
Fターム[2F065MM02]の内容
光学的手段による測長装置 (194,290) | 走査形態 (5,021) | 相対移動によるもの (3,117) | 物体の移動 (2,140)
Fターム[2F065MM02]の下位に属するFターム
Fターム[2F065MM02]に分類される特許
61 - 80 / 368
浸せき試験用自動測定システム
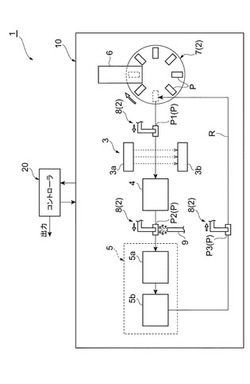
【課題】測定の省力化及びシステム構成の最小化が可能となる浸せき試験用自動測定システムを提供する。
【解決手段】浸せき試験用自動測定システム1は、ゴム試験片Pを自動移送する移送部2と、移送部2によってゴム試験片Pが供給され当該ゴム試験片Pの長さを測定する長さ測定部3と、長さ測定部3による測定後にて移送部2によってゴム試験片Pが供給され当該ゴム試験片Pの気中重量及び水中重量を測定することによりゴム試験片Pの質量及び体積を測定する質量体積測定部5と、移送部2、長さ測定部3及び質量体積測定部5の動作を制御すると共に長さ測定部3及び質量体積測定部5で測定した測定値のそれぞれを取り込んで外部出力するコントローラ20と、を備えている。また、長さ測定部3は、移送部2によるゴム試験片Pの移送中にゴム試験片Pの長さを測定する。
(もっと読む)
欠陥検査方法及び検査装置

【課題】比較的大きなサイズの欠陥を高感度で検出できると共に、高さ又は深さの変化量が1nm又はそれ以下の微細な欠陥も検出できる検査装置を実現する。
【解決手段】照明光源1からの照明ビームを被検査基板21に向けて投射する対物レンズ20と、入射した照明ビームを、互いに干渉性を有する第1及び第2のサブビームに変換すると共に、基板の表面で反射したサブビーム同士を合成し、基板表面の高さ又は深さと関連する位相差情報を含む干渉ビームを出射させる微分干渉光学系16と、出射した干渉ビームを受光する光検出手段28と有する。微分干渉光学系のリターデーション量は、mを零又は正の整数とした場合に、第1と第2のサブビームとの間に(2m+1)π又はその近傍の位相差が形成されるように設定し、前記光検出手段から出力される出力信号のバックグランドの輝度レベルがほぼ零となる検査状態において基板表面を照明ビームにより走査する。
(もっと読む)
形状測定法及び形状計測装置
【課題】 走査型干渉計による非球面測定において、被検非球面の頂点付近反射光を使用せずに被検非球面の走査量を高精度に測定する。
【解決手段】 被検面を多段階にステップ走査し、ステップ走査ごとに、撮像手段にて取得した干渉縞の形状測定領域に対応する位相、及び波長測定器にて前記光の波長、をそれぞれ計測する。
その後、被検面上の任意の点と参照球面の曲率中心との距離を、計測された前記位相と前記波長とをパラメータとして含む波数(整数)の関数として定義したうえで、隣接するステップ間の前記関数の関係から各ステップにおける波数を算出し、各ステップ間の移動量を算出する。
さらに、波数とその関数から被検面上の点Mと参照球面の曲率中心Oとの距離の測定値を算出すると共に、算出された移動量を用いて点Mと曲率中心Oの距離の設計値を算出し、前記測定値と設計値の差分より被検面の形状誤差を算出する。
(もっと読む)
物体の表面プロファイルを測定する方法及び装置
【課題】エッジ(段差)近傍の表面プロファイルの測定結果を正確に取得することができる、物体の表面プロファイルを測定する方法を提供する。
【解決手段】物体の表面プロファイルを測定する方法であって、物体の表面の段差が走査方向に対して延在する第1の方向の情報を取得するステップと、前記情報に応じて、照射ビームに与える位相分布を設定するステップと、前記照射ビームで前記物体を前記走査方向に走査するステップと、を有する。
(もっと読む)
検査装置
【課題】ウエハ検査装置でベアウエハ(鏡面ウエハ)を検査する場合、ウエハ上には何もマークがないため、ベアウエハを正しく位置決めできない。
【解決手段】本発明は、前記基板を移動する搬送系と、前記基板に光を照射する照明光学系と、前記基板からの光を検出する検出光学系と、前記検出光学系の検出結果に基づいて前記基板の欠陥を検出する第1の処理部と、前記検出光学系の検出結果に基づいて画像を取得する第2の処理部とを有し、前記第2の処理部は、前記基板の外周部の画像、及び前記基板のノッチ部の画像を取得し、前記外周部の画像に基づいて、前記基板の中心位置を計算し、前記中心位置、及び前記ノッチ部の画像に基づいて、前記基板の回転ずれを計算し、前記搬送系は、前記中心位置、及び前記基板の回転ずれに基づいて前記基板の位置決めを行うことを特徴とする。
(もっと読む)
スキャナ装置および物体の三次元形状測定装置
【課題】コヒーレント光源を用いて線状パターンの投影を行いつつ、投影面でのスペックルの発生を抑制する
【解決手段】レーザビームL50を、光ビーム走査装置60によって反射させ、ホログラム記録媒体45に照射する。ホログラム記録媒体45には、走査基点Bに収束する参照光を用いて線状散乱体の像35がホログラムとして記録されている。光ビーム走査装置60は、レーザビームL50を走査基点Bで屈曲させてホログラム記録媒体45に照射する。このとき、レーザビームの屈曲態様を時間的に変化させ、屈曲されたレーザビームL60のホログラム記録媒体45に対する照射位置を時間的に変化させる。ホログラム記録媒体45からの回折光L45は、ステージ210の受光面R上に線状散乱体の再生像35を生成する。受光面Rに物体を載置すると、ホログラム再生光により線状パターンが投影されるので、その投影像を撮影して物体の三次元形状測定を行う。
(もっと読む)
セラミック基板の反り検査装置
【課題】反り量を搬送途中で正確に能率よく測定でき、カケの発生を防止するセラミック基板の反り検査装置を提供する。
【解決手段】所定の位置に搬送させる搬送手段と、搬送中のセラミック基板11の全幅を測定対象として通過させながら2次元レーザ変位計12で検出させる検出手段と、検出値を、フィルタを通して整理した反り量を算出させる算出手段とを備え、搬送手段は、セラミック基板11を吸着ヘッド17で吸着して複数の測定テーブル18のそれぞれの上面に連続して載置させるロータリーアクチュエータ13と、測定テーブル18を水平間欠割出回転させながらその上のセラミック基板11の反り量を検出手段と算出手段で測定させるインデックステーブル14と、測定テーブル18の近傍に反り量測定後のセラミック基板11を反り量のランク別に測定テーブル18上から排出させる掻き出し体15を有する。
(もっと読む)
外観検査装置及び外観検査方法
【課題】被検査体の高さを少ない撮像回数で求める。
【解決手段】外観検査装置10は、周期的に明るさが変化する第1縞パターンを異なる複数の位相で被検査体に投射して複数の第1投影画像を撮像する。外観検査装置10は、第1縞パターンとは異なる周期で明るさが変化する第2縞パターンを異なる複数の位相で被検査体に投射して複数の第2投影画像を撮像する。外観検査装置10は、第2縞パターンに対応する被検査体の計測点の明るさ変動の位相を、第1投影画像及び第2投影画像における当該計測点の明るさと、第1縞パターン及び第2縞パターンのそれぞれに対応する明るさ変動の既知の関係とに基づいて求める。
(もっと読む)
リソグラフィ装置及びデバイス製造方法
【課題】センサ読み取り値のエラーのリスクを低減又は解消する。
【解決手段】第1のフロー特性を有する温度調整流体をセンサのビーム経路の少なくとも一部に提供する第1の出口と、第1の出口に関連付けられ、第1のフロー特性とは異なり、第1の出口から放出される温度調整流体の隣にある第2のフロー特性を有する温度調整流体を提供する第2の出口とを有するリソグラフィ装置。
(もっと読む)
法線ベクトル追跡型超精密形状測定方法
【課題】
計測点の座標と法線ベクトルの計測値から被測定物の表面形状を導出し、各軸の制御方法を工夫することによって各計測点での計測時間を短縮し、被測定物の表面形状測定の高速化と高精度化を図ることが可能な法線ベクトル追跡型超精密形状測定装置における駆動軸制御方法を提供する。
【解決手段】
2軸2組のゴニオメータと1軸の直進ステージの内、2軸1組のゴニオメータと1軸の直進ステージは、QPDからの出力を直接軸駆動モータに入力するフルクローズドフィードバック制御(追従制御)にするとともに、残り2軸1組のゴニオメータはセミクローズドフィードバック制御(定値制御)とし、各軸のエンコーダ出力とQPD出力とを同時に取得し、前記エンコーダ出力から導出する計測点座標と法線ベクトルをQPD出力で補正して、ゴニオメータ制御系の定常偏差の影響を排除する。
(もっと読む)
検出条件最適化方法、プログラム作成方法、並びに露光装置及びマーク検出装置
【課題】アライメントマークの検出条件を最適化する。
【解決手段】アライメント検出系を用いてウエハ上に形成されたアライメントマーク(EGAマーク又はサーチマーク)が複数の照明条件及び結像条件で検出される。しかる後、得られた検出信号を信号処理アルゴリズムを用いて解析処理し、検出信号の波形の形状に関する判定量が求められ(ステップ302〜310)、その判定量に基づいて複数のマークの検出結果の再現性が評価される(ステップ312)。そして、その解析結果に基づいて複数の照明条件及び結像条件が最適化される(ステップ314)。これにより、検出結果の再現性を向上するようにアライメントマークの検出条件を最適化することが可能になる。
(もっと読む)
寸法測定装置、寸法測定方法及び寸法測定装置用のプログラム
【課題】 複数のワークについて、相対的な位置関係を把握し易く、測定結果を容易に識別することができる寸法測定装置を提供する。
【解決手段】 特徴量情報、測定対象箇所情報及び設定値情報を保持する測定設定データ記憶部21と、ワークの位置及び姿勢をそれぞれ検出する配置状態検出部24と、ワーク画像A1から測定対象箇所のエッジを抽出するエッジ抽出部24と、抽出されたエッジに基づいて測定対象箇所の寸法値を算出し、測定対象箇所及びワークの良否判定を行う良否判定部25と、ワークの良否判定の結果をワーク画像A1上に表示する測定結果表示手段と、ワークのいずれかを選択するためのワーク選択部27により構成される。測定結果表示部26は、選択されたワークについて、測定対象箇所の良否判定の結果を表示する。
(もっと読む)
電子部品実装装置
【課題】撮像による画像データを用いてより高精度な実装対象の電子部品の外部情報を取得する。
【解決手段】部品配置部に配置された電子部品を撮像する撮像手段1と、部品配置部と撮像手段との距離を可動調節する可動部111と、これらを制御して、電子部品について部品配置部と撮像手段の距離が異なる複数の画像データを取得する撮像制御部120と、各画像データの同一画素におけるコントラストの対比に基づいて、当該各画素における撮像手段から部品配置部の合焦点位置を求める測距処理部23と、撮像エリア内の各画素における合焦点位置と、各画像データにおける各画素の輝度値とから、撮像エリアの一部の範囲内の画素における合焦点位置での輝度値を求め、局所全焦点画像を生成する全焦点画像生成部25とを備えている。
(もっと読む)
移動体制御システム、プログラム、及び移動体制御方法
【課題】複数の撮像部が撮像したそれぞれの画像に基づいて移動体を制御する移動体制御システムにおいて、それぞれの撮像部に対して定められたそれぞれの撮像座標系の対応関係の精度を向上させる。
【解決手段】第1回転中心位置特定部62がそれぞれの第1画像に含まれるそれぞれの第1基準目印に基づいて、第1撮像座標系における第1点に対応する第1回転中心位置を特定する。第2回転中心位置特定部64がそれぞれの第2画像に含まれるそれぞれの第2基準目印に基づいて、第2撮像座標系における第1点に対応する第2回転中心位置を特定する。座標系対応関係保持部66が第1回転中心位置及び第2回転中心位置に基づく第1撮像座標系及び第2撮像座標系の対応関係を示す座標系対応関係を保持する。
(もっと読む)
変位検出回路
【課題】荷電粒子線が照射される位置の安定性を容易に評価することができる変位検出回路を提供する。
【解決手段】ヘテロダイン干渉計と、該ヘテロダイン干渉計の基準信号と測定信号のそれぞれの光ビート回数をカウントするデジタルカウンタと、前記基準信号と前記測定信号との差分をとる減算器と、前記基準信号の波形の位相をシフトさせる位相シフト回路と、該位相シフト回路で位相シフトされた位相シフト信号の波形から特定の1つの信号波形を選択するスイッチ回路と、前記基準信号と前記測定信号との位相差を検出するゲートと、該ゲートの出力からヘテロダイン周波数の信号を取り除くローパスフィルタと、を構成とする。
(もっと読む)
情報処理装置およびその動作方法
【課題】 接触を検知するペンや画面を用いることなく、ペンと画面との接触による入力を検知することが困難であった。
【解決手段】 上記の課題を解決するために、本発明の情報処理装置は、表示面に画像を表示し、距離画像センサを用いて、所定の形状をもつ物体の三次元空間における位置を特定し、前記表示面と接する面に前記物体が存在するかを判定し、前記表示面と接する面に前記物体が存在すると判定されたことを、前記表示面の前記特定された位置に表示された部分に対する入力として認識する。
(もっと読む)
走査型プローブ顕微鏡の変位検出方法
【課題】 測定対象が変わっても測定対象の反射率などの光学特性、あるいは形状や機械的特性に依存せずに検出感度やノイズの割合が調整可能で、測定対象への照射光による測定対象の熱変形の影響が小さくでき、最適な条件下で測定精度を確保することが可能な光学式変位検出方法を提供する。
【解決手段】 測定対象となるカンチレバー6に光を照射する光源10と、光源10を駆動する光源駆動回路21と、光源10からカンチレバー6に照射した後の光を受光し、光強度を検出する光検出器16と、光検出器16の検出信号を所定の増幅率で増幅する増幅器22から構成される光学式変位検出機構において、光強度調整器28と増幅率調整器27を設けカンチレバー6への照射光強度や光検出器16の増幅率を調整できるようにした。
(もっと読む)
TCPハンドリング装置
【課題】インデックスタイムを効果的に短縮することのできるTCPハンドリング装置を提供する。
【解決手段】TCPハンドリング装置1において、キャリアテープにおける露光単位マーク54を取得する第2カメラ6bと、TCPの外部端子およびコンタクト部の接続端子が正しく接続するように、位置ずれ補正を行うプッシャステージ4とを設ける。取得した露光単位マーク54の画像情報に基づいて、試験部に新たな露光単位が位置したと判断したときに、プッシャステージ4は位置ずれ補正を行い、位置ずれ補正を行った後、次の露光単位が試験部に位置すると判断するまでは、コンタクト不良となる以外、プッシャステージ4は位置ずれ補正を行わない。
(もっと読む)
形状計測装置およびキャリブレーション方法
【課題】計測点の位置の違いによる法線算出の誤差を可及的に小さくし、計測対象物の3次元形状を精度良く算出するための技術を提供する。
【解決手段】形状計測装置は、カメラ1で撮像を行うことにより得られた画像から、計測対象物4の表面上の複数の注目点について特徴量を算出し、記憶装置62に予め記憶されているデータを参照して特徴量の値から法線の向きを算出し、その算出結果から計測対象物4の表面の3次元形状を復元する。ここで、記憶装置62は、カメラ1の視野内に設定された複数の基準位置のそれぞれについて作成された複数のデータを記憶しており、注目点の位置に応じて参照するデータが切り替えられる。
(もっと読む)
方向検出装置
【課題】移動体の進行方向を、簡易な構成で検出する方向検出装置を提供する。
【解決手段】投光部2を間に挟んで受光部3,4を配置して、受光部3,4が移動体10の有無を示すON/OFF出力を行う。方向判定部6が、受光部3,4のON/OFF出力の経時変化に基づいて、移動体10の進行方向が受光部3から受光部4の方向か、又は受光部4から受光部3の方向かを1次元で検出する。
(もっと読む)
61 - 80 / 368
[ Back to top ]