
Fターム[2F065GG13]の内容
光学的手段による測長装置 (194,290) | 光源 (11,799) | 光源形態 (1,634) | 点の配列 (783)
Fターム[2F065GG13]の下位に属するFターム
Fターム[2F065GG13]に分類される特許
21 - 40 / 423
光学式位置検出装置
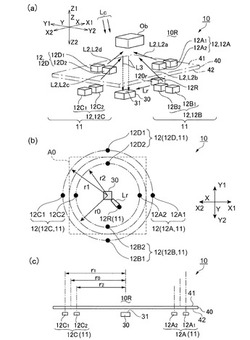
【課題】対象物体が検出用光源を配置した領域の外側に位置しても内側に位置しても対象物体の位置を検出できる光学式位置検出装置を提供する。
【解決手段】光学式位置検出装置10において、検出用光源部12が検出光L2を射出した際に対象物体Obで反射した検出光を光検出部30で検出して対象物体Obの座標を検出する。検出空間10Rからみたときに、光検出部30は、複数の検出用光源部12より内側に位置するとともに、複数の検出用光源部12は各々、第1の発光素子12A1〜12D1と第2の発光素子12A2〜12D2とを備えている。従って、第1の発光素子12A1〜12D1が点灯した際の光検出部30での受光強度と第2の発光素子12A2〜12D2が点灯した際の光検出部30での受光強度との比較結果に基づいて対象物体Obが検出用光源部12より外側に位置しても内側に位置しても対象物体Obの位置を検出することができる。
(もっと読む)
形状測定装置

【課題】プローブを交換する事無く種々の測定精度を得ることができる形状測定装置を提供すること。
【解決手段】第1のライン光を測定物に照射する第1光学系と、第1光学系の少なくとも一部の光学素子を有し、第1のライン光よりも長い第2のライン光を測定物に照射する第2光学系とを有する光照射部と、前記測定物による前記第1のライン光の散乱光を検出する第1の検出部と、前記測定物による前記第2のライン光の散乱光を検出する第2の検出部と、を備える形状測定装置である。
(もっと読む)
認識対象物、対象物認識装置およびプログラム、対象物認識システム
【課題】撮像される認識対象物の予め定められた位置に設けられ、共通平面上に位置する一の識別部と、他の識別部と、を有し、一の識別部を撮像可能な前記共通平面の法線方向に対して予め定められた角度範囲の一部からは他の識別部が撮像されることを抑制する、認識対象物を提供することにある。
【解決手段】撮像される認識対象物であって、予め定められた位置に設けられ、共通平面上に位置する少なくとも3の第一識別部からなる第一識別部群と、前記第一識別部群の位置に基づいて定められる位置に設けられた少なくとも1の第二識別部と、を備え、前記第一識別部は、前記共通平面の法線方向に対して予め定められた角度範囲0〜θ1度にて撮像され、前記第二識別部は、前記共通平面の法線方向に対して予め定められた角度範囲0〜θ2度にて撮像され、θ1とθ2とは、θ1>θ2の関係を有する、ことを特徴とする認識対象物。
(もっと読む)
対象物の認識システム、見守りシステム、監視システム
【課題】エネルギ照射装置と2次元撮像装置を用いることで、種々の条件下で頑健に動作する対象物認識システムおよび見守りシステム、監視システムを提供する。
【解決手段】観測対象となる空間に向けて、所定の位置から照射方向を変えながら、エネルギを照射する照射手段と、照射手段で照射されたエネルギの反射エネルギを2次元的に感知し、対象となる空間を2次元的に撮像する撮像手段と、撮像手段で撮像した撮像画像上の切断曲線の特徴を用いて対象物の認識を行う認識手段とを備える対象物認識システムおよび該システムを備える見守りシステム、監視システム。
(もっと読む)
光学式検出装置、表示システム及び情報処理システム
【課題】従来よりも小型な構成で対象物の位置を検出することができる光学式検出装置、表示システム及び情報処理システム等を提供すること。
【解決手段】光学式検出装置100は、照射光LTを出射する照射部EUと、照射光LTが検出エリアRDETに存在する対象物OBに反射されることによる反射光LRを受光する受光部RUと、受光部RUの受光結果に基づいて対象物OBの位置情報を検出する検出部110とを含む。照射部EUは、照射部EUの一端から検出エリアRDETに対して出射される第1の照射光と、照射部EUの他端から検出エリアRDETに対して出射される第2の照射光と、照射部EUの一端と他端との中間部から検出エリアRDETに対して出射される第3の照射光とがそれぞれに交差し、且つ、第1、第2、及び第3の照射光のそれぞれの強度が異なるように、照射光LTを出射する。
(もっと読む)
位置検出装置、入力機能付き表示システムおよび位置検出方法
【課題】検出光が対象物体以外の物体で反射して受光部に入射することに起因する検出誤差の発生を防止することのできる位置検出装置、該位置検出装置を備えた入力機能付き表示システム、および位置検出方法を提供すること。
【解決手段】位置検出装置10において、位置検出の際、受光部13は、対象物体Obで反射した検出光L2を受光するとともに、検出光L2が対象物体以外の物体Sbで反射した検出光(迷光L5)も受光する。ここで、迷光L5の強度は、検出光L2の強度に比例する。そこで、検出対象空間10Rを介さずに受光部13に入射する補償光L4を出射する補償用光源部14を設け、検出光L2の強度を増大させたときには、補償光L4の強度を低減し、検出光L2の強度を低減させたときには、補償光L4の強度を増大させる。
(もっと読む)
光学式位置検出装置および入力機能付き表示システム
【課題】広い範囲にわたって対象物体の三次元的な位置を光学的に検出することのできる光学式位置検出装置、および入力機能付き表示システムを提供すること。
【解決手段】光学式位置検出装置10において、光源部12が検出光L2をXY面に沿って放射状に出射した際、第1受光部13は、検出対象空間10Rに位置する対象物体Obで反射された検出光L2を受光し、第1受光部13での受光強度に基づいて対象物体ObのXY座標データを検出する。第1受光部13に対してZ軸方向で離間する位置には第2受光部14が設けられ、かかる第2受光部14も、対象物体Obで反射された検出光L2を受光する。その際、第1受光部13での受光強度と、第2受光部14での受光強度との差や比等の比較結果は、対象物体ObのZ軸方向の位置によって変化するので、かかる比較結果に基づいて対象物体ObのZ軸方向の位置を検出する。
(もっと読む)
位置検出システム及び投射型表示システム
【課題】複数の検出対象物の位置をそれぞれ検出することができる光学式の位置検出システムを提供する。
【解決手段】光学式の位置検出システム1000は、第1検出対象物31と第2検出対象物32とに向けて光を射出する光射出部20と、波長の異なる第1検出対象物31からの第1反射光41を受光する第1受光部51と第2検出対象物32からの第2反射光42を受光する第2受光部52を有し、前記第1検出対象物31は前記第1反射光41を反射する第1反射フィルター61を有し、前記第2検出対象物32は前記第2反射光42を反射する第2反射フィルター62を有する。
(もっと読む)
映像表示スクリーン、映像表示システム、および撮影装置検出方法
【課題】盗撮防止用の妨害画像としての非可視光を含む映像から該非可視光を除去して盗撮しようとする者を容易に検出する技術を提供する。
【解決手段】映像表示システム1は、映像を表示する映像表示部と、映像と共に、可視光以外の光を観察者に対して照射する非可視光発光部と、観察者が有する撮影装置から反射された非可視光を受けて、フレーム画像データを生成する非可視光受光部と、前記画像データを処理することにより、前記撮影装置の存在を検出する画像処理部143とを備える。画像処理部143は、背景画像を表すリファレンス画像データを参照し、前記フレーム画像データから前記背景画像の成分を除去する背景削除部150と、背景削除部150の処理後のフレーム画像データを、複数フレームにわたって平均化処理を行うことにより、フリッカを除去するフリッカ除去部151とを備える。
(もっと読む)
移動情報測定装置
【課題】移動体の曲面からの信号に関してデフォーカスによる信号振幅減少を低減し、移動情報の検出精度の低下を抑制する。
【解決手段】光源と、移動方向に曲面を備える移動体と、前記曲面からの集光された反射光または透過光を受講する受光素子と、を有する移動情報測定装置において、前記曲面が移動方向に複数種の曲率を備える。
(もっと読む)
光学式位置検出装置
【課題】検出用発光素子と受光素子との位置関係を適正化することにより、対象物体の位置を広い領域にわたって検出することのできる光学式位置検出装置を提供する。
【解決手段】光学式位置検出装置10において、X軸方向で離間する第1発光受光部15Aと第2発光受光部15Bとを順次排他的に駆動した際の駆動結果と、Y軸方向で離間する第3発光受光部15Cと第4発光受光部15Dとを順次駆動した際の駆動結果とに基づいて、対象物体ObのX座標およびY座標を検出する。複数の発光受光部15のいずれにおいても、検出用発光素子12と受光素子30とが隣り合う位置に配置され、対象物体Obで反射して第1受光素子30Aに到達する光は、対象物体Obにおいて第1検出用発光素子12Aおよび第1受光素子30Aが位置する側に向けて反射した光である。このため、第1受光素子30Aの受光強度は、対象物体Obの位置によって単調に変化する。
(もっと読む)
光学式位置検出装置および入力機能付き表示システム
【課題】広い範囲にわたって対象物体の位置を光学的に検出することのできる光学式位置検出装置、および入力機能付き表示システムを提供すること。
【解決手段】光学式位置検出装置10の検出対象空間10Rは、第1受発光ユニット15Aおよび第2受発光ユニット15Bによる検出対象空間10Rabと、第3受発光ユニット15Cおよび第4受発光ユニット15Dによる検出対象空間10Rcdとに分割されている。第1受発光ユニット15Aと第4受発光ユニット15DとはX軸方向で離間し、第2受発光ユニット15Bおよび第3受発光ユニット15Cは、Y軸方向の一方の側に配置されている。第1受発光ユニット15Aおよび第4受発光ユニット15Dは、X軸方向において、第2受発光ユニット15Bおよび第3受発光ユニット15Cより外側に配置されている。
(もっと読む)
路面平坦性測定装置
【課題】高速道路や普通の道路等の路面を走る自動車に、通常の走行速度で走行させつつ路面の平坦性が測定できるようにした路面平坦性測定装置を提供する。
【解決手段】本発明の路面平坦性測定装置は、自動車の走行方向に沿った3個所に、それぞれ路面までの高さを測定するレーザ測距器を備え、該レーザ測距器のうち、前後2つの測距値を結んだ基準線に対する中間の1つの測距値の変動により路面の形状を測定することを特徴とし、自動車を通常の走行速度で走らせながら路面の平坦性を測定でき、しかも、車上や車内にパソコン等のデータ処理ユニット及びその付属機器を搭載でき、測定する路面上の距離に限界がなく、測定が短時間で済み、時間と労力が大いに節約できるようにしている。また、各レーザ測距器はトラックの荷台下の空間に設置し、機器類を荷台上に搭載できるようにし、自動車の車輪を距離測定エンコーダに利用できるようにしている。
(もっと読む)
マーク検出装置、基板検査装置およびマーク検出方法
【課題】透明基板に設けられたフィデューシャルマークを確実かつ容易に検出する。
【解決手段】フィデューシャルマークMが設けられた検査対象基板10の一方の面に光を照射すると共に、基板10の一方の面を撮像した撮像データに基づいてマークMを検出する際に、緑色、青色および黒色のうちのいずれかの色で形成された有色半透明シート9bを基板10の他方の面に接するように配設すると共に、少なくともシート9bに対する接触面が黒色および緑色のいずれかの色で形成された有色不透明シート9aをシート9bにおける基板10に対する接触面の裏面に接するように配設した状態において、他方の面がシート9bに接するように配設した基板10の一方の面にLED光源21から赤色光L1を照射すると共に、単色画像データを出力可能な撮像部22によって基板10の一方の面を撮像し、撮像部22から出力された単色画像データに基づいてマークMを検出する。
(もっと読む)
光学式検出装置、電子機器及び投射型表示装置
【課題】広い検出エリアにおいて検出精度の均一化ができる光学式検出装置、電子機器及び投射型表示装置等を提供すること。
【解決手段】光学式検出装置は、照射光LTを出射する照射部EUと、検出エリアRDETに存在する対象物OBにより照射光LTが反射することによる反射光LRを受光する受光部RUと、受光部RUの受光結果に基づいて、対象物OBの位置検出情報を検出する検出部110とを含む。照射部EUは、検出エリアRDETが設定される対象面SOBに対して斜め方向となる第1の面SF1と、対象面SOBに対して斜め方向となり、且つ、第1の面SF1よりも対象面SOBとの成す角が大きい第2の面SF2とにより規定される照射範囲に、第1の面SF1に沿う方向において第1の強度であり、第2の面SF2に沿う方向において第1の強度よりも強度が低い第2の強度である照射光LTを出射する。
(もっと読む)
光学式位置検出装置および光学式位置検出方法
【課題】温度センサ等を追加しなくても、環境温度の変化に応じた適正な補正を行うことのできる光学式位置検出装置および光学式位置検出方法を提供すること。
【解決手段】光学式位置検出装置10および光学式位置検出方法において、補正条件決定部64は、対象物体Obが存在しないデフォルト状態により位置検出部50で検出されたデフォルト二次元座標データの第1座標値と第2座標値との比較結果に基づいて補正条件を決定し、位置検出部50により対象物体Obの二次元座標データを検出する際、補正条件に対応する補正が行われる。従って、環境温度を直接、測定しなくても、温度補正を行うことができるので、検出用光源12からの検出光の出射強度が環境温度によって変化した場合でも、対象物体Obの二次元座標データを精度よく検出することができる。
(もっと読む)
形状測定装置
【課題】プローブの撓みの影響を受けずに高精度の形状測定を行う。
【解決手段】プローブ先端部3に一体に平面ダイクロイックミラー10及び球面ミラー16を設ける。オートコリメータ光学系5により平面ダイクロイックミラー10の傾斜量を測定し、並進移動量測定光学系12により球面ミラー16のX,Y軸方向のずれ量を測定する。ずれ量算出部42bは、測定した平面ダイクロイックミラー10の傾斜量及び球面ミラー16のずれ量に基づいて、プローブ先端部3において被測定物4の表面に接触する接触点となる球19の基準位置に対するX,Y軸方向のずれ量を算出する。推定部42cは、ずれ量算出部42bにより算出されたずれ量から、プローブ先端部3の球19のX,Y軸方向の位置を推定する。
(もっと読む)
光学式位置検出装置および位置検出システム
【課題】広い範囲にわたって対象物体の位置を光学的に検出することのできる光学式位置検出装置、および位置検出システムを提供すること。
【解決手段】光学式位置検出装置10において、検出用光源部12は、検出光L2の出射強度が出射角度範囲の一方側から他方側に向かって減少する第1点灯動作と、検出光L2の出射強度が出射角度範囲の他方側から一方側に向かって減少する第2点灯動作とを行う。従って、第1点灯動作時における受光部13の受光強度と第2点灯動作時における受光部13の受光強度との比較結果に基づいて検出用光源部12に対する対象物体Obの角度位置(角度θ)を検出でき、検出用光源部12が検出光L2を出射した際の受光部13の受光強度に基づいて検出用光源部12から対象物体Obまでの距離rを検出できる。
(もっと読む)
穿孔機械の補助装置および補助装置の制御方法
【課題】穿孔機械の測定値を表示するための補助装置において安全かつ快適な作業が実現される補助装置を得る。
【解決手段】穿孔機械と連結可能な補助装置において、穿孔機械の作業平面に対する傾き、および/または、穿孔機械の作業平面までの距離を含む測定データを求めるための測定装置と、求められた前記測定データに応じて作業平面上にシンボルを投影するプロジェクタと、を設ける。
(もっと読む)
物体の姿勢を求める方法及びシステム
【課題】ネジ及びボルトのような、鏡面反射性で、実質的に円筒形でネジ山を有する物体の姿勢を求める。
【解決手段】物体の姿勢が、物体の画像の組をカメラにより取得することによって求められ、この物体は、この物体の局所領域が実質的に球状に見えるように表面上に配置されたネジ山を有し、カメラは、各組に関して異なる視点にあり、各組における各画像は、シーンが異なる方向から照明されている間に取得される。各画像から特徴の組が抽出され、特徴は、カメラに向かう法線を有する表面上の点に対応する。パラメトリック直線が、各画像に関して点に当てはめられ、この直線は、カメラの中心と、物体の軸とを結合する平面上にある。次に、幾何学的制約が直線に適用され、物体の姿勢が求められる。
(もっと読む)
21 - 40 / 423
[ Back to top ]