
Fターム[2F065MM02]の内容
光学的手段による測長装置 (194,290) | 走査形態 (5,021) | 相対移動によるもの (3,117) | 物体の移動 (2,140)
Fターム[2F065MM02]の下位に属するFターム
Fターム[2F065MM02]に分類される特許
141 - 160 / 368
基板の形状または厚さの情報を測定するための方法および装置
干渉計システムは、2つの間隔を空けて配置された参照フラットを含み得る。前記2つの間隔を空けて配置された参照フラットは、2つの平行参照表面間に光キャビティを形成する。第1のおよび第2の基板表面が対応する第1の参照表面および第2の参照表面に実質的に平行な様態で、前記第1のまたは第2の基板表面の間の空間が前記参照表面または減衰表面のうち対応するものから3ミリメートル以下の位置に来るように、前記基板を前記キャビティ内に配置するように基板ホルダが構成され得る。前記キャビティの直径方向において対向する両側においてかつ前記キャビティ光学的に結合して、干渉計デバイスが設けられ得る。 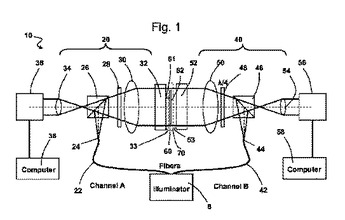 (もっと読む)
(もっと読む)
噴霧粒子撮像解析システムおよび解析方法
【課題】噴霧粒子を撮像し、画像処理を行い、粒子径および粒度速度を同時に測定する噴霧粒子撮像解析システムおよび解析方法を提供すること。
【解決手段】噴霧粒子撮像解析システムは、噴霧粒子の集合(M)に光を照射する光源部(1、2)と、噴霧粒子の前記集合を所定の時間間隔で撮像する撮像部(3、4)と、撮像部によって撮像された画像を記録する記録部と、制御部(8)とを備え、制御部が、画像から粒子を検出し、粒子の粒子径及び円形度を求め、円形度が所定のしきい値以上である粒子を焦点深度内の粒子の候補として選択し、連続測定した2枚の画像の相互相関から平均速度を求め、連続測定した2枚の画像における全粒子の組み合わせについて粒子速度を求め、粒子速度と平均速度の方向が一致し、粒子径が一致し、且つ、粒子速度が平均速度に対して所定範囲内にある粒子を対応する粒子として決定する。
(もっと読む)
タイヤ形状検査方法,タイヤ形状検査装置

【課題】タイヤのサイドウォール面の表面高さ測定値の分布情報から,凹凸のあるマークの形成範囲の測定値を確実にかつ誤認することなく除去する処理を高速で実行することにより,正しい形状欠陥検査を短時間で行うことができること。
【解決手段】プロセッサが,タイヤのサンプルから得られたサンプル表面形状情報に基づいて凹凸のあるマークの位置を自動検出し,そのマークの存在範囲を囲むマスク範囲の座標情報を自動設定し(S2〜S15),前記サンプル表面形状情報に基づく表面形状画像と前記マスク範囲の座標情報に基づくマスク範囲画像とを重ねて表示手段に表示させ,それと並行して,操作入力に応じて前記マスク範囲の座標情報を変更し(S16),検査対象のタイヤから得られた前記表面高さ分布情報と変更後の前記マスク範囲の座標情報との間の座標系のずれを修正し,マスク範囲内の測定値を形状欠陥検査処理の対象から除外する。
(もっと読む)
円形基板の光学的測定方法およびその装置
【課題】対象物の形状によらず、ライン照明とラインセンサの構成の光学的測定装置を用いて高速かつ高精度に、測定対象物のエッジ周辺部付近まで測定する方法および装置を提供する。
【解決手段】支持部材により支持された測定対象物の表面に、ライン照明光を照射し、測定対象物の表面からの散乱光あるいは反射光あるいは透過光を結像光学系を介して受光部に結像させて、測定対象物の状態を測定する場合、ライン照明光が測定対象物のエッジ周辺部にあたらないようにしたことを特徴とする。
(もっと読む)
検査装置及び検査方法
【課題】検査中の高速回転のウェーハに対して、リアルタイムでその反り量を検出する。
【解決手段】被検査体1に光を照射する第一の光照射部600と、該被検査体1からの散乱光を検出する第一の検出器770と、前記被検査体1に光を照射する第二の光照射部920と、前記第二の光照射部920の光によって前記被検査体1から反射した光を検出する第二の検出器910と、前記被検査体を移動させる被検査体移動ステージ410と、前記光が照射される位置の位置座標の情報を出力する検査座標検査部450と、前記第二の検出器910からの検出信号に基づいて前記被検査体1の高さ情報を出力する昇降駆動制御回路940と、前記検査座標検査部450からの位置座標の情報と前記昇降駆動制御回路940からの高さ情報に基づいて前記被検査体1のそり量を算出するデータ処理部500を備えた。
(もっと読む)
リソグラフィ装置及びデバイス製造方法
【課題】生産性を低下させることなく、基板レベルでの測定を行うことのできるリソグラフィ装置の提供。
【解決手段】シングル・ステージ又は複数ステージのリソグラフィ装置において、例えば基板テーブル交換、及び/又は基板のロード及びアンロードの間、テーブルが液体供給システムに対して閉じ込め用の面を形成する。一実施例では、テーブルは、例えば基板テーブル交換、及び/又は基板のロード及びアンロードの間に投影ビームの測定を行うセンサを有している。
(もっと読む)
エンジンマウントの変位量計測方法
【課題】高速な振動現象の下にあっても、エンジンマウントのマウント軸として配設されるボルトの中心の3軸並進量、及び、該ボルトの2軸回転量を高精度に算出することができる、エンジンマウントの変位量計測方法を提供する。
【解決手段】本発明に係るエンジンマウントの変位量計測方法は、球体変位計側工程の前に、第3レーザー変位計31cで計測される球体13の変位の、前記球体13の移動に伴う変化量△S3と、前記球体13の半径r0と、前記球体13の移動量dと、に基づいて前記三角形における三辺の長さを算出し、該三角形について余弦定理を用いることで、第3レーザー変位計31cと、第1レーザー変位計31aとの交差角度βを算出する、変位計測手段の交差角度計測工程を備える。
(もっと読む)
レーザ干渉計
【課題】製造コストを低減させることができ、構成を簡素化することができるレーザ干渉計の提供。
【解決手段】レーザ干渉計1は、所定の周波数を有する変調信号にてレーザ光を変調することでレーザ光の中心波長を安定化して射出するレーザ光源2と、レーザ光を反射する参照鏡4、及び測定鏡5を備える。また、レーザ干渉計1は、参照鏡4、及び測定鏡5にて反射される光の干渉光を変調信号の周波数に対して2以上の整数倍となる周波数のサンプリング周波数でサンプリングしてサンプリング値を取得するサンプリング手段71と、サンプリング手段71にて取得される時系列のサンプリング値をサンプリング周波数に応じて平均して平均値を算出する平均値算出手段721とを備え、平均値算出手段721にて算出された平均値に基づいて、測定鏡5の変位を算出する。
(もっと読む)
表面特性測定装置
波長選択器5が広帯域光源4の波長を選択する。光導波器BS1、BS2が、波長選択器からの光を測定経路に沿ってサンプル表面の領域に向けて誘導すると共に基準経路に沿って基準表面に向けて誘導し、サンプル表面の領域によって反射された光及び基準表面によって反射された光が干渉してインターフェログラムを生成するようにしている。コントローラ20が、波長選択器を制御して、波長選択器によって選択される波長を変更する。記録器63が、連続した画像を記録し、各画像は、波長選択器によって選択された波長のそれぞれ1つによって生成されたインターフェログラムを表す。データプロセッサ18、180が、記録された画像を処理して、サンプル表面の少なくとも一部の表面プロファイル及び表面高マップのうちの少なくとも一方を作成する。基準経路を制御して、振動、熱的効果及び乱流のような環境影響を補償することができる。データプロセッサは、グラフィックス処理装置を用いて、ピクセルデータを並列に処理することを可能にすることができる。  (もっと読む)
(もっと読む)
光デバイス検査のための光イメージング
光イメージング装置は、光周波数領域測定法(OFDM)に基づいて、DUTの内部またはDUT上の複数の位置における散乱データを時間の関数として収集する。光源は検査対象デバイス(DUT)の中に光を投入し、DUTはDUTに沿った1つ以上の位置で光を散乱する。光検出器は、DUTに沿った複数の位置のそれぞれで散乱された光の一部を検出する。データはOFDMデータ処理を使用して決定される。これらのデータは、DUTに沿った複数の位置のそれぞれにおいて収集された時間の関数として表された光量に対応する。データは、DUTに沿った複数の位置のそれぞれに対して記憶される。記憶された時間領域データに基づいて、DUTに沿った複数の位置のそれぞれにおいて散乱された光量を示すユーザ情報が提供される。OFDM処理によって、精細な時間分解能(例えば、0.1ピコ秒)が得られ、それによって、小さな光遅延距離(例えば、30ミクロン)を分解することができる。また、精細な時間分解能と同時に、検出するべき少量の散乱(例えば、10−12)の正確な検出が可能になる。  (もっと読む)
(もっと読む)
ウェーハ欠陥の高速オンライン電気光学的検出のための方法及びシステム
【課題】本発明は、集積回路ダイ又はチップを特徴とする半導体ウェーハのパターン化構造において、ランダムに存在する製造欠陥を電気光学的に検出するための方法及びシステムに関する。
【解決手段】パルス式レーザの短い光パルスで、顕微鏡レンズを有する電気光学カメラシステムの視野を照射し、各々4つの二次元CCDマトリックス光検出器のアレイを含む6つの検出器集合体から形成された光学撮像システムの焦点面に光検出器の表面を光学的に形成する焦点面アセンブリ上に移動中のウェーハを撮像する。二次元CCDマトリックス光検出器の各々が、200万ピクセルのマトリックス電子画像を作成し、異なるCCDマトリックス検出器の同時作成画像を画像処理技術により並行処理し、撮像視野を、基準となる別の視野と比較し、対応ピクセルの差異を、ウェーハダイ欠陥の存在を示すものとして検出する。
(もっと読む)
光センサ計測装置
【課題】データ高速処理装置を不要として小型化できる光センサ計測装置を提供する。
【解決手段】複数のFBGセンサ31,32,3nからそれぞれ得られる反射光スペクトルが閾値以上となるデータに基づいて各反射光スペクトルの中心を求める演算回路41と、複数のFBGセンサ31,32,3nの各々からの反射光スペクトルの中心を求めるための最適な閾値をそれぞれ保存する閾値保存用レジスタアレイ43と、複数のFBGセンサ31,32,3nからそれぞれ得られる反射光スペクトルのデータと閾値保存用レジスタアレイ43で保存されている最適な閾値とを比較して演算回路41に各反射光スペクトルに応じた最適な閾値を出力する比較回路44とを備えた。各FBGセンサ31,32,3nから反射される反射光スペクトルの中心を演算回路41で計算するために必要な閾値を、予め閾値保存用レジスタアレイ43で記憶された複数の最適な閾値から1つ選択する。
(もっと読む)
位置検出装置及び電気光学装置
【課題】光学式の位置検出手段を低コストに構成する。
【解決手段】位置検出装置100は、多角形状に構成された検出平面範囲10R内において対象物体の平面位置を光学的に検出するための装置であり、第1の位置検出光L2aを放出する第1の位置検出用光源12Aと、第2の位置検出光L2bを放出する第2の位置検出用光源12Bと、第1の位置検出光を内部に採り込む第1の光入射面13a、第2の位置検出光を内部に採り込む第2の光入射面13b並びに内部を伝搬する第1の位置検出光及び第2の位置検出光を出射し第1の光入射面及び第2の光入射面と隣接するとともに交差する光出射面13sを有する導光板13と、導光板に対し第1の位置検出光及び第2の位置検出光の出射側に配置され、検出平面範囲に向けられた受光部15aを備え、検出平面範囲の角部の外側に隣接配置された光検出器15とを具備する。
(もっと読む)
測定装置及び被検物の測定方法
【課題】 被検物の表面の高さや形状を高精度に測定する。
【解決手段】 第1の微小開口を通過した照明光を被検物に向けて照射させ、被検物からの反射光を得る共焦点光学系と、第2の微小開口を通過する反射光を検出する光検出部と、反射光における波面収差を検出する収差検出部と、被検物に対する共焦点光学系の焦点位置を光軸方向に変位させる変位部と、変位部により共焦点光学系の位置焦点を複数変位させたときに得られる反射光の強度と波面収差とに基づいて、被検物の表面形状を計測する計測部と、を備えたことを特徴とする。
(もっと読む)
波長ずれ測定装置、光源装置、干渉測定装置、露光装置及びデバイス製造方法
【課題】二光束の光路長差が安定に一定となる構成を備えることにより光源波長の変動をpm以下の精度、分解能で測定可能な波長ずれ測定装置を提供する。
【解決手段】本発明の波長ずれ測定装置は、光源から射出される光束の波長の変動量を測定する波長ずれ検出センサWLCD1であって、光源から射出された光束を複数の光束に分割し、複数の光束のうち二光束を合成して干渉光を生成するビームスプリッタBS2と、ビームスプリッタBS2により分割された二光束の光路長差が一定になるように設けられたスペーサ部材SPと、ビームスプリッタBS2により生成された干渉光を検出する複数の光電センサPDA+、PDB+とを有し、複数の光電センサPDA+、PDB+は、干渉光に基づいて互いに位相がずれた複数の干渉信号を出力し、複数の干渉信号を用いて波長ずれ量を算出する。
(もっと読む)
被検査体の検査装置
【課題】撮像装置に要するコストを抑制しつつ基板上の部品の高さを把握する。
【解決手段】基板検査システムにおいて、ミラー角度制御部は、被検査面の垂線に対する角度の絶対値が互いに異なる撮像角度から見た基板2の映像をラインセンサが走査できるよう撮像角度を切り替える。ミラー角度制御部は、ラインセンサから基板2への光路長が変化しないよう撮像角度を切り替える。ミラー角度制御部は、基板2からの光をラインセンサに向けて反射するハーフミラー42の角度を、ラインセンサから基板2への光路長が変化しないよう変更して撮像角度を切り替える。このときミラー角度制御部は、基板2の表面に対して垂直な垂直撮像角度と、基板2の表面に対して傾斜した傾斜撮像角度とを切り替える。
(もっと読む)
バーニア及び露光位置の測定方法
【課題】ブラックマトリックスに対する着色画素の位置ズレを算出するバーニアで、顕微鏡の焦点深度に影響されず、測定用マークのフリンジ部に影響されず精度よく、安定して位置ズレを算出するバーニア、及び露光位置の測定方法を提供する。
【解決手段】1)バーニアV2は、第一測定用マークM11と第二測定用マークM12で構成され、2)第一測定用マークは、遮光部Sと第一開口部Ka−Aと第二開口部Ka−Bからなり、第二測定用マークは、遮光部上に形成されており、3)第二測定用マークの重心Dは、第一開口部の重心Aと第二開口部の重心Bを結ぶ直線を底辺とする二等辺三角形又は直角二等辺三角形の頂点Cに位置すること。バーニアから一定距離離れた位置に、測定に用いる顕微鏡を移動させるためのターゲットマークTMを備えていること。
(もっと読む)
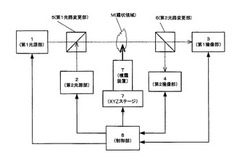
ステージ制御用光学システム
インプリント・リソグラフィは、インプリントの際にテンプレートと基板間の正確なアライメントから利益を得る。テンプレートと基板上の表示から生じるモアレ信号が、高帯域幅の低遅延信号を提供するライン走査カメラとデジタル・マイクロミラー装置(DMD)を含むシステムによって取得される。取得した後、モアレ信号をそのまま使用して、個別の位置/角度エンコーダの必要なしにテンプレートと基板を位置合わせすることができる。  (もっと読む)
(もっと読む)
基板測定方法および基板測定装置
【課題】スループット速度が改善された基板の特性を測定するための方法および装置を提供する。
【解決手段】基板の特性を測定するための方法および装置である。ターゲットが基板上に存在しており、基板の走査移動の間に測定が実行される。基板の走査移動は、リニアな移動であり、測定は、パルス光源を用いてターゲットの反射像を取得することを含む。1つの光パルスの持続時間は100psecである。リソグラフィ装置は、このような測定装置を含み、デバイス製造方法は、このような測定方法を含む。
(もっと読む)
モーショントラッカシステム及びその座標系設定方法
【課題】カメラ装置の撮影領域にカメラ座標系を再設定する際に、カメラ装置の撮影領域にカメラ座標系を短時間で簡単に正確に設定することができるモーショントラッカシステムの提供。
【解決手段】モーショントラッカシステムであって、基準対象物30に取り付けられた少なくとも3個の光学マーカー4を備え、カメラ装置2の撮影領域にカメラ座標系を設定する座標系設定部27と、カメラ座標系における少なくとも3個の光学マーカー4の位置であるキャリブレーション情報を作成してキャリブレーション情報記憶部47に記憶させるキャリブレーション情報記憶制御部31と、基準対象物30に取り付けられた光学マーカー4を撮影することで得られた光学マーカー位置情報と、キャリブレーション情報記憶部47に記憶されたキャリブレーション情報とに基づいて、カメラ装置2の撮影領域にカメラ座標系を再設定する座標系再設定部32とを備える。
(もっと読む)
141 - 160 / 368
[ Back to top ]