
Fターム[2F065MM02]の内容
光学的手段による測長装置 (194,290) | 走査形態 (5,021) | 相対移動によるもの (3,117) | 物体の移動 (2,140)
Fターム[2F065MM02]の下位に属するFターム
Fターム[2F065MM02]に分類される特許
41 - 60 / 368
計測装置、欠陥検査装置及び計測方法
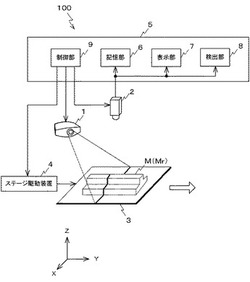
【課題】全体形状と局所的形状とを両方とも精度良く計測する。
【解決手段】プロジェクタ1は物体M上に映像を投影する。撮像装置2はプロジェクタ1によって物体M上に投影された映像を、プロジェクタ1とは異なる角度から撮像する。ステージ3及びステージ駆動装置4は、物体Mとプロジェクタ1及び撮像装置2との間の所定方向の相対走査を実行する。記憶部6には、ステージ3及びステージ駆動装置4による相対走査を実行しつつ、プロジェクタ1によりY軸方向に延びるスリット像を基準となる物体M上に投影させたときに撮像装置2によって撮像される動画像も記憶されている。制御部9は、ステージ3及びステージ駆動装置4による相対走査を実行しつつプロジェクタ1により記憶部6に記憶された動画像を計測対象の物体M上に投影させるとともに、撮像装置2により物体M上に投影された動画像を撮像させる。
(もっと読む)
シート材の欠陥検査方法、及びそれに用いる検査用治具

【課題】表面に微細な凹凸形状等の地合パターンを有するシート材の欠陥を、迅速かつ再現性良く検査する方法を提供する。
【解決手段】焦点調整用シート材を欠陥検査位置に載置し、カメラの焦点を合わせる第1のフォーカス工程、前記焦点調整用シート材から当該カメラの焦点をずらすように調整する第1のデフォーカス工程、第1のフォーカス工程における焦点位置Aから第1のデフォーカス工程における焦点位置Bまでの距離dを計測及び記録する工程、被検査シート材を第1のフォーカス工程と同一又は異なる欠陥検査位置に載置し、その地合パターンにカメラの焦点を合わせる第2のフォーカス工程、及び当該カメラの焦点を、第2のフォーカス工程における焦点位置A’から、前記距離d分ずらした焦点位置B’に合わせる第2のデフォーカス工程、及び焦点位置B’に焦点を合わせたカメラで被検査シート材の欠陥を検査する工程、を含むことを特徴とする欠陥検査方法。
(もっと読む)
半導体装置の製造方法
【課題】薄型化したチップをダイボンディングする工程において、ウエハシートからチップをピックアップする際に、ピックアップ対象のチップを正確に認識できる技術を提供する。
【解決手段】カメラCAM1は鏡筒KT1の一端と接続され、鏡筒KT1の他端には対物レンズが取り付けられ、この対物レンズを通してチップ1Cの主面の画像を撮影する構成とし、鏡筒KT1とチップ1Cとの間には、面発光照明SSL1、拡散板KB1およびハーフミラーTK1を内部に備え、カメラCAM1と同じ光軸でチップ1Cの主面に光を照射する同軸落射照明の機能を有する鏡筒KT2を配置する。
(もっと読む)
サンプル媒体上のレチクルマークを用いて、希少細胞のスキャナ画像座標を顕微鏡座標に変換する方法
【課題】物体の位置を取得する方法を提供する。
【解決手段】画像形成システムの第1座標空間が定められ、該第1座標空間における座標が指定される。第2の画像形成システムの第2座標空間が定められ、該第2座標空間における座標が指定される。第1座標空間の指定された座標を用いることにより、座標変換パラメータが計算される。その後、第1座標空間において少なくとも1つの物体の座標が指定され、該物体の第1座標空間座標が第2座標空間における独自の座標に変換される。
(もっと読む)
画像処理装置および画像処理システム
【課題】撮像装置に対する撮像指示を発生してから実際に撮像が行われるまでにタイムラグが存在する場合であっても、正確にトラッキング処理を行うことのできる視覚センサを提供する。
【解決手段】画像処理装置は、搬送装置の搬送経路における移動量を示す信号を受付けるインターフェイスと、搬送経路において撮像部の撮像範囲より下流側に配置されるとともにワークを取り扱う移動機械、を制御するための制御装置と通信するためのインターフェイスと、撮像部の撮像によって得られた画像に対して計測処理を行うことで、画像中の予め登録されたワークに対応する領域の位置情報を取得する手段と、制御装置との間で搬送経路における移動量を同期して保持する手段と、撮像指示に応答して撮像部による撮像を開始する手段と、位置情報と当該位置情報の取得に用いた画像を撮像したときの移動量とを制御装置へ送信する手段とを含む。
(もっと読む)
寸法測定装置、寸法測定方法及び寸法測定装置用のプログラム
【課題】 低倍率視野内のワークを高倍率視野内へ自動搬送してワークの寸法を高い精度で測定することができる寸法測定装置を提供する。
【解決手段】 XY方向に移動可能な可動ステージ12と、特徴量情報及び測定箇所情報を保持する測定設定データ記憶手段と、ワークWを低倍率で撮影し、低倍率画像を生成する低倍率撮像手段と、特徴量情報に基づいて、低倍率画像におけるワークWの位置及び姿勢を特定するワーク検出手段と、特定された位置及び姿勢に基づいて、ワークWの測定対象箇所が高倍率視野内に収まるように、可動ステージ12を制御するステージ制御手段と、高倍率視野内に移動した測定対象箇所を高倍率で撮影し、高倍率画像を生成する高倍率撮像手段と、測定箇所情報に基づいて、高倍率画像から測定対象箇所のエッジを抽出するエッジ抽出手段と、抽出されたエッジに基づいて、測定対象箇所の寸法値を求める寸法値算出手段により構成される。
(もっと読む)
寸法測定装置、寸法測定方法及び寸法測定装置用のプログラム
【課題】 ワークの寸法を高い精度で測定することができるとともに、被写界深度を越える段差を有するワークであっても、測定対象とする箇所を容易に設定することができる寸法測定装置を提供する。
【解決手段】 可動ステージ12上のワークWを撮影する撮像手段と、可動ステージ12のZ方向の位置が異なる複数のワーク画像を深度合成し、深度合成画像を生成する深度合成手段と、マスターピースを撮影して得られる深度合成画像をマスター画像M1として画面表示するマスター画像表示手段と、マスター画像M1に対し測定対象箇所及び測定方法を指定し、測定箇所情報を生成する測定箇所情報生成手段と、測定箇所情報に基づいて、ワークWを撮影して得られた深度合成画像から測定対象箇所のエッジを抽出するエッジ抽出手段と、抽出されたエッジに基づいて、測定対象箇所の寸法値を求める寸法値算出手段により構成される。
(もっと読む)
3次元測定装置
【課題】測定対象物に投影される縞の像の歪みを防止することができ、また、影の問題や、ハレーションの問題等を解消することができる3次元測定装置を提供すること。
【解決手段】3次元測定装置100は、投影部20と、撮像部30とを含む。投影部20は、基板10に向けて垂線を下ろしたときの基板の表面(投影面)との交点3の周囲の領域である投影可能領域2に縞を投影可能とされる。撮像部30は、投影可能領域2内に複数の撮像領域1を有する。投影可能領域2は、広範な領域とされているので、投影可能領域2内には複数の撮像領域1を設けることができる。撮像可能領域2内における撮像領域1の位置等は、影あるいはハレーションの影響の排除等を目的として設定される。
(もっと読む)
荷電粒子ビーム描画装置
【課題】試料の表面形状を正確に測定して高い精度で描画することのできる荷電粒子ビーム描画装置を提供する。
【解決手段】高さ測定部40において、光源41から照射される光Liをマスク2上で投光レンズ42によって収束させた後、マスク2上で反射した光Lrを受光レンズ43を介して受光素子44に入射させる。受光素子44で光の位置が検出されると、信号処理部60を経て、高さデータ処理部70で高さデータHrが作成される。光Lrの光量が閾値以上であれば、高さデータHrを偏向制御部30へ送る。一方、光Lrの光量が閾値より小さい場合には、描画前に取得した高さデータマップHmから、対応する座標の高さデータを偏向制御部30へ送る。偏向制御部30は、高さデータ処理部70から送られた高さデータに基づいて、電子ビーム光学系10の調整を行う。
(もっと読む)
基板検査装置及び基板検査方法
【課題】基板に形成された凹部の深さを、加工方法の制約を受けず、かつ、任意の時間に、非破壊、非接触で測定する技術を提供する。
【解決手段】基板9に形成された貫通ビア9H(凹部)の深度を検査する基板検査装置100であって、基板9に向けて電磁波パルスを照射する電磁波パルス照射部13と、電磁波パルスを検出する電磁波パルス検出部15とを備える。また、基板検査装置100は、貫通ビア9Hが形成されているビア形成領域92Rを透過した電磁波パルスの時間波形と、ビア形成領域92Rとは異なる参照領域を透過した電磁波パルスの時間波形とを比較して、その位相差を取得する位相差取得部25と、前記位相差に基づいて、前記ビア形成領域に形成された貫通ビアの深度を取得するビア深度取得部27とを備える。
(もっと読む)
三次元表面の計測装置及び方法
【課題】光学的フーリエ変換を採用し、CMP用研磨パッドの複雑な表面形状を実時間でそのまま定量的に評価可能にする。
【解決手段】評価すべき三次元の微小凹凸面の上に溶液を介して溶液層定常化基板を載置する。レーザ照射部は、溶液層定常化基板を通して単一波長光のレーザ光を微小凹凸面に照射する。微小凹凸面から散乱及び回折した光を光学的にフーリエ変換したフーリエ変換像をフーリエ変換像取得部で取得する。このフーリエ変換像を、信号変換器により光強度分布として電気信号に光電変換する。この取得した光強度分布の波形を、基本波数及び少なくとも一つの高調波数に分解したそれぞれの波長とその振幅をスペクトル情報として抽出して、三次元の微小凹凸面の形状を評価する。
(もっと読む)
計測方法及び計測装置
【課題】非球面を含む被検面の計測に有利な技術を提供する。
【解決手段】非球面を含む被検面を照明する第1の光学系と前記被検面からの光を検出面を有する検出部に導く第2の光学系と、既知の非球面形状を有する基準面を前記検出面と共役な面に配置し、前記基準面からの光が前記検出面に入射する角度を前記検出面上の複数の座標のそれぞれについて前記検出部で検出する第1のステップと、前記被検面を前記共役な面に配置し、前記被検面からの光が前記検出面に入射する角度を前記検出面上の複数の座標のそれぞれについて前記検出部で検出する第2のステップと、前記第1のステップで検出された角度と前記第2のステップで検出された角度との角度差により、前記被検面の面形状と前記既知の非球面形状との差分形状を求め、前記既知の非球面形状に前記差分形状を加えることで前記被検面の面形状を算出する計測方法を提供する。
(もっと読む)
ラベル検査方法及び装置
【課題】容器に貼付されたラベルの良否がラベラ内で検査できるラベル検査装置を提供する。
【解決手段】自転しながら公転軌道3aを公転する容器2にラベル7を貼付するラベラ1と、ラベラ1の公転軌道3aを挟んで対向し、かつラベルの正面方向またはラベルの側面方向に設置された少なくとも一対の撮像手段12a〜12dと、撮像手段12a〜12dが撮像した容器2の画像をから容器2に貼付されたラベル7の特徴点を計測する画像計測演算手段と、ラベル7の良否を判定する基準値が設定された良否判定基準値設定手段と、画像計測演算手段が計測した特徴点と基準値とを比較演算してラベル7の良否を判定する良否判定演算手段とから構成したもので、ラベラ1内に撮像手段12a〜12dを設置するだけでよいため、既存のラベラにも容易かつ安価に実施することができる。
(もっと読む)
移動体位置推定装置及び移動体位置推定方法
【課題】異なる場所から検出した特徴点の見え方が各検出場所で変化する場合であっても、移動体の位置を推定することが可能な、移動体位置推定装置及び移動体位置推定方法を提供する。
【解決手段】撮像部2が撮像する周囲画像の撮像範囲内へ投光した線状光が屈曲している部分である折曲部において折曲部平面から予め設定した角度で立ち上がる立ち上がり線を算出する立ち上がり線算出部16と、撮像部2が撮像する周囲画像の撮像範囲の変化に応じて、立ち上がり線算出部16が算出した立ち上がり線と、撮像部2から特徴点までの距離に基づいて、撮像範囲が変化する前の折曲部と撮像範囲が変化した後の折曲部とを照合する特徴点照合部20と、特徴点照合部20が照合した撮像範囲が変化する前の折曲部と撮像範囲が変化した後の折曲部との位置の変位量に基づいて、車両Vの位置を推定する移動体位置推定部22を備える。
(もっと読む)
パターン形成装置、マーク検出装置、露光装置、パターン形成方法、露光方法及びデバイス製造方法
【課題】移動体の位置を高精度に制御しつつ、物体上の複数のマークの検出時間を短縮する。
【解決手段】 露光装置は、ウエハWを保持してXY平面内で移動するとともに、上面にY軸方向を周期方向とする格子を有する一対のYスケール39Y1、39Y2が設けられたウエハステージWSTと、X軸方向に関して検出領域の位置が異なる複数のアライメント系AL1、AL21〜AL24と、X軸方向に関して前記複数の検出領域の両外側に1つずつ配置される一対のYヘッド64y1、64y2を含む複数のYヘッド64を有し、一対のYスケールの少なくとも一方と対向するYヘッドによって、ウエハステージWSTのY軸方向の位置情報を計測するYエンコーダと、を備えている。このため、ウエハステージWSTのY軸方向の移動の際に、ウエハ上の複数のマークを複数のアライメント系で同時に計測可能になる。
(もっと読む)
コンベヤスケール
【課題】 重量測定方式と非接触測定方式との両方の要素を備えることによって、被輸送物の輸送量を求めるというコンベヤスケール本来の機能を確実に保証しつつ、特に重量測定方式の要素に故障等の異常が発生したときに、これを簡単な構成で検知する。
【解決手段】 本発明のコンベヤスケール10は、計量ローラ18と2台のロードセル22および24とを含む重量測定系と、7個の非接触型距離センサ30〜42を含む非接触型測定系と、を備えている。重量測定系が正常なときは、当該重量測定系によって求められた被輸送物100の精確な輸送量が制御装置50のディスプレイに表示される。重量測定系に異常が発生したときは、非接触型測定系によって求められた副次的に精確な輸送量が表示される。なお、重量測定系が正常であるか否かは、重量測定系によって求められた輸送量と非接触型測定系によって求められた輸送量との比較に基づいて、判定される。
(もっと読む)
携帯通信端末、それを用いた計測プログラムおよびそれを用いた計測方法
【課題】ヘッド速度と飛距離とを計測することができる携帯通信端末を提供する。
【解決手段】携帯電話機10はプロセッサを含み、プロセッサは計測処理を開始すると、連続撮影処理を実行する。したがって、1フレーム毎の画像データが取得される。隣接するフレーム間の撮影画像におけるボール画像の動きが判断され、一定以上の動きが有ると、ゴルフボール52が打撃されたと判断される。そして、打撃される直前およびその1つ手前のフレームの撮影画像から、1フレーム間におけるヘッド画像の移動距離が算出され、これに基づいてヘッド速度が算出される。また、ゴルフボール52の打撃位置と到達位置とがGPS衛星からのGPS信号を受信することにより取得され、これらに基づいて飛距離が算出される。
(もっと読む)
測距方法及びレーザ測距装置
【課題】レーザ光の特徴である可干渉性を利用しながら、光学系に機械的手段を用いずに被測定物に関する測距を高精度に行う測距方法及びレーザ測距装置を提供する。
【解決手段】反射部14を所定の角度θだけ傾けて設置することで、参照光の光路長を光路内で連続的に変化させることができる。これにより、受光部18が受光する測定光と参照光による干渉光には干渉縞が形成され、この受光部18の各受光器の光強度データに基づいて明暗データを作成することができる。そして、この明暗データに基づいて測距を行うため、光学系に機械的手段を用いずに被測定物に関する測距を高精度に行うことができる。
(もっと読む)
パターン検査装置
【目的】パターン領域と非パターン領域の間に段差がある被検査試料であっても、効率的に検査可能なパターン検査装置を提供する。
【構成】パターン領域内に指定される被検査領域を記憶する被検査領域記憶部と、被検査試料上のパターン面高さ測定位置に対するパターン面高さ信号を検出するパターン面高さ検出部と、パターン面高さ検出部で検出されるパターン面高さ信号を用いて、被検査試料に対するフォーカスを合わせるオートフォーカス機構と、パターン面高さ測定位置が被検査領域内に位置するか否かを判定する判定部と、判定部が、パターン面高さ測定位置が被検査領域内に位置すると判定する場合にはオートフォーカス機構を駆動し、パターン面高さ測定位置が被検査領域内に位置しないと判定する場合にはオートフォーカス機構を停止するオートフォーカス機構制御部と、を有することを特徴とするパターン検査装置
(もっと読む)
位置測定システムのターゲット面を較正する方法、位置測定システム、およびリソグラフィ装置
【課題】可動オブジェクトの位置を測定するように構成された位置測定システムのターゲット面を較正する方法が用いられる。
【解決手段】位置測定システムは、可動オブジェクト上に設けられたターゲット面と、静止センサシステムと、センサシステムの少なくとも1つの測定信号に基づいて可動オブジェクトの位置を計算する処理デバイスとを含む。処理デバイスは、ターゲット面の凹凸を補正するターゲット面の補正マップを含む。当該方法は、ターゲット面を測定し、測定されたターゲット面ならびにターゲット面および/またはターゲット面に影響を及ぼす物理的オブジェクトの1つ以上の変形モードに基づいてターゲット面全体の再較正された補正マップを決定することによってターゲット面の補正マップを再較正することを含む。
(もっと読む)
41 - 60 / 368
[ Back to top ]