
Fターム[2F065MM02]の内容
光学的手段による測長装置 (194,290) | 走査形態 (5,021) | 相対移動によるもの (3,117) | 物体の移動 (2,140)
Fターム[2F065MM02]の下位に属するFターム
Fターム[2F065MM02]に分類される特許
81 - 100 / 368
位置を測定するためのリソグラフィ装置および方法
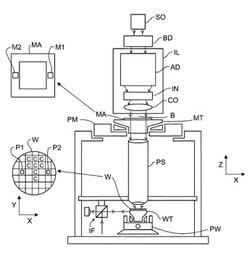
【課題】位置精度性能が向上した、改善されたリソグラフィ装置を提供する。
【解決手段】基準構造に対してある方向に移動可能である支持部と、第1の周波数範囲内で上記方向における基準構造に対する支持部の位置を表す第1測定信号を提供するように構成される第1位置測定システムと、第2の周波数範囲内で上記方向における基準構造に対する支持部の位置を表す第2測定信号を提供するように構成される第2位置測定システムと、(a)第2周波数範囲内の周波数を有する信号成分を減衰させるように第1測定信号をフィルタリングし、(b)第1周波数範囲内の周波数を有する信号成分を減衰させるように第2測定信号をフィルタリングし、(c)フィルタリング後の第1測定信号とフィルタリング後の第2測定信号とを結合して、上記方向における基準構造に対する支持部の位置を表す結合測定信号を生成するように構成されるプロセッサと、を備える。
(もっと読む)
側方端面用検査装置

【課題】金属リング、又は、複数個の金属リングを積層して構成される金属ベルトの側方端面に傷が存在するか否かを確認することを容易にする。
【解決手段】検査装置30は、第1固定ローラ32a、第2固定ローラ32b及び可動ローラ32cを備える。これらローラ32a〜32cは、ローラ本体98a〜98cと、該ローラ本体98a〜98cの下方底部に設けられたフランジ部材96a〜96cとを有する。ローラ本体98a〜98cは、フランジ部材96a〜96cに向かうにつれてテーパー状に縮径する。可動ローラ32cが移動することでローラ32a〜32cに掛け渡された金属ベルト12が緊張した後、ローラ32a〜32cが回転動作されると、該金属ベルト12の下方側の側方端面22aがフランジ部材96a〜96cの上端面に着座する。この着座により、金属ベルト12を構成する金属リング18の上方側の側方端面22bの位置が揃う。
(もっと読む)
形状認識装置
【課題】透明体からなる板状物であっても輪郭を明確に特定する形状認識装置を提供する。
【解決手段】板状物10の輪郭を検出する形状認識装置6であって、板状物10を保持する保持テーブル3と、保持テーブル3上に保持され板状物10を撮像する撮像手段61と、撮像手段61下側に配設された照明手段62と、照明手段62によって照射され保持テーブル3上に保持された板状物10で反射した反射光のうち撮像手段61による撮像領域の正反射光を遮蔽する遮蔽手段63とを具備している。
(もっと読む)
包装装置
【課題】被包装物の平面サイズを正確に特定することを可能とする技術を提供する。
【解決手段】計量包装値付機において、被包装物である商品が載置される載置面には、載置面に載置された商品の輪郭線の少なくとも一部と交差するような模様が形成されている。計量包装値付機の制御部は、商品が載置された状態の載置面を撮像して得られるデータと商品が載置されていない状態の載置面を撮像して得られるデータとの差分データから、商品の平面サイズを特定する。
(もっと読む)
欠陥検査装置
【課題】表面に透明薄膜が形成された基板等の試料において、透明薄膜の上面の微小な異物、キズ等の欠陥を高感度且つ高速に検査することができる欠陥検査装置を提供する。
【解決手段】本発明の欠陥検査装置によると、照明光学系は、試料の表面の法線に対して所定の入射角を有する検査用照明光を試料表面に照射し、試料表面にスリット状のビームスポットを生成する。試料の表面に対して所定の傾斜角にて傾斜した光軸を有する斜方検出系と試料の表面の法線に沿った光軸を有する上方検出系によって、ビームスポットからの光を検出する。斜方検出系と上方検出系の出力によって、試料の表面の透明薄膜上の欠陥を検出する。検査用照明光の入射角は、試料の表面の透明薄膜下面にて反射した反射光が透明薄膜上面にて全反射するときの入射角より僅かに小さい角度である。
(もっと読む)
接触角計
【課題】液滴の平面視輪郭形状をより簡便な方法で接触角と共に測定可能な接触角計を提供する。
【解決手段】本発明に係る接触角計1は、試料2が載置されるステージ20と、試料2上の液滴4を側方から撮像して液滴4の接触角を測定する第1撮像装置30と、試料2上の液滴4を上方から撮像して液滴4の平面視輪郭形状を測定する第2撮像装置40と、を備えている。
(もっと読む)
撮像用パターン
【課題】拡大して撮像した場合であっても基準線に位置決めパターンを容易に合わせることができる撮像用パターンの提供。
【解決手段】撮像用パターン1は、画像機器に撮像される際に、2本の基準線L1,L2に合わせることによって、画像機器に対する位置決めをするための位置決め用パターン13を備えている。位置決め用パターン13は、撮像用パターン1の中心から縦横方向に沿って所定の間隔で複数の図形を配置したパターンとして構成されている。具体的に、各図形は、直角三角形状の暗領域とされ、各図形のうち、縦方向に沿って設けられる各図形は、縦方向に平行な辺13Aを一辺のみ有する図形とされ、横方向に沿って設けられる各図形は、横方向に平行な辺13Bを一辺のみ有する図形とされている。また、各辺13A,13Bの延長線は、撮像用パターン1の中心を通っている。
(もっと読む)
ヘテロダインレーザー干渉測長器
【課題】測長結果から精度よくデッドパスの影響を排除するヘテロダインレーザー干渉測長器を提供する。
【解決手段】ヘテロダインレーザー光源10からのビームを2本の物理的に離れた平行なレーザービームに分岐させて測定ビームB1と参照ビームB2を生成する分岐器80と、測定ビームB1及び参照ビームB2を測定光路LP1,LP2に向けて分割する偏光ビームスプリッタ30と、測定光路LP1,LP2に設けられる1/4波長板31,32と、可動測定物50に仮想直線上にお互いの反射面を反対方向に向けて固定され、測定ビームB11,B12が照射される測定ミラー341,342と、測定ミラー341,342近傍に配置され、参照ビームB21,B22が照射される反射ミラー411,412と、測定ミラー341,342の反射光を干渉させた光と反射ミラー411,412の反射光を干渉させた光に基づく2つのビート信号から変位を算出する演算回路70を備える。
(もっと読む)
誘導飛翔体装置
【課題】誘導飛翔体において、複数の赤外線センサーにより、目標に向け誘導するセンサーシステムを提供する。
【解決手段】誘導飛翔体装置の側面に複数の分散させたウインドウ1を配置して、そのウインドウ1を開口として視野の一部を重なるように複数のセンサ部2を配置し、視野の重なる領域で別々のセンサ部2が探知した目標が同一か否かを判定する同定処理部9を有することで、異なるセンサ部2の視野の間で移動する同一の目標を追尾することができる。
(もっと読む)
位置検出装置及び方法、露光装置、デバイス製造方法
【課題】半導体製造装置のマーク検出率を向上させる。
【解決手段】検出マークの位置を検出する位置検出方法は、検出マークのエッジ位置を特定するためのテンプレートを保持し、検出マークを含む画像に対して、テンプレートを用いたマッチング処理を実行する。ここで、テンプレートにおいて、同一の方向を向くエッジに対応する全てのエッジ位置を当該方向またはその反対方向へ移動することにより当該テンプレートを変更し、上記マッチング処理において算出される相関度が予め定められた判定閾値外の場合に、上記方法でテンプレートを変更しながらマッチング処理を繰り返し、マッチング処理の結果に基づいて位置検出を行う。
(もっと読む)
変位測定装置および速度測定装置
【課題】高精度な変位測定装置を提供する。
【解決手段】移動物体102の変位量を測定する変位測定装置100であって、
発光領域101から発せられた光束で移動物体102を照射する光源と、移動物体102の移動方向において複数の受光領域を備え、移動物体102の凹面103により反射された光束を結像させて受光するフォトダイオードアレイ104、105と、光束を結像させてフォトダイオードアレイ104、105に形成された発光領域像106の移動量から、移動物体102の変位量を測定する測定手段とを有する。
(もっと読む)
マルチフォーカス検査装置及びマルチフォーカス検査方法
【課題】 マルチフォーカス検査装置及びマルチフォーカス検査方法に関し、1回のスキャンで高速且つ高精度の全面外観検査を可能にする。
【解決手段】 測定対象物を撮像する測定ヘッドと、前記測定対象物と前記測定ヘッドを平面内において互いに相対的に移動させる移動機構と、前記測定対象物に光を照射する光源とを備え、前記測定ヘッドは、前記測定対象物に対向して配置された撮像レンズと、前記撮像レンズの合焦面が、前記測定対象物の移動方向に対して直交する平面内或いは前記直交する平面から±45°の範囲内で前記測定対象物の移動方向に傾斜させた平面内に存在するように調整する光学部材と、前記光学部材からの光の結像位置に焦点面が位置するよう配置したイメージセンサとを少なくとも有する。
(もっと読む)
部品検査装置及びプログラム
【課題】複数の部品が任意に配置されている場合であっても、部品の配置による見え方の相違を吸収して大きさや形状等の外観を検査する。
【解決手段】複数の部品を撮影した画像をブロブ処理し、抽出されたエッジから求まるエッジ接線ベクトルを用いてエッジ接線画像に変換し、サンプルエッジ接線画像に対するマスターエッジ接線画像の畳み込み処理により抽出された個々のブロブに基づいて、マスター部品の所定部位のサイズ、位置xm、及び角度θmを定めたテーブルを用いて、検出されたサンプル部品の位置xs及び角度θsに対応するサイズを補完計算して、検出されたサンプル部品の所定部位のサイズと比較して、サンプル部品を検査する。
(もっと読む)
リソグラフィ装置、デバイス製造方法、およびパターンを基板に付与する方法
【課題】基板表面のレベル変動の測定時間を短縮する。
【解決手段】リソグラフィ装置は、パターニングデバイスからパターンを基板(W)に転写するパターニングサブシステムを備える。パターニングサブシステムは、記録された基板表面のレベル変動の測定結果に従って制御される。レベルセンサ(LSP,LSD)は、レベルセンシング放射ビームを投影して基板表面の位置から反射させ、反射したセンシングビームを検出して位置の表面レベルを測定するために設けられる。レベルセンサは、少なくとも一つの移動光学素子(MP,MD)内蔵しており、基板表面を光学的移動(δY)により少なくとも一次元にスキャンして、レベルセンサと基板との間の機械的動作なしで異なる位置の表面レベルの測定結果を取得する。光路長等化手段は、成形リフレクタ及び/または追加的な移動ミラーを用いることにより、スキャンの間の焦点変動を回避するために配置される。
(もっと読む)
光学式位置検出装置、ハンド装置およびタッチパネル
【課題】比較的簡素な構成および信号処理で、対象物体の位置や、対象物体が至近位置に到達したことを確実に検出することのできる光学式位置検出装置、並びに当該光学式位置装置を備えたハンド装置およびタッチパネルを提供すること。
【解決手段】光学式位置検出装置10では、光源装置11が透光部材40において対象物体Obが位置する第1面41側とは反対側の第2面42側から検出光L2を出射して第1面41側に第1面41に対する法線方向で強度が変化する離間距離検出用光強度分布L2Zabを形成する。また、対象物体Obで反射して透光部材40の第2面42側に透過してきた反射光L3を光検出器30で検出する。透光部材40の第1面41は、弾性および対象物体Obに対する吸着性を備えている。
(もっと読む)
カメラ及び検索パターンを使用して対象物の空間特性を決定するためのシステム、装置、方法、及びコンピュータプログラム製品
【課題】対象物ホルダの上面に配置した対象物を評価するためのシステム、装置、方法、及びコンピュータプログラム製品を提供する。
【解決手段】対象物ホルダ110を複数位置の各々に位置させながら、対象物102の取得部分の一部を現す少なくとも1つの第一フレームを取得する。対象物ホルダ110を各位置に位置させながら、対象物ホルダ110の少なくとも一つの別の面の取得部分を現す少なくとも1つの第二フレームを取得する。取得したフレームのうち少なくとも1つのフレームに基づいて、対象物102の取得部分に関連した少なくとも一つの空間特性を決定する。各第二フレームにおいて取得した複数の光学マーカーの値を決定する。ここで、少なくとも上記光学マーカーのうち少なくとも2つはそれぞれ異なった値を有する。少なくとも一つの異なる面の上記取得部分の値及び向きに関連した少なくとも一つの座標が決定される。
(もっと読む)
物体表面の高さマップを求める方法及びその装置
【課題】より高い速度で物体表面の高さマップを求める方法および装置を提供する。
【解決手段】物体表面の高さマップを求める方法であって、光源の光軸方向に沿って、物体表面に対し対物レンズの焦点面を走査するステップと、その走査中に、前記光軸に垂直な方向に周期性を有する周期的パターンを当該光軸の垂直方向に移動させながら、当該周期的パターンが付与された光を対物レンズを通じて物体表面に照射するステップと、光検出器により前記物体表面で反射した前記光を検出するステップと、その光検出器で検出した光の強度の振幅が最大となる走査位置を特定するステップと、その光の強度の振幅が最大となる走査位置から物体表面の高さを求めるステップと、を有する。光を検出するステップでは、複数の走査位置で当該各走査位置毎に一回ずつ光が検出される。走査の速度と、周期的パターンの位相の移動速度が一定の関係を有する。
(もっと読む)
樹脂フィルム特性評価装置
【課題】延伸中の樹脂フィルムの特性をその場で適切に評価できる樹脂フィルム特性評価装置を提供する。
【解決手段】樹脂フィルムを延伸しつつ、樹脂フィルムの特性を評価する樹脂フィルム特性評価装置であって、樹脂フィルムを2軸以上に同時延伸可能なフィルム延伸手段と、延伸中の樹脂フィルムに対して電磁波を照射する電磁波照射手段と、樹脂フィルムを透過した電磁波を検出する検出手段とを備え、検出手段の検出結果に基づいて樹脂フィルムの特性を評価する。
(もっと読む)
測定装置
【課題】微粒子の接触体を用いて、矩形溝形状を有するマイクロマシン等の三次元形状を高精度で測定する。
【解決手段】接触体6は、可撓性の支持部材5と透明な固定部材4によってプローブ本体9に連結される。対物レンズ3にてレーザ光Gを集光させ、接触体6の底面に焦点を合わせて光放射圧によって接触体6を被測定物13の表面に接触させる。レーザ光Gを音響光学偏向器2によって偏向させることで、接触体6を任意の方向に振動させることができる。被測定物13が矩形溝形状を有する三次元構造体であっても、接触体6の振動方向を調整することで高精度な形状測定を行うことができる。
(もっと読む)
半導体検査装置
【課題】高い空間解像度を有しており、検査に要する時間を短くでき、簡易な構成によって半導体デバイスの異常箇所を特定可能な半導体検査装置を提供する。
【解決手段】半導体検査装置1Aは、DUT17の端子電極にストレス電圧Vsを印加するストレス印加装置22と、シリコン基板17aを透過する波長の光を発生する光源11と、光源11から提供された光をシリコン基板17aに照射し、シリコン基板17aを透過した光に関する干渉像を生成する干渉光学系と、干渉像を撮像して撮像データを生成するIRカメラ19と、撮像データに基づいて、異常発生箇所としてのDUT17の発熱箇所を特定するための情報を演算する演算部21とを備える。ストレス電圧Vsの時間波形は、一定周期の繰り返し波形であって、DUT17の発熱によるシリコン基板17a内部の光学的距離の時間変化を正弦波状とする時間波形である。
(もっと読む)
81 - 100 / 368
[ Back to top ]