気検出素子3a,3bの間に位置し、連結軸2と一体に回転するように設けられ、回転基準位置で一対の磁石6の磁路を形成するための回転側磁性部品7と、一対の磁気検出素子3a,3bの間に設けられ、回転側磁性部品7からの磁束を一対の磁気検出素子3a,3bに均等に流すための固定側磁性部品8と、を備える。
(もっと読む)
回転角・トルクセンサ
【課題】必要な部品点数が少なく、車両の省スペース化を実現できる回転角・トルクセンサを提供する。
【解決手段】回転角・トルクセンサ100において、それぞれ回転軸に対して固定された第1及び第2の磁気センサ10,11と、第1のシャフト4の回転に応じて、第1の磁気センサ10の位置に第1周期数の周期的な第1の磁界を生成する磁石ローター1と、第2のシャフト5の回転に応じて、第2の磁気センサ11の位置に第2周期数の周期的な第1の磁界を生成する磁石ローター2と、第1及び第2の磁気センサ10,11の出力に基づいて第1及び第2のシャフト4,5それぞれの機械角を算出するとともに、算出した第1及び第2のシャフトそれぞれの機械角に基づいて第1のシャフト5にかかるトルクを算出する演算回路30とを備え、第1周期数と第2周期数とは互いに異なることを特徴とする。
(もっと読む)
回転角・トルクセンサ
【課題】軸ぶれをキャンセルでき、かつトルクセンサと回転角センサ両方の機能を有する回転角・トルクセンサを提供する。
【解決手段】回転角・トルクセンサ100において、それぞれ回転軸に対して固定された第1乃至第4の磁気センサ10〜13と、第1のシャフト4の回転に応じて、第1及び第3の磁気センサ10,12の位置に第1周期数の周期的な第1の磁界を生成する磁石ローター1と、第2のシャフト5の回転に応じて、第2及び第4の磁気センサ11,13の位置に第2周期数の周期的な第1の磁界を生成する磁石ローター2と、第1及び第3の磁界センサ10,12の出力に第1の演算を施すことにより得られる演算出力と、第2及び第4の磁界センサ11,13の出力に第2の演算を施すことにより得られる演算出力とに基づいてステアリングの操舵角とトルクとを算出する演算回路30とを備え、第1周期数と前記第2周期数とは互いに異なることを特徴とする。
(もっと読む)
回転角検出装置及び電動パワーステアリング装置
【課題】レゾルバが出力するセンサ信号の何れかに異常が生じた後においても、正常なセンサ信号を特定して、その回転角検出を継続することのできる回転角検出装置を提供すること。
【解決手段】各センサ信号Sa,Sb,Scの振幅値a,b,cに基づいて、これら各センサ信号Sa,Sb,Scにおける任意の二信号の組み合わせ数に対応した複数(3つ)の回転角検出値(θ1,θ2,θ3)を演算する。また、各センサ信号Sa,Sb,Scが正常である場合における当該各センサ信号Sa,Sb,Scの振幅最大値(√A)を保持する。そして、その保持する振幅最大値(√A)、及び検出される各振幅値a,b,c、並びに各回転角検出値θ1,θ2,θ3を代入した場合に、その振幅演算式が成立する組合せが存在するならば、当該成立した振幅演算式に対応するセンサ信号は正常であると判定する。
(もっと読む)
作業車の操向角検出装置
【課題】前輪の操向角を検出する検出作動を長期間にわたり良好に行うことが可能な作業車の操向角検出装置を提供する。
【解決手段】前輪4の操向角を検出する操向角検出センサ35及び検出用操作体37の外方側を囲うセンサ保護カバー38が、前車軸ケース14の上部に取り付けられ、センサ保護カバー38が、周壁部と、その周壁部の上部を閉塞する上壁部と、下向き開口部とを備え、且つ、周壁部に、連係部材39が挿通するとともに前輪支持ケース16の回動操作に伴って連係部材39が移動操作することを許容する孔部44が形成され、操向角検出センサ35が、センサ保護カバー38の内部における孔部44よりも上方側の箇所に取り付けられている。
(もっと読む)
回転角度検出装置
【課題】主に自動車のステアリングの回転角度検出等に用いられる回転角度検出装置に関し、組立てが容易に行え、回転角度の確実な検出が可能なものを提供することを目的とする。
【解決手段】回転歯車10に噛合する第一の検出歯車12の回転中心を、回転歯車10の回転中心から取付面部11Aと直交方向へ延出する中心線CLから偏心させて設けることによって、第一の検出歯車12を回転歯車10に噛合させる際、一方の歯車の歯先と他方の歯先が対向した状態でも、第一の検出歯車12が回転して、各々の歯先と歯底が合った状態で組立てが行えるため、手間がかからず、容易に組立てが可能な回転角度検出装置を得ることができる。
(もっと読む)
回転角検出装置及び電動パワーステアリング装置
【課題】サンプリングタイミングと励磁周期との同期の問題を解消して、より一層の性能向上を実現することができる回転角検出装置を提供すること。
【解決手段】励磁信号S_eを出力する制御マイコンとは独立に設けられた監視マイコンは、レゾルバの出力する各相のセンサ信号Sa,Sb,Scを独自にサンプリングし、その各サンプリング値a,b,cに基づいて、該各センサ信号Sa,Sb,Sc間における二信号の組み合わせ数に対応する3つの回転角検出値(θ1,θ2,θ3)を演算する。そして、その該各回転角検出値間の差分、及びその総和を監視することにより、回転角検出過程における異常判定を実行する。また、監視マイコンは、各センサ信号Sa,Sb,Scと同一のタイミングで励磁信号S_eをサンプリングする。そして、そのサンプリング値Rが「負」である場合には、上記各サンプリング値a,b,cの符号を反転して、上記各回転角検出値の演算を実行する。
(もっと読む)
回転角度・トルク検出装置
【課題】主に自動車のステアリングの回転角度や回転トルクの検出等に用いられる回転角度・トルク検出装置に関し、全体の小型化が図れ、高精度で確実な回転角度と回転トルクの検出が可能なものを提供することを目的とする。
【解決手段】第一の回転体21に第三の磁石35を装着すると共に、この第三の磁石35の磁気を検出する第三の磁気検出素子36を設け、制御手段29が第一の磁気検出素子28からのトルク検出信号によって回転トルクを、第二の磁気検出素子34と第三の磁気検出素子36からの角度検出信号によって回転角度を、各々検出することによって、使用する検出歯車32が一つですみ、全体の小型化が図れると共に、高精度で確実な回転角度と回転トルクの検出が可能な回転角度・トルク検出装置を得ることができる。
(もっと読む)
回転角度検出装置の初期設定方法
【課題】初期設定作業の簡素化を図りつつ、しかも当該作業精度に依存することなく検出誤差を低減することができる回転角度検出装置の初期設定方法を提供する。
【解決手段】初期設定時には、まず主動歯車が正方向へ任意の角度だけ回転される。このときサンプリングされる第1及び第2の従動歯車の回転角度αn,βnと、これらに基づき算出される主動歯車の仮回転角度θLから逆算される第1及び第2の従動歯車の回転角度αL,βLとの関係に基づき、2つの回帰直線Y1,Y2が求められる。同様にして、主動歯車が逆方向へ任意の角度だけ回転されたときの2つの回帰直線Y3,Y4が求められる。つぎに、各回帰直線Y1〜Y4と、サンプリングされる第1及び第2の従動歯車の各回転角度αn,βnとの差分の平均値が、実際にサンプリングされる第1及び第2の従動歯車の回転角度に加算される補正データとして初期設定される。
(もっと読む)
41 - 60 / 281
[ Back to top ]