
Fターム[2F069HH11]の内容
測定手段を特定しない測長装置 (16,435) | 測定器機 (1,161) | エンコーダー (296)
Fターム[2F069HH11]の下位に属するFターム
Fターム[2F069HH11]に分類される特許
1 - 20 / 42
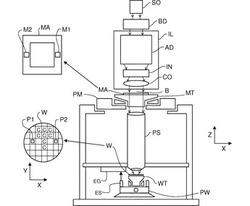
位置測定システム、リソグラフィ装置およびデバイス製造方法
【課題】従来の較正方法と比べてあまり時間がかからない較正を適用するより正確な位置測定システムを提供する。
【解決手段】位置測定システムは、第1部分EGおよび第2部分ESと、計算ユニットと、を備える。第1部分および第2部分は、第2部分に対する第1部分の位置を表す位置信号を提供することによって第2部材に対する第1部材の位置を決定する。計算ユニットは、位置信号を受信するための入力端子を含む。計算ユニットは、使用中、位置信号に変換を適用して第2部材に対する第1部材の位置を表す信号を得るように、および、変換に調整を適用して第1部分または第2部分あるいは両方のドリフトを少なくとも部分的に補償するように、構成される。調整は、第1部分または第2部分あるいは両方のそれぞれの所定のドリフト特性に基づく。所定のドリフト特性は、第1部分および/または第2部分の1つ以上の基本形状を有する。
(もっと読む)
レール凹凸測定装置

【課題】レールの凹凸をレール長手方向に連続測定するレール凹凸測定装置を提供する。
【解決手段】測定レール(R1)上を走行可能な測定車両(10)と、測定車両(10)の進行距離を測定する距離センサ(31)と、測定車両(10)に取り付けられると共に測定レールの長手方向に不均等な間隔で順に直列に配置された第1、第2および第3の変位センサ(21、22、23)からなる変位センサ群(20)を有し、第1、第2および第3の変位センサ(21、22、23)のうち少なくとも1つの変位センサは位置について変更可能である。
(もっと読む)
座標測定機
【課題】より単純およびよりコンパクトであり、さらにデバイスのレギュレーション工程のより良い動的管理を与える測定機を提供する。
【解決手段】座標位置決め装置または座標測定機(CMM)は、TCP/IPインタフェース270上の外部デバイス600の接続を許容する個別の軸ドライバおよびプロキシモジュール275を駆動するように配置されたマイクロプロセッサ制御ユニット210を有する。外部デバイス600は、マイクロプロセッサ制御ユニット210に埋め込まれたhttpサーバ278によってユーザ相互作用に、または動的パラメータの調整および較正を含む高度なタスクに用いられる。
(もっと読む)
計測装置
【課題】装置の高コスト化を抑えながら、被検面の形状を高精度に計測することができる技術を提供する。
【解決手段】被検物を保持する保持面を含む保持部と、被検面と被検面の形状を計測するための基準となる基準位置との間の距離を計測する距離計測部と、基準位置が被検面に沿うように距離計測部を駆動する駆動部と、駆動部によって駆動される距離計測部の基準位置を測定する位置測定部と、距離計測部によって計測された被検面と基準位置との間の距離と位置測定部によって測定された基準位置とに基づいて被検面の形状を算出する処理部と、を有し、位置測定部は、距離計測部に配置されて互いに異なる測定軸を有するレーザ干渉計と、レーザ干渉計のそれぞれからの光をそれぞれ反射する基準ミラーとを含み、レーザ干渉計の原点と基準ミラーとの間の距離を測定することで基準位置を測定し、基準ミラーの法線が保持面を含む面に交差するように配置される。
(もっと読む)
ワーク寸法測定装置
【課題】円形ワーク等を含む種々のワークの形状を短時間で簡易かつ正確に測定できるワーク寸法測定装置を提供する。
【解決手段】ワークWを挟んで両側に位置させられ、ワークWに向けて一定長の線状レーザ光Lを照射する一対のレーザ変位計4A,4Bと、これらレーザ変位計4A,4Bを互いに対向する方向で離間ないし接近方向へ移動させるスライダ機構2A,2Bと、ワークWに照射された線状レーザ光LがワークWの表面に線像を生じさせた際の移動距離に基づいてワークWの外形寸法を算出するパソコン6とを備える。ワークWは円形であり、その外周面に生じる線像は頂点を有する円弧状をなし、パソコン6は上記移動距離と頂点の位置に基づいてワークWの外径を算出する。
(もっと読む)
工作機械用測定方法
【課題】機械上の被加工物を工作機械の制御器に保存されたプログラムを利用して、高速に、正確に、且つ容易に被加工物を測定することを可能にする工作機械上の被加工物を測定する方法を提供する。
【解決手段】工作機械において、プログラム(12)は、被加工物Wの特徴を測定する走査プローブまたはアナログ・プローブPからデータを受け取る。このデータは、走査移動中に、前提の機械位置データと組み合わされる。このことは、実際に測定された位置データを得るために、サーボ・フィードバック・ループ(24)に割り込まなければならないことを防止する。前提の機械位置データは、走査移動を制御する部品プログラム(20)から引き出される。前提の機械位置の値と実際の値との間の誤差を補償するためにいくつかの方法が記載されている。
(もっと読む)
工作機械用測定方法
【課題】本発明は、工作機械上の被加工物を測定する方法及び装置を提供する。
【解決手段】工作機械において、プログラム(12)は、被加工物Wの特徴を測定する走査プローブまたはアナログ・プローブPからデータを受け取る。このデータは、走査移動中に、前提の機械位置データと組み合わされる。このことは、実際に測定された位置データを得るために、サーボ・フィードバック・ループ(24)に割り込まなければならないことを防止する。前提の機械位置データは、走査移動を制御する部品プログラム(20)から引き出される。また、いくつかの方法で前提の機械位置の値と実際の値との間の誤差を補償する。
(もっと読む)
測定システム
【課題】高速、かつ少ない振動およびエラーで部品表面の多数の座標ポイント取得できるようにする。
【解決手段】基準表面に対して可動サポートを位置決めするための1つ以上のアクチュエータとを含む測定システムであって、前記可動サポートが、サポートコネクタと、前記可動サポートと取り外し可能に接続された、前記基準表面に位置決めされたワークピースの表面の走査経路にある複数のポイントを測定するための走査プローブと、前記サポートコネクタと相互作用するように配置された、モジュラ回転取り付け具を前記可動サポートに接続させるための第1のコネクタ90、およびプローブコネクタと相互作用するように配置された、前記走査プローブを前記モジュラ回転取り付け具に接続させるための第2のコネクタ40を備えるモジュラ回転取り付け具と、前記第2のコネクタを前記第1のコネクタに対して回転させるためのアクチュエータ58とを有す。
(もっと読む)
座標位置測定装置による測定エラーの修正
座標位置測定装置のためのエラー修正方法を開示する。この方法は、(i)各々が第一の物体の表面上のある位置を表す1つまたは複数の第一のデータ値を含む第一のデータセットを取得するステップと、(ii)各々が第一の物体の表面上のある位置を表す1つまたは複数の第二のデータ値を含む第二のデータセットを取得するステップと、(iii)各々が、第一のデータセットにより説明される表面と第二のデータセットにより説明される表面の間の位置差を表す1つまたは複数のエラー値を含むエラーマップを計算するステップと、を含む。第一の物体の面法線が第一のデータ値の各々によって表される各位置において既知であり、ステップ(iii)は、実質的に既知の面法線の方向の位置差を判断することによって各エラー値を計算するステップを含む。加工または測定作業は、第一の物体または第一の物体と名目上同一の物体について実行され、その表面上の位置がステップ(iii)で計算されたエラーマップを使って修正される。 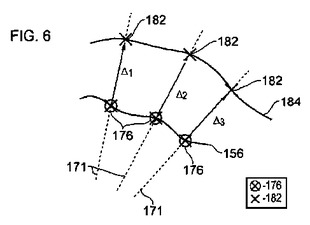 (もっと読む)
(もっと読む)
可搬型の関節アーム座標測定機および統合された電子データ処理システム
可搬型の関節アーム座標測定機の実装が、機能を実行する第1の要求を受信するステップを含む。可搬型のAACMMは、反対側にある第1の端部および第2の端部を有する手動で位置付けることが可能な関節アーム部であって、複数の接続されたアームセグメントを含み、各アームセグメントが位置信号を生成するための少なくとも1つの位置トランスデューサを含む、関節アーム部と、AACMMの第1の端部に装着された測定デバイスと、トランスデューサからの位置信号を受信し、測定デバイスの位置に対応するデータを提供する電子回路とを含む。可搬型の関節アーム座標測定機の実装は、第1の要求が受信される送信元デバイスを特定するステップと、第1の要求に従って機能を実施するステップと、第1のポートおよび第2のポートのうちのどちらから第1の要求が受信されるかを特定することによって、送信先デバイスを第1の要求の送信元デバイスとして選択するステップと、機能を実施することにより得られた情報を送信先デバイスに送信するステップとをさらに含む。 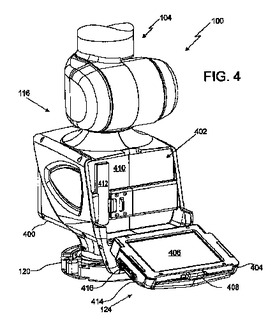 (もっと読む)
(もっと読む)
傾斜計を用いて関節アーム座標測定機の取り付けの安定性を評価するための方法
可搬型の関節アーム座標測定機が、基部と、反対側にある第1の端部および第2の端部を有する手動で位置付けることが可能な関節アーム部であって、複数の接続されたアームセグメントを含む、アーム部と、トランスデューサからの位置信号を受信する電子回路と、基部に結合された第1の傾斜計であって、基部の傾斜の角度に応じた第1の電気信号を生成するように構成された、第1の傾斜計と、第1の傾斜計の第1の読み取り値および第1の傾斜計の第2の読み取り値を記録するように構成された電気的システムであって、第1の読み取り値が、基部に加えられた第1の力および取り付け構造に加えられた第3の力のうちの少なくとも1つに応じたものであり、第2の読み取り値が、基部に加えられた第2の力および取り付け構造に加えられた第4の力のうちの少なくとも1つに応じたものである、電気的システムとを含む。 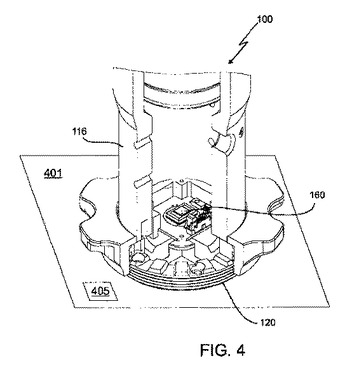 (もっと読む)
(もっと読む)
座標測定機用取付けデバイス
可搬型の関節アーム座標測定機用取付けデバイスが、提供される。取付けデバイスは、開口が中を貫いている本体を含む。へりが、開口の片側に配置され、へりは、座標測定機の基部部分のフランジに係合するように大きさが決められる。開口の一部は、外部の取付け具に結合するように構成されたねじ山を含む。第1のアームが、本体に結合され、第1の位置と第2の位置の間を第1の方向に回転するように構成される。 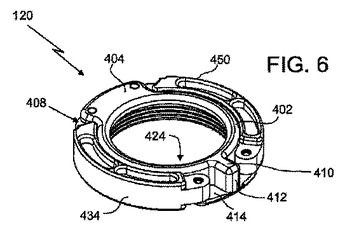 (もっと読む)
(もっと読む)
形状測定装置
【課題】被検物の形状測定において、測定プローブと被検物との位置合わせ作業を簡単に
行うことが可能な構成の形状測定装置を提供する。
【解決手段】被検物に対して光プローブ20を相対移動させて、光プローブ20により得
られた情報から被検物の三次元形状を非接触で測定するように構成された形状測定装置に
おいて、光プローブ20を被検物に対して所定の位置となるように移動させる門型構造体
10と、被検物を少なくとも2つの回転軸方向に回転させる支持装置30とを有して構成
される。
(もっと読む)
マルチバスアーム技術を用いた可搬型の関節アーム座標測定機
手動で位置付けることが可能な関節アーム部と、測定デバイスと、電子回路とを含む、マルチバスアーム技術を用いた可搬型の関節アーム座標測定機(AACMM)。電子回路は、アーム部からの位置信号を受信し、測定デバイスの位置に対応するデータを提供するように構成される。AACMMは、プローブ端と、アクセサリデバイスと、エンコーダデータバスと、第1のデバイスデータバスとをさらに含む。エンコーダデータバスは、アーム部および電子回路に結合され、エンコーダデータバスは、電子回路に位置信号を送信するように構成される。第1のデバイスデータバスは、アクセサリデバイスおよび電子回路に結合される。第1のデバイスデータバスは、アクセサリデバイスから電子回路にアクセサリデバイスデータを送信するために、エンコーダデータバスと同時に、エンコーダデータバスとは独立して動作するように構成される。 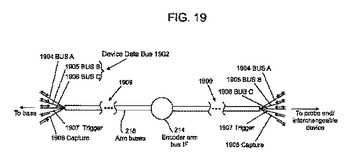 (もっと読む)
(もっと読む)
非接触型位置・姿勢測定方法及び非接触型位置・姿勢測定装置並びにこれを備えた半導体実装装置
【課題】測定対象物の位置・姿勢を直接測定して、精度の高い位置・姿勢の測定及び制御を可能にするとともに、測定対象物の位置・姿勢を非接触で測定することでモデル化を簡略にし、モデル化に起因した誤差を小さくすることを可能にした非接触型位置・姿勢測定方法及び非接触型位置・姿勢測定装置並びにこれを備えた半導体実装装置を提供する。
【解決手段】エンコーダ10の位置検出器15と距離計16、17が取り付けられた測定装置2と、測定対象物9に取り付けられたエンコーダ10のスケール11とを備えてなる非接触型位置・姿勢測定装置Bを用い、距離計16、17によって位置検出器15とスケール11の間隔及び平行度を測定し、間隔と平行度が一定となるように測定装置2のマニピュレータ13を制御し、測定装置2の位置情報と距離計16、17の計測値とエンコーダ10の計測値とを用いて測定対象物9の位置と姿勢を測定する。
(もっと読む)
ホーミング処理のためのガントリーステージ直交性誤差測定方法および誤差補正方法
【課題】本発明の課題は、ガントリーステージ直交性誤差に関連する問題を解決することである。
【解決手段】本発明によるホーミング処理のためのガントリーステージ直交性誤差測定方法および誤差補正方法は、直交性に構造的に一致するガントリーステージの現在位置のエンコーダ値を解読して記憶する工程と、ガントリーステージを低速で駆動している状態で、ガントリーステージのマスター軸およびスレーブ軸上にそれぞれ設定されたホーミング処理用のセンサまたはエンコーダのインデックス信号をモニタする工程と、インデックス信号が検出された場合、認知された位置のマスター軸またはスレーブ軸のリニアエンコーダ値を解読する工程とを備えていることを特徴とする。
(もっと読む)
測定器
【課題】セッティング時の使い勝手を向上させることができるとともに、測定値の信頼性を維持しつつ、有効測定範囲を最大限使用可能な測定器を提供する。
【解決手段】本体と、本体に対して移動可能に構成されたスタイラスと、本体に対するスタイラスの変位量を検出するエンコーダ12と、エンコーダ12により検出された変位量から測定値を演算する演算部13と、演算部13が演算した測定値を表示する表示部14と、演算部に指令を与える操作部15,16と、スタイラスの移動ストロークの下限値よりも大きく、かつ、上限値よりも小さい有効測定範囲を記憶した記憶部17を備える。演算部13は、エンコーダ12により検出された変位量が記憶部17に記憶された有効測定範囲内であるか否かを判定し、その判定結果を表示部に表示する。
(もっと読む)
関節部曲げ測定装置および曲げ測定方法
【課題】関節部曲げ測定装置を簡単な構成により小型化が可能で適用範囲が広く容易に機械的要素に対する安全性評価試験のデータを得ることができるようにする。
【解決手段】関節部曲げ測定装置10は、棒状の測定子本体部11と、この測定子本体部11の先端部にジョイント部19を介して回動可能に設けられた変位測定子12と、装置基体部15内に設けられたポテンショメータ13と、変位測定子12およびポテンショメータ13を連結する計測用ワイヤ14とを備える。計測用ワイヤ14は、測定子本体部11および変位測定子12に設けられた溝部17内に配されている。変位測定子12の角度変位量は、計測用ワイヤ14の移動量によりポテンショメータ13にて検出され、角度変換によって算出される。関節部曲げ測定装置10は、構成が簡単で小型化が図れるため、幼児の指先のような小さな部位を想定することができる。
(もっと読む)
モジュール式キャリブレーション方法
【課題】座標測定機の使用の際の障害を減らし、大量のキャリブレーションデータを管理する重荷を軽減する。
【解決手段】複数のサブシステム(10)から成り、サブシステム(10)の一部を個別にキャリブレーションし、その後、各サブシステム(10)に個別のキャリブレーション情報を提供し、マップ・ファイル(20)を生成し、キャリブレーションされたサブシステム(10)に関連づけられる、座標測定機を取り付ける手順に先立つ、事前のキャリブレーション手順と、前記キャリブレーション情報を保存する保存手順と、前記事前のキャリブレーション手順を通じて収集された前記キャリブレーション情報を処理する最終調整手順とから構成する。
(もっと読む)
シリンダボアの測定方法及び測定装置
【課題】エンジンのシリンダボアの真円度等を測定する際、シリンダヘッドとベアリングキャップ部材とをシリンダブロックに締結し、実際のエンジンの作動状態に近似させた状態で測定を行って、エンジンの作動状態における正確な真円度の測定データを得る。
【解決手段】測定するエンジンのシリンダブロック1に、シリンダヘッド3とベアリングキャップ部材とをボルトにより組み付けてシリンダ組立体9とする。これをベアリングキャップ部材8が上側となるように設置し、ウォータージャケットに高温の流体を送り込む。この状態で測定装置20を組立体9の上方からシリンダボア2に挿入して測定することにより、エンジンの作動時の状態を再現し、内部応力や熱膨張の影響を反映した真円度を測定することができる。測定装置20を設置するため、主軸受部には載置ブロック21が掛け渡され、位置決めのため、シリンダボア2と合致する基準部材22が設けられる。
(もっと読む)
1 - 20 / 42
[ Back to top ]