
Fターム[2F065QQ00]の内容
光学的手段による測長装置 (194,290) | 信号処理 (28,761)
Fターム[2F065QQ00]の下位に属するFターム
サンプリング (206)
ピークホールド (43)
A/D変換、多値化 (3,603)
信号の遅延 (75)
信号の微分、差分 (1,068)
信号の積分 (316)
フーリエ変換;逆フーリエ変換 (544)
近似式(例;多項式近似) (1,899)
形状特定のためのパラメータ抽出 (463)
信号の記憶 (4,476)
信号の比較、減算 (4,276)
信号の加算 (639)
信号の特定位置の検出 (2,005)
画像処理(1次元を含む) (5,599)
統計処理 (2,372)
ゲート手段の利用 (33)
カウンター (263)
Fターム[2F065QQ00]に分類される特許
281 - 300 / 881
3次元物体認識装置、並びに3次元物体認識プログラム及びこれが記録されたコンピュータ読み取り可能な記録媒体
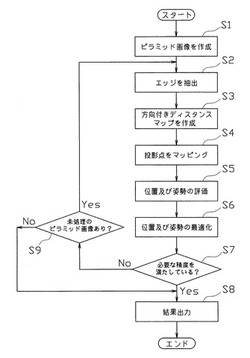
【課題】 2次元画像における輪郭などの特徴から3次元物体を認識する3次元物体認識装置において、隠れの影響を排除してロバスト性を向上させるとともに、位置及び姿勢を最適化して認識精度を高める手段を提供する。
【解決手段】 本発明に係る3次元物体認識装置は、3次元物体を撮影するカメラと、3次元物体の位置及び姿勢を変化させながらカメラ画像に投影し、各投影点の座標及びエッジの向きを算出する手段と、それに基づいて作成したルックアップテーブルを記憶する手段と、ピラミッド画像を作成する手段と、解像度が最も低いピラミッド画像についてエッジを抽出する手段と、方向付きディスタンスマップを作成する手段と、方向付きディスタンスマップ上に各投影点をマッピングする手段と、位置及び姿勢を評価する手段と、位置及び姿勢を最適化する手段と、を備えるものである。
(もっと読む)
三次元形状測定方法及び三次元形状測定装置

【課題】精度良くかつ簡易なキャリブレーションによる三次元形状計測を実現する。
【解決手段】 位相シフト法により三次元形状を求める場合において投影部及び撮像部からの距離が既知の位置に基準平板を配して位相の異なる複数の格子縞を投影し、撮像画像から各画素の位相を算出し、算出した位相と既知の距離とから位相−距離関係を算出する。また距離が既知の位置に、距離方向に直交する平面上での2次元座標が既知の基準グリッドを有する基準グリッド平板を配し、基準グリッドに基づいて撮像画像の各画素の二次元座標を算出し、算出した各画素の二次元座標と既知の距離とから距離−二次元座標関係を算出する。実測定時には所定距離の位置に被測定物を配し、位相の異なる複数の格子縞を投影し、撮像画像の各画素の位相を算出し、位相−距離関係に基づいて距離を算出し、距離−二次元座標関係に基づいて画素の二次元座標を算出し、被測定物の三次元形状を求める。
(もっと読む)
画像相関装置及びコンピュータプログラム及び画像相関方法
【課題】二つの画像の間の対応する範囲を判定する。
【解決手段】画素評価算出部111は、対象画素の輝度と、隣接画素の輝度とを比較して、評価値を算出する。評価合致算出部131は、対象範囲設定部122が選択した対象範囲内の画素の評価値と、候補範囲選択部123が選択した候補範囲内の画素の評価値とを比較して、評価合致数を算出する。合致合計算出部132は、評価合致数を合計して、合致合計数を算出する。画像相関判定部140は、合致合計数に基づいて、候補範囲が対象範囲に対応するか否かを判定する。
(もっと読む)
形状測定装置,形状測定方法
【課題】薄板状の被測定物の厚み分布の測定において,簡易な装置構成により,被測定物の振動の影響を受けずに高精度で厚み分布の測定を行うことができること。
【解決手段】被測定物1の表裏各面について,レーザ光源2の出射光を2分岐したビーム光をさらに2分岐させて参照面及び表裏相対する測定点1a,1bに反射させ,参照光と物体光とを直交する偏光成分とする非干渉光Pax,Pbxを得て,それを複数に分岐させ,分岐光のうちの1つ以上について波長板a261,a263,a264等で直交する偏光成分の位相差に変化を与えて位相シフトを行い,位相シフト後の分岐光における参照光及び物体光の偏光方向を基準とする共通の偏光成分の抽出により干渉光Qa1〜Qa4,Qb1〜Qb4を得て,それらの強度から前記非干渉光における前記参照光及び前記物体光の偏光成分の位相差を算出し,その位相差の分布から被測定物1の厚み分布を算出する。
(もっと読む)
荷電粒子ビーム描画装置及び荷電粒子ビーム描画方法
【課題】ステージ制御により生じる機械振動成分を除去することなく、レーザ干渉計の測定信号に含まれる非線形誤差成分を最大限除去することが可能な荷電粒子ビーム描画装置及び荷電粒子ビーム描画方法を提供する。
【解決手段】試料が載置されるステージの位置の測定にレーザ干渉計を用いる。レーザ干渉計の測定信号に含まれる非線形誤差成分を除去するフィルタ部のカットオフ周波数を、ステージの加速度のデジタル制御の周期Taの逆数(1/Ta)に設定する。
(もっと読む)
計測装置、露光装置及びデバイスの製造方法
【課題】光源からの光の光量ばらつきの影響を低減して、被計測面の表面形状を高精度に、且つ、再現性よく計測することができる技術を提供する。
【解決手段】計測面の表面形状を計測する計測装置であって、光源からの光を計測光と参照光とに分離し、計測光を被計測面の表面に入射させ、参照光を参照面に入射させる光学系と、被計測面の表面で反射した計測光の光強度と、参照面で反射した参照光の光強度と、被計測面の表面で反射した計測光と参照面で反射した参照光との干渉パターンとを検出する検出部と、検出部によって検出された干渉パターンの干渉信号に基づいて、被計測面の表面形状を算出する処理部と、を有し、処理部は、検出部によって検出された計測光の光強度、及び、参照光の光強度に基づいて、検出部によって検出された干渉パターンの干渉信号に含まれる光源からの光の光量ばらつきによる影響を低減して、被計測面の表面形状を算出する。
(もっと読む)
撮像装置を用いた変状計測システム
【課題】工事に伴い影響する地盤を介して近接する高架橋構造物やトンネル構造物等に影響が波及することを監視するためのものであり、鉛直方向の変位はもとより高架橋構造物の横移動や傾きを計測できる撮像装置を用いた変状計測システムを提供する。
【解決手段】本発明は、計測範囲外にある構造物に撮像装置を設置し、該撮像装置が撮像する計測ポイントを計測範囲内にある構造物の最初の計測点に設置し、該最初の計測点又は次の計測点或いはその次に続く計測範囲内にある計測点にそれぞれ撮像装置と該撮像装置が撮像する計測ポイントを設置することを特徴とし、画像化した計測ポイントの形状又は位置の差(ズレ)によって各計測点の変状が即時に判定できる。さらに、前記計測ポイントが前記撮像装置の光軸に対して斜交した方形面になっていると、撮像装置が画像化した計測ポイントの画像のズレをより計測し易くなる。
(もっと読む)
表面形状測定方法およびこれを用いた装置
【課題】平面上の凹凸段差、曲面などが混在する測定面を有する測定対象物の表面高さおよび表面形状を高速かつ精度よく求める。
【解決手段】干渉縞を発生させて撮像した測定対象物の表面画像において、明部と暗部の組みからなる干渉縞の一周期ごとに輝度レベルが最大の画素と輝度レベルが最小の画素を選択する。選択された各画素の光の強度値とその近傍の画素の強度値を利用し、各画素に含まれる干渉縞波形の直流成分、交流振幅、および位相が等しいと仮定、位相を求め、高さを求める。この高さから測定対象物全体の高さを補間で求め、表面高さ、および表面形状を求める。
(もっと読む)
球形物体の飛行情報測定システム及び方法(SYSTEMANDmETHODFORmEASURINGFLIGHTPARAMETERSOFASPHERICALOBJECT)
球形物体の飛行情報測定システム及び方法が開示される。トリガー信号生成部は球形物体が検出されると、第1トリガー信号を生成して出力し、第1トリガー信号の生成時点から球形物体の最大飛行速度及び最大回転速度に基づいて設定された基準時間間隔が経過すると、第2トリガー信号を生成して出力する。撮影部は、所定面積を有する第1映像獲得領域に対して球形物体が存在する映像を第1トリガー信号及び第2トリガー信号のそれぞれに対して複数撮影する。映像獲得部は、トリガー信号生成部から入力された第1トリガー信号及び第2トリガー信号を撮影部に提供し、第1トリガー信号及び第2トリガー信号のそれぞれに対応して撮影部から入力された複数の映像をデジタル映像に変換して貯蔵する。情報測定部は、複数のデジタル映像から球形物体の飛行速度、飛行角度、回転速度及び回転軸を含む飛行情報を算出する。
 (もっと読む)
(もっと読む)
検査装置及び検査方法
【課題】検査中の高速回転のウェーハに対して、リアルタイムでその反り量を検出する。
【解決手段】被検査体1に光を照射する第一の光照射部600と、該被検査体1からの散乱光を検出する第一の検出器770と、前記被検査体1に光を照射する第二の光照射部920と、前記第二の光照射部920の光によって前記被検査体1から反射した光を検出する第二の検出器910と、前記被検査体を移動させる被検査体移動ステージ410と、前記光が照射される位置の位置座標の情報を出力する検査座標検査部450と、前記第二の検出器910からの検出信号に基づいて前記被検査体1の高さ情報を出力する昇降駆動制御回路940と、前記検査座標検査部450からの位置座標の情報と前記昇降駆動制御回路940からの高さ情報に基づいて前記被検査体1のそり量を算出するデータ処理部500を備えた。
(もっと読む)
3次元モデリング装置
【課題】3次元モデリングを容易に実現する。
【解決手段】物体までの距離を計測し、モデリング用のデータを取得する第1のセンサと、物体までの距離を計測し、平面位置推定用のデータを取得する第2のセンサと、第1のセンサの上下方向に移動させる上下移動機構と、3次元モデリング装置を移動させる移動機構と、モデリング対象場所の地図データを格納するデータベースを備える計算機と、を備える。計算機は、第2のセンタから取得したデータと地図データとを照合して第1のセンサの平面位置を推測し、上下移動機構による第1のセンサの垂直位置及び推測された第1のセンサの平面位置から第1のセンサの3次元位置を取得し、第1のセンサが取得した複数のモデリング用のデータを、取得された3次元位置に応じて統合し、3次元モデルを出力する。
(もっと読む)
エンジンマウントの変位量計測方法、及び、エンジンマウントの変位量計測装置
【課題】高速な振動現象の下にあっても、エンジンマウントのマウント軸として配設されるボルトの中心の3軸並進量、及び、該ボルトの2軸回転量を高精度に算出することができる、エンジンマウントの変位量計測方法、及び、エンジンマウントの変位量計測装置を提供する。
【解決手段】エンジンマウントの変位量計測方法は、エンジンマウント10のマウント軸であるボルト12の両端に固定した2個の球体13・13の変位を、それぞれの球体13・13について4箇所ずつレーザー変位計31で計測する球体変位計測工程と、球体変位計測工程で計測した球体13・13の変位結果に基づいて、球体13・13の中心I・Jの3次元座標X1・X2をそれぞれ算出する座標算出工程と、座標算出工程で算出した2個の3次元座標X1・X2に基づいて、ボルト12の中心Kの3軸並進量、及び、ボルト12の2軸回転量θ・φを算出するマウント軸変位算出工程とを備える。
(もっと読む)
周波数走査型干渉計による多重表面検査対象物の測定
周波数走査型干渉計(10)が検査対象物(12)の広い推定オフセット範囲にわたる多重表面(14,15,16)を同時に測定するために構成される。合成測定波長(λ実効)に基づくアンビギュイティインターバル(U)内の中心に検査表面をおくために、検査表面の推定位置の知見が一連のアンビギュイティインターバルと比較される。  (もっと読む)
(もっと読む)
形状測定装置
【課題】高い測定精度を有する形状測定装置を提供する。
【解決手段】形状測定装置100は、被測定物体15の形状を測定して測定値を出力するプローブ12と、所定の空間内でプローブ12を移動させる移動機構部であるアーム部11に、プローブ12を着脱する取付部16と、空間内におけるプローブ12の空間座標を測定する空間座標測定部30と、プローブ12により測定された被測定物体15の測定値を、空間座標測定部30により測定されたプローブ12の空間座標により補正する制御部20,50と、を有して構成される。
(もっと読む)
信号処理装置及び計測装置
【課題】
安価で信頼性の高い信号処理装置を提供する。
【解決手段】
本発明の信号処理装置は、被計測物の位置を計測する計測装置に用いられる信号処理装置1であって、被計測物の位置に応じた信号の位相を時間に対して回帰することにより、被計測物の速度を算出する回帰演算器19と、第1のサンプリング時における被計測物の位置に回帰演算器19で算出された速度を加算することにより、第2のサンプリング時における被計測物の予測位置を求める予測演算手段(加算器22)と、位相演算手段で求められた第2のサンプリング時の計測位相から予測位置を減算して予測誤差を求める誤差演算手段(減算器23)と、桁拡張した予測誤差を予測位置に加算することにより、第2のサンプリング時における被計測物の位置を求める位置演算手段(加算器21)とを有する。
(もっと読む)
内面形状測定装置および内面形状測定方法
【課題】より簡単な構成で高精度の内面形状測定ができると共に、測定対象の内面形状が複雑な形状であってもより確実に測定を行い得る内面形状測定装置および内面形状測定方法を提供する。
【解決手段】2台の撮像装置15,16により、ビーム発射手段(11,12)が発射する放射状光ビーム18が被測定物40の内面41に照射されてできる光跡を撮像し、演算処理装置30により、撮像装置15,16による光跡撮像画像と、ビーム発射手段および2台の撮像装置15,16の相対的位置関係とに基づき、ビーム発射手段の光学中心(基準位置)と被測定物40の内面41との距離を算出する。
(もっと読む)
立体物イメージスキャナ
【課題】 立体物のイメージスキャナにおいて大きい立体物の全体像を良好な画質で取得する。
【解決手段】 スキャニングユニット24は、リニアイメージセンサとテレセントリック結像系を内蔵し、前方の鉛直な線状のターゲット平面領域48にピントが合っている。鉛直で線状の2本の光源34A、34Bがスキャニングユニット24の左右両側に配置され、ターゲット平面領域48を照明光する。光源34A、34Bの全箇所からの照明光の鉛直面に沿った出射角度が規制され、それにより、ターゲット平面領域48の全箇所にて、照明光の鉛直面に沿った入射角と光量が一定にされる。スキャニングユニット24と光源34A、34Bが一緒にX、Y、Z方向に移動して、被写体の空間15を多数のレイヤとバンドに分割してスキャンする。スキャンで得た画像データからピントの合った画素が抽出され合焦点画像が合成される。
(もっと読む)
分光検出方法及びその装置並びにそれを用いた欠陥検査方法及びその装置
【課題】
分光検出手法を用いて検査対象表面に一様に形成された繰り返しパターンの形状を検出するには、分光検出する波長範囲が、短い波長領域に広いことが有利である。しかし、短い波長領域すなわち紫外領域を含む広い波長範囲で分光検出可能な光学系を比較的簡単な構成で実現することは容易ではない。
【解決手段】
パターン欠陥を検査する装置を、ハーフミラーとして空間的に部分的なミラーを用い、また検査対象へ光の照射および検査対象からの反射光の検出の角度及び方向を制限するための開口絞りを反射型対物レンズ内に設置することにより、深紫外から近赤外までの波長帯域で検出可能な分光検出光学系を備えて構成した。
(もっと読む)
光学レンズの縁を計測するための方法および装置
【課題】レンズの縁の迅速かつ正確な計測が保証される方法及び装置を提供する。
【解決手段】光学レンズ1の縁1.1上の1つの点P1の座標Kを測定する方法であり、レンズ1は、保持装置3により保持され、光路2.1は、Z軸方向で計測する光学マイクロメータ2のY軸方向に延びており、保持装置3とマイクロメータ2との間の相対位置が既知であり、a)縁1.1が光路2.1内でにある状態でレンズ1が保持され、b)位置Aに位置決めされた縁1.1の点P1について第1のZ座標Zaが測定され、点P1のX座標Xaが光路2.1のY−Z平面のX座標に対応しており、c)レンズ1と光路2.1との間の相対位置の変化が保証され、d)光路2.1内における縁1.1の点P1について、第2のZ座標Zbが測定され、e)2つの相対位置における点P1についての2つの連立方程式に基づいて、欠けている座標およびが、従って点P1の位置が測定される。
(もっと読む)
2トローク・クロスヘッド内燃エンジンのシリンダライナの直径を測定する方法、直径測定装置、および、前記方法に用いる可撓性リング
【課題】2ストローク・クロスヘッドエンジンが一時的に非作動状態にある間に、シリンダライナの直径を測定する方法およびその方法で使用される直径測定装置を提供する。
【解決手段】シリンダライナの直径を測定する電子的な直径測定装置10は、掃気ポート103を介して内燃エンジンのシリンダライナ106の内側に挿入されて測定位置に配置され、シリンダライナ106の内径を電子的なパラメータとして測定する。
(もっと読む)
281 - 300 / 881
[ Back to top ]