
Fターム[2F063DA05]の内容
電気磁気的手段を用いた長さ、角度等の測定 (19,512) | 測定方法 (3,108) | 測定内容を直接信号に変換して測定 (1,291)
Fターム[2F063DA05]に分類される特許
101 - 120 / 1,291
地中障害物磁気探査方法
【課題】シールド掘進機による掘削前に、該シールド掘進機の進路における地中障害物の有無を、構造簡単且つ低コストで探査する。
【解決手段】検知可能半径rの磁気センサーを用い、シールド掘進機のシールド筒体内から、該シールド掘進機の進行方向の地盤に長尺な棒を挿入可能な探査孔を2以上の複数箇所に形成し、且つ、前記複数の探査孔を、それぞれ少なくとも1つの他の探査孔との距離Rが、r<R<2rを満たすように形成し、1つの前記探査孔に、先端に前記磁気センサーを取り付けた長尺な探査棒を挿入して行う先の磁気探査工程と、前記先の磁気探査工程の後に、前記探査棒を、先の磁気探査工程を行った探査孔から距離Rの位置の地盤に形成された他の探査孔に挿入して行う後の磁気探査工程とを行い、前記先の磁気探査工程と後の磁気探査工程の結果から、前記地中障害物の位置を判断する位置検知工程を有する地中障害物磁気探査方法。
(もっと読む)
ロータリセンサ

【課題】製造が容易で、検出感度を向上させたロータリセンサを提供する。
【解決手段】ロータリセンサ1のハウジング2は検知部3を収納して、二輪車の車体に取り付けられる。ロータ4は導電材料により形成され、ハウジング2に対して回転自在に設けられ、スタンド101の回転に伴ってスタンド101とともに回転する。このロータ4の一部で被検知部42が構成されている。検知部3は回路基板30を有し、回路基板30には平面コイルからなるコイル31が形成されている。コイル31は、回路基板30に実装された集積回路32によって高周波で駆動され、ロータ4の回転に伴い被検知部42との距離が変化することによって、そのコンダクタンスが変化する。集積回路32では、コイル31のコンダクタンスの変化から、スタンド101が起立位置にあるか、或いは、格納位置にあるかを検出する。
(もっと読む)
回転検出装置
【課題】回転検出装置の組立作業性を向上させることにある。
【解決手段】外周側にコイルが巻装される略円筒形状のボビン21と、ボビン21の軸心に嵌入される鉄心コア23と、鉄心コア23を磁化させるマグネットとを有するパルサ13であって、ボビン21の端部21aには一対のターミナル28a,28bがインサートモールドされている。一対のターミナル28a,28bは、コイル接続部30と、リード線接続部31と、コイル接続部30とリード線接続部31とを連結する連結部29とを備えている。コイル接続部30にはコイルの両端に設けられた撚り線部33a,33bが電気的に接続され、リード線接続部31にはリード線の一端が電気的に接続されており、これらコイル接続部30とリード線接続部31とが平面状に形成されている。
(もっと読む)
電動アクチュエータ
【課題】 出力軸の回動の駆動力として伝達されるべき減速歯車の回転力が、出力軸を傾かせる力として作用しても、回転角検出装置の本体とシャフトの適正な角度(略直角)を保ちながら保持する。
【解決手段】 保持具25は、回転角検出装置20を装着する装着部25bと、ベース部11に締結される締結部25aと、装着部25bと締結部25aとの間に、一対の軸受部22の軸受中心を結ぶ仮想直線に対する出力軸15の傾きに応じて変位する受動部25cとを有し、受動部25cの変位に応じて装着部25bを変位させる。
(もっと読む)
回転検出装置
【課題】コイルやリード線の断線を防止することにある。
【解決手段】外周側にコイルが巻装される略円筒形状のボビン21と、ボビン21の軸心に嵌入される鉄心コア23と、鉄心コア23を磁化させるマグネットとを有するパルサ13であって、ボビン21の端部21aには一対のターミナル28a,28bがインサートモールドされている。一対のターミナル28a,28bは、導電材料によりボビン21の端部21aの断面形状に沿う略円弧状に形成されている。この一対のターミナル28a,28bには、コイルの両端に設けられた撚り線部33a,33bと、エンジン制御装置に一端が接続された一対のリード線の他端とがそれぞれ電気的に接続されている。
(もっと読む)
回転角検出装置、トルク検出装置、及び電動パワーステアリング装置
【課題】高い角度分解能を確保しつつ、一の回転角センサが出力するセンサ信号に基づいて検出対象の機械的な一回転を一周期とする機械角の検出が可能な回転角検出装置を提供すること。
【解決手段】トルクセンサを構成する各回転角センサは、3倍角成分及び7倍角成分の合成波形を有するとともに回転角に応じた信号変化の位相が均等にずれた三相のセンサ信号を出力する。一方、各回転角検出部は、各センサ値a,b,cから該各センサ値a,b,cの平均値を減算して各センサ値a,b,cに含まれる7倍角成分の値を抽出することにより7倍の軸倍角を有する電気角θelを検出する。そして、その電気角θelに基づき推定される7個の機械角推定値θab_e(θab_e1〜θab_e7)を3倍角成分に換算して上記各センサ値a,b,cの平均値と比較することにより、検出対象であるステアリングシャフトの機械角θabを検出する。
(もっと読む)
車両の変速操作装置
【課題】複数の変速レンジのうちのいずれか1つを選択できるようにすると共に、特定の変速レンジにおいては、運転者の連続的な操作意志を追加的に表現できるようにし、運転者の連続的な操作意志に伴う制御が行えるようにした車両の変速操作装置を提供する。
【解決手段】メインシャフトと、メインシャフトに沿った摺動と回動とが可能なように設けられた変速レバーと、変速レバーが単一経路上を往復移動できるように、変速レバーの移動経路を規定すると共に、複数の変速レンジが前記移動経路上に並んで配置されたゲートパターンを備えたゲートプレートと、を含んで構成され、
ゲートパターンは、特定の1変速レンジを除いた残りの変速レンジと、特定の1つの変速レンジと、が互いに区分できるように形成され、特定の1つの変速レンジは、変速レバーがゲートプレートに対し連続的に変位するように設定されていることを特徴とする。
(もっと読む)
回転角度検出装置
【課題】主に自動車のブレーキペダル等の回転角度検出に用いられる回転角度検出装置に関し、簡易な構成で、確実な回転角度の検出とストップランプの消点灯等が可能なものを提供することを目的とする。
【解決手段】磁石16の回転中心に対して所定角度間隔で、複数の磁気検出素子18Aと18Bを対向配置すると共に、磁気検出素子18Aと18Bからの検出信号L1とL2を加算または減算して回転角度を検出する第一の制御回路19と、検出信号L1とL2を除算した後、逆関数に変換して回転体12の回転角度を検出する第二の制御回路21と、印加された電圧に応じて、第一の制御回路19と第二の制御回路21のいずれを動作させるか切換えるスイッチング回路24を備えることによって、簡易な構成で、確実な回転角度の検出とストップランプの消点灯等が可能な回転角度検出装置27を得ることができる。
(もっと読む)
回転角度検出装置
【課題】主に自動車のブレーキペダル等の回転角度検出に用いられる回転角度検出装置に関し、簡易な構成で、確実な回転角度の検出とストップランプの消点灯等が可能なものを提供することを目的とする。
【解決手段】回転体12に装着された磁石16の回転中心に対して、所定角度間隔で複数の磁気検出素子18Aと18Bを対向配置すると共に、制御回路19が複数の磁気検出素子18Aと18Bからの検出信号L1とM1を加算または減算し、演算信号N1やP1から回転体12の回転角度を検出することによって、高精度な回転角度の検出が行えると共に、簡易な構成で、確実な回転角度の検出と、ストップランプの消点灯等が可能な回転角度検出装置を得ることができる。
(もっと読む)
対象物の構成金属および対象物までの距離を検知するセンサおよび方法
【課題】本願発明は、対象物を構成する金属ならびに検知コイルから対象物までの距離を極めて短時間で検知できる材質測距センサを提供する。
【解決手段】本願発明に係る材質測距センサは、LCR共振回路部と、これに高周波電流を供給するための駆動部と、LCR共振回路部の駆動電圧および駆動電流を検出する駆動電圧検出手段および駆動電流検出手段と、駆動電圧および駆動電流からn次駆動電圧およびn次駆動電流を抽出するn次成分抽出手段と、n次駆動電圧およびn次駆動電流から共振周波数および負荷抵抗を算出する制御部と、複数の既知の金属、および複数の既知の対象物までの距離について事前に検知した共振周波数と負荷抵抗との関係を示す検知マップを記憶する記憶部とを備え、制御部は、算出された共振周波数および負荷抵抗と、記憶されたものとを比較して、対象物の構成金属または対象物までの距離を検知するものである。
(もっと読む)
回転磁界センサ
【課題】簡単な構成で、検出角度の誤差を低減できるようにする。
【解決手段】回転磁界センサ1は、検出回路11,12と、検出回路11,12の出力信号S1,S2に基づいて角度検出値を算出する演算回路13を備えている。検出回路11,12は、それぞれ、少なくとも1つのMR素子列を含んでいる。各MR素子列は、直列に接続された複数のMR素子によって構成されている。各MR素子は、磁化固定層と、自由層と、磁化固定層と自由層の間に配置された非磁性層とを有している。各MR素子列を構成する複数のMR素子の数は、2以上の偶数である。各MR素子列を構成する複数のMR素子は、MR素子の対を1つ以上含んでいる。対を構成する2つのMR素子における磁化固定層の磁化方向は、0°および180°を除く所定の相対角度をなしている。
(もっと読む)
回転角度検出装置
【課題】主に自動車のステアリングの回転角度検出等に用いられる回転角度検出装置に関し、小音化が図れ、確実な回転角度の検出が可能なものを提供することを目的とする。
【解決手段】上面中央に磁石5Aが装着された第一の検出歯車12の、下面中央に磁性体19を設け、第一の検出歯車12を下方へ付勢することによって、第一の検出歯車12の上下方向のがたつきがなくなるため、多少の振動や衝撃が加わっても衝突音の発生を防ぐことができ、小音化が図れ、確実な回転角度の検出が可能な回転角度検出装置を得ることができる。
(もっと読む)
位置検出装置
【課題】広い検出範囲でありながら、高い測定精度をもち安価で小型の位置検出装置を提供する。
【解決手段】磁石3の長さより短い配置間隔で磁気検知器5を複数個並べ、検出範囲を複数の磁気検知器5で分割して測定する。これにより任意の検出範囲の位置検出装置が製作でき、検出範囲が長い場合でも磁石3が小型にでき、さらに位置検出装置の全長を短くできる。また、磁石3の着磁方向を移動方向に異極とし、移動方向に垂直な方向の磁力線を検出対象とすることで、磁力線の強さが磁石の全長方向に広い範囲でなだらかに変化するので、検出精度の高い位置検出装置が実現できる。さらに検出範囲を複数の磁気検知器5で分割して測定するので、位置測定の分解能を高くでき、高精度の測定が可能となる。
(もっと読む)
アングルセンサ及び電動パワーステアリング装置
【課題】長い待機時間や複雑な調整作業を要することなくステアリングシャフトやモータの回転角度を検出することができるアングルセンサ及びこれを備えた電動パワーステアリング装置を提供する。
【解決手段】ステアリングシャフト2の回転角度に関連する情報を取得する角度情報取得手段(モータ回転角度センサ11)を備え、外部から指令が送出された場合に角度情報取得手段で情報を取得するアングルセンサ10である。角度情報取得手段は、MR素子又はHall素子を有し、外部から間欠的に供給される電力による作動する。電動パワーステアリング装置1は、アングルセンサ10で取得した情報に基づいてステアリングホイール3の操舵角度を算出するコントロールユニット20を備える。
(もっと読む)
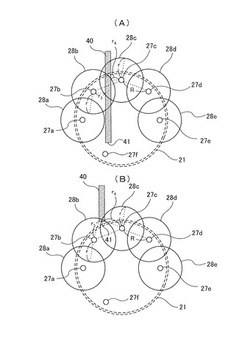
ロータの歪計測装置、及び線材取付具
【課題】ロータに取り付けられる歪計測装置の信号線を磁気シールドしつつも、この信号線の施工性を高める。
【解決手段】信号線31をロータ1に固定する線材取付具40aは、信号線の長手方向Lの一部に対向する線材押え付け部42と、線材押え付け部42の外周縁であって信号線の径方向Dの両外周縁に形成され、ロータに接合される接合部43と、が形成されているステンレス体41を有している。この線材取付具40aは、さらに、ステンレス体のロータに対向する側の面であって、線材押え付け部42の面と接合部43の少なくとも一部の面に設けられていると共に、信号線の長手方向Lにおける線材押え付け部42の一方の側から、長手方向Lにはみ出している銅箔45と、を有している。
(もっと読む)
歪測定装置
【課題】外径が所要範囲にある限り外径が異なる種々のパイプ部材(100)の表面に摩擦型歪ゲージ(64)を充分迅速に且つ容易に押圧して、パイプ部材の表面の歪を測定することができる歪測定装置を提供する。
【解決手段】歪測定装置の支持ケース(2)に、支持ケースから延出し且つ磁石(88)を所要方向に移動自在に保持する一対の保持手段(86、200、300、400)を付設し、かかる一対の保持手段の各々に保持された磁石を、歪を測定すべきパイプ部材の表面に吸着せしめるようになす。
(もっと読む)
アングルセンサ及び電動パワーステアリング装置
【課題】消費電力を節減しながら必要なタイミングで作動してシャフトの回転角度を検出することができるアングルセンサ及びこれを備えた電動パワーステアリング装置を提供する。
【解決手段】ステアリングシャフト2の回転角度に関連する情報を取得する角度情報取得手段(モータ回転角度センサ11)を備え、外部から指令が送出された場合に角度情報取得手段で情報を取得するアングルセンサ10である。角度情報取得手段は、外部から間欠的に供給される電力により作動するとともに、ステアリングシャフト2の回転角速度に応じて作動時間が変化するように構成される。電動パワーステアリング装置1は、アングルセンサ10で取得した情報に基づいてステアリングホイール3の操舵角度を算出するコントロールユニット20を備える。
(もっと読む)
歯車伝達装置用物理量測定装置
【課題】歯車伝達装置を構成する歯車4aの変位方向及び変位量を測定して、この歯車伝達装置が伝達するトルクの方向及び大きさを測定可能な構造を実現する。
【解決手段】1対のセンサ7a、7bの検出部を、はすば歯車であって他の歯車と噛合した前記歯車4aの外径側端部に形成した歯5aに対し、径方向及び軸方向に、それぞれ対向させる。この歯車4aは、トルク伝達に伴って軸方向に変位する。そして、前記センサ7a、7bの出力信号同士の間に存在する位相差が、前記歯車伝達機構が伝達するトルクの方向及び大きさにより変化する。そこで、この位相差に基づいて、このトルクを求める。
(もっと読む)
移動体の位置読取装置
【課題】部品の寸法上の誤差や変形に関わらず移動体の位置を常に正確に読み取ることができる移動体の位置読取装置を提供する。
【解決手段】移動体の移動可能方向に延在形成され移動体の位置を記録する位置記録部110と、位置記録部を配置したフレーム120と、位置記録部と所定距離離間しかつ位置記録部に沿って延在するようにフレームに支持されたガイド軸130と、位置記録部に記録された移動体の位置を読み取る読取部140と、ガイド軸に沿って移動し、読取部が位置記録部と所定間隔隔てて対向配置するように読取部を備えたケース本体150と、ケース本体に備わった読取部とフレームに配置された位置記録部との間隔をケース本体がガイド軸の何れの位置にあっても一定となるようにケース本体を位置記録部に付勢する付勢部材160と、を備えた。
(もっと読む)
回転角検出装置、および、これを用いた電動パワーステアリング装置
【課題】中間値固着異常が生じていることを適切に判断することができる回転角検出装置、および、これを用いた電動パワーステアリング装置を提供する。
【解決手段】回転角検出装置10の制御部50は、ハーフブリッジ14〜17から出力される出力信号Vx1、Vx2、Vy1、Vy2を、ハーフブリッジ14〜17毎に取得する。制御部50は、取得された出力信号Vx1、Vx2、Vy1、Vy2に基づき、被検出部87の回転角度θを算出する。制御部50は、取得された出力信号Vx1、Vx2、Vy1、Vy2に基づいて算出される演算値C1またはC4に基づき、演算値C1またはC4の算出に用いた出力信号Vx1、Vx2、Vy1、Vy2に中間値固着異常が生じているか否かを判断する。これにより、中間値固着異常が生じているか否かを適切に判断することができる。
(もっと読む)
101 - 120 / 1,291
[ Back to top ]