
Fターム[2F069GG07]の内容
測定手段を特定しない測長装置 (16,435) | 測定方式 (4,762) | 光学的手段を利用するもの (753)
Fターム[2F069GG07]に分類される特許
21 - 40 / 753
角型電池の外形測定装置
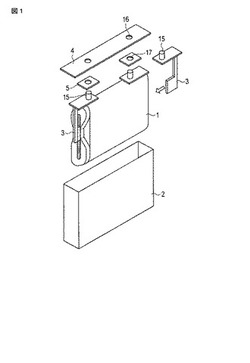
【課題】測定値のばらつきが小さく精度の良い角型電池の外形測定装置を得る。
【解決手段】電池7の垂直方向の外周面を把持しかつ7の水平方向の位置決めを行い、かつ電池姿勢を垂直に位置決めする側面位置決め機構22と、7の水平方向の外周面に当設可能であって7の水平面の垂直方向の位置決めをする水平面位置決め機構23と、搬送治具8に7を載置面から切り離す手段20を備え、7の垂直方向の外形を測定する際に、22により7の水平方向の位置決めと姿勢を垂直に位置決めし、かつ20により載置面から7を切り離した状態で、垂直方向外形測定手段12により7の垂直方向の外形を測定し、7の水平方向の外形を測定する際に、23により7の垂直方向の位置決めをし、かつ20により載置面から7を切り離した状態で、水平方向外形測定手段13により7の水平方向の外形を測定する角型電池の外形測定装置。
(もっと読む)
有関節座標計測機再配置方法、および有関節座標計測機用レトロリフレクタアセンブリ

【課題】隠れ点を計測できるという有関節CMMの便利さと、より広い空間を計測できるというレーザトラッカの利点とを併せ実現することを目的とする。
【解決手段】対象物の周囲での再配置を容易化する計測装置、システム及び方法を提供する。本システムでは有関節座標計測機(CMM)(200)及びレーザトラッカ(400)を使用し、そのCMM上にはレーザトラッカと対をなすレトロリフレクタ(310,312)を配置する。共通の基準座標系による座標値にCMMによる計測値及びレーザトラッカによる計測値を変換できるためCMMを移動させることができる。更に、レーザトラッカでは計測できない隠れ点を有関節CMM等で計測することができる。
(もっと読む)
光学センサ付きの表面検出装置
【課題】スタイラスの変位を正確に測定すること。
【解決手段】位置測定装置に用いる表面検出装置は、測定すべきワークピースの表面を走査するためのチップ82をもつ長いスタイラス74を有する。スタイラスチップの横変位は、光源66から逆反射体(retroreflector)78にスタイラスに沿って通過するライトビームによって測定される。これは、ビームを反射して、ブームスプリッタ70を介して位置高感度検出器76に戻す。スタイラスは、キャリッジ72に縦変位のために設置される。その縦変位は、ビームスプリッタ70によって、第2の位置高感度検出器84に投光される他のライトビームによって測定される。
(もっと読む)
被較正疑似品
【課題】関節プローブヘッドを較正するための被較正疑似品を提供する。
【解決手段】座標位置決め機械のアームに関節プローブヘッドが取り付けられたときに前記関節プローブヘッドを較正するための被較正疑似品100であって、前記関節プローブヘッドを前記座標位置決め機械の前記アームに対し関節動作させることによりスキャンされることが可能な、異なる寸法の複数の輪郭102、104、106と、前記複数の輪郭102、104、106を、前記座標位置決め機械の異なる方向に沿って向けることができるよう、前記複数の輪郭102、104、106の向きを変えるための割り出し装置と、を備える被較正疑似品100。
(もっと読む)
シート長計測装置及び画像形成装置
【課題】用紙が搬送される際のバタツキを抑えた状態で用紙の通過を検出することで、シート長の計測精度を高める。
【解決手段】搬送されるシートPの搬送量を計測する搬送量計測手段15と、前記シートの搬送をガイドするガイド部材31a,31b,32a,32bと、前記シートの搬送方向における下流側で、前記ガイド部材に沿って搬送される前記シートの先端部通過を検知する先端検知手段11と、前記シートの搬送方向における上流側で、前記ガイド部材に沿って搬送される前記シートの後端部通過を検知する後端検知手段12と、を有し、前記先端検知手段、前記後端検知手段及び前記搬送量計測手段の出力に基づいて、前記シートの搬送方向の長さを算出するシート長計測装置100であって、前記先端検知手段及び前記後端検知手段が前記シートの端部通過を検知する領域において、前記シートを前記ガイド部材に密着させるエア吐出手段又はエア吸引手段を備える。
(もっと読む)
金属試料を測定する膨張計
【課題】温度に依存する長さの変化を正確に測定することができる膨張計を提供する。
【解決手段】試料3を固定することのできる試料ホルダ4、14と、試料3を加熱するために試料3に配置される少なくとも1つの誘導コイル5と、試料3の温度を測定する少なくとも1つのセンサとを備える、金属試料3を測定する膨張計1であって、試料3の長さの変化を検出する光学測定装置6、9が備えられている。これにより、温度に依存する、試料の長さの変化を正確に測定することができる。
(もっと読む)
モーションキャプチャ装置およびモーションキャプチャプログラム
【課題】被測定者の動作の制約が少ない状態で舌の動きを計測することができるモーションキャプチャ装置およびモーションキャプチャプログラムを提供する。
【解決手段】モーションキャプチャ装置1は、被測定者Mの舌表面に貼付される磁気ソース10と、被測定者Mの顔表面に貼付され、磁気ソース10によって形成される磁場を検出する磁気センサ40と、被測定者の顔表面に貼付された磁気センサ40と同一の位置に配置された光学マーカ41と、光学マーカ41を異なる位置および異なる方向から撮影する複数の撮影装置60と、磁気センサ40によって検出された磁場の大きさと、撮影装置60によって撮影された光学マーカ41の画像とから、被測定者Mの舌表面に貼付された磁気ソース10の絶対座標を算出する座標算出手段70と、からなる。なお、磁気ソース10と磁気センサ40の位置は入れ替えてもよい。
(もっと読む)
3次元寸法測定方法
【課題】タービンロータやタービンケーシングの寸法を、短時間に、高精度で、特別な能力を有することなく測定することが可能な寸法測定方法を提供する。
【解決手段】上記目的を達成するために、本発明は、計測対象を、円筒、平面、および、曲面形状に分割し、円筒、平面、および、曲面形状を含む全体形状をレーザ式3D計測機で、円筒、および、平面形状をレーザ追尾式ハンディー接触式計測機で、また、局所的な曲面形状をレーザ追尾式ハンディー非接触式計測機により用いて計測する。この際、円筒、および、平面形状は、N点計測した結果から求めることで、少量の取得データから形状を測定することが可能となり、データ取得時間のみならずデータ処理時間も大幅に短縮する。
(もっと読む)
長さ測定装置
【課題】高い測定精度を備える良好に操作可能で安定した長さ測定機を提供する。
【解決手段】スケール3が中空成形部材4内に保護されるように配設されたカプセル化された長さ測定装置において、基準点を構成するため、固定要素10が設けられ、この固定要素が、一方で、スケールを固定装置10に位置不動に固定し、他方で、測定すべき対象1に位置不動に固定可能であり、固定要素10が、更に、固定要素10を測定方向Xに移動可能に中空成形部材4内に固定する少なくとも1つの長さ補正要素を備え、この少なくとも1つの長さ補正要素が、特に、測定方向Xの補正運動だけを可能にする固体ジョイント131,132の装置の形態に形成されている。
(もっと読む)
足の診断装置およびそれを用いた靴またはインソールのフィッティング・ナビゲーション・システム
【課題】足底圧の計測において荷重が検出されない欠損部分がある場合でも足底の重心バランスの偏りを常に精度よく判定できる足の診断装置およびそれを用いた靴またはインソールのフィッティング・ナビゲーション・システムを提供する。
【解決手段】足底圧の圧力分布を計測する足底圧計測センサ20、足を撮像するテレビカメラ30、処理装置40を備え、足底圧データ取得部41により足底圧データを取得し、足画像取得部42により足画像を取得し、足外形寸法演算部44により足の外形位置を検出して足の外形寸法を演算し、足底重心位置演算部43により、検出された足の外形位置を基準とした足底重心位置を演算し、重心バランス判定部45により足底重心位置と足外形寸法とに基づいて重心バランスの偏りを判定する。また、足の症状判定部46により足の症状を判定し、選定部47により重心バランスの偏りと足の症状に基づいて靴またはインソールを選定する。
(もっと読む)
ワーク保持装置及び、このワーク保持装置を備えた3次元形状測定装置
【課題】精密なワークでも保持可能なワーク保持装置及びこのワーク保持装置を使用した3次元形状測定装置を提供する。
【解決手段】ワーク保持装置3は、ワークWを保持する回転ヤトイ31と、ベース部材32と、回転昇降機構33と、を有する。回転昇降機構33は、支持部34を上昇させ回転ヤトイ31の背面31Rと接触させ、この回転ヤトイ31をベース部材32から浮かせた状態で回転させる。また、支持部34を下降させ、回転ヤトイ31をベース部材32に着座させた状態でワークWの測定を行う。
(もっと読む)
定形体群の立体配置状況解析方法
【課題】定形体群の立体的な配置を高精度に把握することができ、これにより定形体群の断面解析、時差比較解析などを高精度に行える定形体群の立体配置状況解析方法を提供する。
【解決手段】定形体群へ測定波を発し、3次元多点群と多数の3次元ポイントデータとを取得し、次に、3次元多点群を構成する3次元ポイントデータの中から定形体と推定される領域を順次抽出し、その後、あらかじめ取得した3次元定形体モデルを、抽出した定形体の推定領域に、画像サイズと位置とを3次元的に一致させて順次挿入する。全挿入後、定形体群の3次元CGを3Dディスプレイまたは2Dディスプレイに立体表示するので、定形体群の立体的な配置を測定誤差の影響を小さくして高精度に把握でき、定形体群の断面解析、時差比較解析などを高精度に行える。
(もっと読む)
鋼管湾曲量測定装置及びその方法
【課題】容易かつ高精度に、鋼管の湾曲量を測定することが可能な鋼管湾曲量測定装置を提供する。
【解決手段】鋼管湾曲量測定装置2は、レーザ光照射装置20を保持し、鋼管10の表面に固定して配置する固定側保持体21と、目盛りMを付したスケール部材22を保持し、鋼管10の表面上を軸方向に移動させて所定の測定位置に配置する移動側保持体23とを備える。固定側保持体21と移動側保持体23は、鋼管10の外周面に当接した際に鋼管10の当接した箇所の軸方向に対する向きが特定の一の向きとなる形状に構成されている。固定側保持体21と移動側保持体23とを鋼管10の外周面に当接させた状態で、レーザ光照射装置20の光軸Aの方向、及びスケール部材22の目盛りMの臨む方向が、それぞれ鋼管10の前記当接した箇所の軸方向と平行になるように保持する。
(もっと読む)
シート状材料の厚さ測定方法およびシート状材料の搬送装置
【課題】コストを抑えたシート状材料の厚さ測定を行うことを可能としたシート状材料の厚さ測定方法およびシート状材料の搬送装置を提供する。
【解決手段】搬送ベルト12は、シート状材料2の搬送方向と直交する方向に2つに分割された第1、第2の搬送ベルト1202、1204で構成されている。第1、第2の搬送ベルト1202、1204の間には間隙Sが確保されている。シート状材料2は第1、第2の搬送ベルト1202、1204により搬送される。第1、第2の変位センサ16、18は、非接触式であり、第1の搬送ベルト1202と第2の搬送ベルト1204との間隙Sの領域内に位置するシート状材料2の上下に離間して配置され、シート状材料2の上面および下面の変位を検出する。厚さ算出手段20は、第1、第2の変位センサ16、18で検出された上面および下面の変位に基づいてシート状材料2の厚さを算出する。
(もっと読む)
電極厚さ変化測定装置
【課題】充放電時における正極および負極それぞれの厚さ変化を個別に測定することができる電極厚さ変化測定装置の提供
【解決手段】本発明に係る電極厚さ変化測定装置100は、充放電時における正極または負極の厚さ変化を測定する装置であり、第一硬質平板1と、第一電極2と、測定電極台座3と、第二電極4と、第二硬質平板(電極押さえ)5とを順に積層した積層体を電解質と接触する状態で密閉した電極厚さ変化測定用セル10と、第一電極に荷重を付加する荷重負荷手段11と、第一リード12および第二リード13を介して、電極厚さ変化測定用セル10内の第一電極(図示しない)および第二電極(図示しない)に電気的に接続され、充放電を行う充放電装置14と、第一電極の充放電時の変位を測定する変位計15とを備え、測定電極台座3と第二硬質平板5との間隔は、第二電極4が膨張しても変化しない構成となっている。
(もっと読む)
位置姿勢出力装置、位置姿勢出力プログラム及び位置姿勢出力方法
【課題】移動体の正確な位置および姿勢を時間遅れなく出力する。
【解決手段】位置姿勢出力装置10は、移動体のオドメトリを計算する計算部3から、オドメトリを第1の間隔で取得する。オドメトリ及びオドメトリ以外の情報を用いて移動体の位置及び姿勢を推定する推定部5から、移動体の位置及び姿勢の推定結果を第1の間隔より長い第2の時間間隔で取得する。移動体の位置及び姿勢の推定結果が取得された場合に、更新後の移動体の位置及び姿勢の値が、オドメトリの差分に基づく位置及び姿勢と、移動体の位置及び姿勢の推定結果との間に遷移するように、記憶部13に記憶された移動体の位置及び姿勢を更新する。オドメトリが第1の間隔で取得される度に、当該オドメトリと今回の推定に用いられたオドメトリとの差分を記憶部13に記憶された移動体の位置及び姿勢に足し合わせた上で出力する。
(もっと読む)
3次元測定方法
【課題】 被測定物の形状を高精度で測定する3次元測定方法を提供する。
【解決手段】 ウエーハ上のアライメントマーク29の高さに合わせて、カメラ8のフォーカス高さをZ2軸ステージ9により調整する。このフォーカス高さに合わせて校正用アライメントマーク10の高さをZ3軸ステージ11により調整する。この状態で、校正用アライメントマーク10の中心位置を、カメラ8とプローブ1にて測定し、この2つのカメラ8とプローブ9の距離オフセット(Xo,Yo)を高精度に求める。このオフセットを用いて、カメラ8で測定したウエーハ上のアライメントマーク29の座標を、プローブ1の座標系に高精度に変換する。プローブ9でウエーハ上のレンズを測定すれば、ウエーハ上のアライメントマーク29位置を基準で高精度にレンズ中心を求めることができる。
(もっと読む)
改良された関節式アーム
【課題】高い正確度、高い信頼性および耐久性、相当な使い易さ、ならびに低コストを有す座標計測装置(CMM)を提供すること。
【解決手段】関節式アームCMMは、複数の伝達部材20と、少なくとも2つの伝達部材を互いに接続する複数の関節部材35と、遠端における座標取得部材と、近端におけるベースとを備える。関節部材の少なくとも2つは、少なくとも1つのエンコーダを備えることが可能であり、少なくとも2つのエンコーダは、ともに、単一のモノブロックハウジング内に収容されることが可能である。
(もっと読む)
座標測定機
【課題】より単純およびよりコンパクトであり、さらにデバイスのレギュレーション工程のより良い動的管理を与える測定機を提供する。
【解決手段】座標位置決め装置または座標測定機(CMM)は、TCP/IPインタフェース270上の外部デバイス600の接続を許容する個別の軸ドライバおよびプロキシモジュール275を駆動するように配置されたマイクロプロセッサ制御ユニット210を有する。外部デバイス600は、マイクロプロセッサ制御ユニット210に埋め込まれたhttpサーバ278によってユーザ相互作用に、または動的パラメータの調整および較正を含む高度なタスクに用いられる。
(もっと読む)
レール凹凸測定装置
【課題】レールの凹凸をレール長手方向に連続測定するレール凹凸測定装置を提供する。
【解決手段】測定レール(R1)上を走行可能な測定車両(10)と、測定車両(10)の進行距離を測定する距離センサ(31)と、測定車両(10)に取り付けられると共に測定レールの長手方向に不均等な間隔で順に直列に配置された第1、第2および第3の変位センサ(21、22、23)からなる変位センサ群(20)を有し、第1、第2および第3の変位センサ(21、22、23)のうち少なくとも1つの変位センサは位置について変更可能である。
(もっと読む)
21 - 40 / 753
[ Back to top ]