
Fターム[2F129BB66]の内容
航行(Navigation) (246,646) | 測位技術 (39,762) | 測位補正 (8,659) | 補正タイミング (1,144) | 航行中 (529)
Fターム[2F129BB66]に分類される特許
241 - 260 / 529
ナビゲーション装置及びナビゲーションプログラム
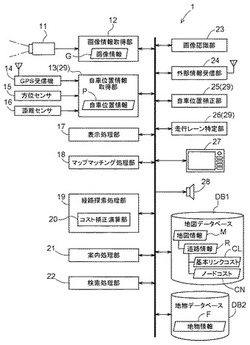
【課題】自車位置を高精度に特定することが可能な道路を優先的に通るような経路を探索することを可能とし、それにより使用者に対してより適切な案内を行うことができるナビゲーション装置等を提供する。
【解決手段】複数の道路リンクの接続関係により道路ネットワークを表す道路情報Rに基づいて出発地から目的地までの経路を探索する経路探索手段19を備えたナビゲーション装置1であって、経路探索手段19は、各道路リンクに設定されるリンクコストに基づいて経路の全体での合計コストが最小となるように経路探索を行う際に、自車両の位置を高精度に特定できる可能性がある道路リンクのリンクコストを他の道路リンクよりも相対的に小さく設定する高精度優先経路探索機能を備える。
(もっと読む)
立体地図表示ナビゲーション装置、立体地図表示システム及び立体地図表示プログラム

【課題】描画負担が低減するだけでなく、立体地図表示に関する総合的なコンピュータ負荷も低減する立体地図表示技術を提供する
【解決手段】道路データを格納する道路データベース21と立体物の立体図データを格納する立体図データベース22とを有する地図データベースと、道路データに基づいて設定された案内経路に関する経路情報を記憶する経路情報記憶部と、地図データベースにアクセスするとともに、案内経路と立体物との離散距離を演算し、離散距離に応じて簡略化された立体物に関する立体図データをバッファ部に転送する立体図データ読み込み手段6と、バッファ部7から取り出した立体図データに基づいて3次元の経路案内用地図画像を生成する地図画像生成手段と備えた立体地図表示ナビゲーション装置。
(もっと読む)
車載用ナビゲーション装置
【課題】運転者の運転技能に適応した誘導経路を設定することが可能な「車載用ナビゲーション装置」を提供すること。
【解決手段】車載用ナビゲーション装置は、表示手段と、ユーザが指示又は設定する情報を入力する情報入力手段と、制御手段を有する。制御手段は、自車両の現在地から情報入力手段を介して設定された目的地までの誘導経路に高速道路が含まれるとき、当該高速道路の所定の範囲内の複数の入口インターチェンジについて本線への合流の難易度を示す合流難易度を算出し(S15)、表示手段の画面に合流難易度とともに入口インターチェンジをリスト表示する(S16)。制御手段は、入口インターチェンジにおける助走路の距離、助走路の曲率半径、遮蔽物の高さ、及び合流地点の混雑状況について評価値を算出し当該評価値を基に合流難易度を算出する。
(もっと読む)
位置特定装置、コンピュータプログラム及び位置特定方法
【課題】歩行者の位置を精度良く特定することができる位置特定装置、コンピュータプログラム及び位置特定方法を提供する。
【解決手段】位置推定部171は、前回に算出された推定位置又は検出位置から測位位置までの測位軌跡に沿った軌跡を求めることにより、推定位置の軌跡及び推定位置を算出する。誤差算出部172は、位置推定部171で推定した推定位置の誤差範囲を算出する。属性判定部173は、誤差算出部172で算出した推定位置の誤差範囲内に存在する地図上の領域の属性を判定する。位置更新部175は、地図マッチング法を利用して、属性判定部173で判定した誤差範囲内の属性と位置推定部171で算出した推定位置とに基づいて、誤差範囲内で歩行していると考えられる位置に推定位置を更新し、更新した位置を歩行者の位置として検出(特定)する。
(もっと読む)
編隊飛行におけるスター・センサと光学式計測センサとの組合せにより改良された絶対ターゲット・システム
【課題】編隊飛行におけるスター・センサと光学式計測センサとの組合せにより改良された絶対ターゲット・システムを提供する。
【解決手段】本発明は天体観測衛星に組み込まれることを意図している絶対ターゲット・システムに関する。
最高の精度を備える絶対ターゲット・システムを確立するため、本発明はスター・センサ(4)を光学式計測センサ(5N、5R)と連結することを提案する。これら2つのアイテムの装置は特に編成飛行ミッションに対して、通常は衛星に既に搭載されているため、この解決策は追加の重量および費用を加えない。
(もっと読む)
位置特定装置、コンピュータプログラム及び位置特定方法
【課題】歩行者の位置を精度良く特定することができる位置特定装置、コンピュータプログラム及び位置特定方法を提供する。
【解決手段】歩行挙動判定部173は、歩行者の歩行挙動が横断歩道歩行又は踏切歩行の可能性があるか否かを判定する。可能性の有無は、例えば、歩行の開始、歩行の停止、歩行速度の変動等により判定することができる。位置特定部174は、歩行者の歩行挙動が横断歩道歩行又は踏切歩行の可能性がある場合、歩行挙動と交差点に設置された信号機の信号切替タイミング又は踏切に設置された警報タイミングとが合致するか否かを判定し、合致する場合には、歩行者の位置を横断歩道付近又は踏切付近に特定する。例えば、横断歩道を有する交差点に設置された信号機の青信号点灯開始時点に、歩行挙動が歩行開始であるとき、歩行者の位置を横断歩道付近に特定する。
(もっと読む)
ナビゲーション装置
【課題】景勝道路を経由する案内経路を探索する際に景勝道路の走行区間や出入口の設定等に対して煩雑な手間がかかることを防止して、容易かつ適切に案内経路を探索する。
【解決手段】ナビゲーション処理部42は、入力操作部14に対する操作者の入力操作に応じて目的景勝道路が設定されている場合には、目的景勝道路に対応する景勝道路の情報、および、景勝道路の出入口の情報からなる景勝道路情報を、景勝道路データ記憶部13から検索し、現在位置に近い入口(例えば、現在位置に最も近い入口)と目的地に近い出口(例えば、目的地に最も近い出口)とを取得し、これらの入口と出口との間の景勝道路の走行区間を経由して現在位置から目的地に到る経路を探索する。
(もっと読む)
測位装置
【課題】高い周波数で測位を行いつつも、そのような周期で測位を行った際に生じる測位精度の低下を抑制する。
【解決手段】GPS信号を用いて少なくとも2種類の周期でGPS測位を行うことができるように構成されたGPS測位手段と、所定の条件に基づいてGPS測位の精度が低いか否かを判定するGPS測位精度判定手段と、GPS測位の精度が低いと判定された場合には、GPS測位手段が第1の周期でGPS測位した結果に基づいて最終的な測位結果を計算し、GPS測位の精度が低くないと判定された場合には、GPS測位手段が第1の周期よりも短い第2の周期でGPS測位した結果に基づいて最終的な測位結果を計算する最終測位結果計算手段とから測位装置を構成する。
(もっと読む)
カーナビゲーションシステムおよび方法
【課題】車両に搭載されたカメラを用いて取得した画面に、対象地点を重ねて出力するための映像カーナビゲーションシステムおよび方法を提供する。
【解決手段】本発明に係る映像カーナビゲーションシステムは、カメラを用いて認識された信号灯の地図上の座標に対する対象地点の地図上の相対的な座標を用いて、対象地点を画面上に表示する。また、信号灯を基準として画面を複数の基準領域に分割し、対象地点の地図上の位置が信号灯の左右のどこに位置するかに応じて、また対象地点の地図上の位置が信号灯の地図上の位置に対する車両からの距離に応じて、対象地点をいずれか1つの基準領域に対応させる。対象地点の座標は、当該対象地点を代表的に表す座標と、その対象地点の出入口などを表す追加座標とを含む。
(もっと読む)
測位システム、端末装置、測位システムの制御方法、端末装置の制御方法、測位システムの制御プログラム及び端末装置の制御プログラム
【課題】GPS測位機能が組み込まれた端末装置をユーザの手に付けて歩行した場合、歩行に伴って手の位置が前後に振られるため、測位されたユーザの現在位置が微妙にずれることになる。
【解決手段】ユーザの歩行に伴い端末装置20が遥動状態にあるとき、遥動状態を検出した加速度センサ26aからの出力信号に基づいて、ユーザの腕が振られる基準周期時間29aを算出する。そして、端末装置20が遥動状態にあるときには、予め設定されている設定測位間隔29bを基に、基準周期時間29aの整数倍の時間の間隔で測位処理を行う。
(もっと読む)
経路探索装置、経路探索方法、プログラムおよび経路探索システム
【課題】位置情報が得られなくなってから位置情報が再度得られるまでに交通機関を利用した場合における移動経路を特定することが可能な経路探索装置、経路探索方法、プログラムおよび経路探索システムを提供する。
【解決手段】各交通機関の予め定められた各停止場所の位置および予め定められた経路を示す路線情報を記憶する記憶部と、位置を測定して位置情報を生成する第1測定部と、位置情報と位置情報が生成された時刻を規定する時刻情報とが対応付けられた測定データを記録する測定データ記録部と、第1測定部における位置情報の生成の状態を判定する状態遷移判定部と、状態遷移判定部の判定結果に応じ、路線情報と測定データとに基づいて、移動経路を特定する移動経路情報を生成する移動経路特定部とを備える経路探索装置が提供される。
(もっと読む)
ナビゲーション装置、ナビゲーション方法、及びナビゲーションプログラム
【課題】自車が走行中の案内画像のうち、自車の現在走行している車線側をより広く表示する案内画像の表示を行うことで、ユーザにとって利便性の高い案内を行うことができるナビゲーション装置を提供する。
【解決手段】ナビゲーション装置に向けられている。本発明は、自車が現在走行している道路の周辺の案内画像を表示する案内画像表示部と、自車が現在走行している道路のうち、現在走行している車線を特定する車線特定部と、車線特定部が特定した現在走行している車線に基づき、自車が現在走行している道路の周辺の案内画像のうち、当該現在走行している車線を中心に表示する案内画像よりも、当該現在走行している車線側を広く表示する案内画像を表示させる案内画像表示制御部とを備える。
(もっと読む)
ドライブプラン提供サーバおよびドライブプラン提供システム
【課題】経由する場所や地域も含めて、より利用者の嗜好にそった経路誘導を実行することができるドライブプラン提供システム10を提供する。
【解決手段】本発明のドライブプラン提供システム10は、経路の特徴を示す評価値に対応付けて、当該経路を再現可能な情報を含む経路情報を予めドライブプラン提供サーバ20に登録し、ユーザコンピュータ11を介して受け付けた評価値の条件を満たす経路情報を特定し、特定した経路情報をナビゲーション装置30に提供する。
(もっと読む)
測位システムおよび車載装置
【課題】車両の走行時における測位精度を向上させること。
【解決手段】車載装置は、測位した座標を表す車載側測位座標を含む車載側測位データを取得する車載側測位手段と、車載側測位手段が取得した車載側測位データを携帯端末装置へ送信する送信手段とを備え、携帯端末装置は、測位した座標を表す携帯側測位座標を含む携帯側測位データを取得する携帯側測位手段と、車載側測位手段および/または携帯側測位手段を測位環境に基づいて選択する選択手段と、選択手段によって選択された測位手段に係る測位座標に基づいて前記車両位置を算出する車両位置算出手段とを備えるように測位システムを構成する。
(もっと読む)
測位システムおよび車載装置
【課題】車両の走行時における測位精度を向上させること。
【解決手段】車載装置が、測位した座標を表す車載側測位座標および測位に係る精度を表す車載側測位精度を取得し、取得した車載側測位座標および車載側測位精度を携帯端末装置へ送信し、携帯端末装置は、測位した座標を表す携帯側測位座標および測位に係る精度を表す携帯側測位精度を取得し、車載側測位精度および携帯側測位精度に基づき、車載側測位座標および携帯側測位座標から車両位置を算出するように測位システムを構成する。
(もっと読む)
ナビゲーション装置および角速度検出信号補正値算出方法
【課題】車両の現在位置の算出精度を向上できるナビゲーション装置を提供する。
【解決手段】平均化する処理を行った操舵角検出信号の出力値に基づいて車両が直進しているか否かを判断し、車両が直進していると判断されると、ジャイロセンサ11aから出力される角速度信号のばらつきが小さければ、角速度信号の平均値を角速度信号の補正値ωaとして設定するように構成した。したがって、直進走行時のハンドルの遊びや操舵角検出信号の出力値の微少な変動の影響を抑制して車両が直進しているか否かを判断できるので、車両が直進しているときに角速度信号の補正値ωaを設定する機会を増やすことができる。これにより、車両の進行方位の算出精度、および、車両の移動量の算出精度を向上して、車両の現在位置の算出精度を向上できる。
(もっと読む)
走行経路検出用の車載器
【課題】車両が走行していった経路を、正確に判定する。
【解決手段】位置推定部115は、GPS受信器111,加速度センサ112,速度センサ113,ジャイロ114の情報を基に、車両が走行している位置を推定する推定位置(X,Y)を出力する。マップマッチング部116は、記憶部117に記憶している道路情報を参照してマップマッチング処理をして、マップマッチング位置(mX,mY)を出力する。バッファリング修正部200は、道路情報の経路(R)と節点(J)を基に、マップマッチング位置(mX,mY)が位置する経路が正しいものか否かを判定し、経路を誤判断した場合には、誤判断した経路上に位置するマップマッチング位置(mX,mY)の位置データを、最新の経路の入口に位置する節点(J)の位置情報に置き換える修正をする。これにより、走行経路を正確に検出することができる。
(もっと読む)
衛星測位装置
【課題】途切れなく測位を行うことのできる「衛星測位装置」を提供する。
【解決手段】P1まで進行した時点で、ナビゲーション装置11によって、近い将来の上方閉塞空間への進入が予測されたならば、アシスト測位制御部15は、無線通信装置17とGPS受信機16を制御して、GPS受信機16と測位サーバ4との接続を確立する。そして、その後、地点Sで上空閉塞空間400に進入し、上空閉塞空間400内をP2まで進んだ時点で、GPS受信機16のCN比が劣化し所定のしきい値TH未満となったならば、アシスト測位制御部15は、GPS受信機16にアシスト測位モードを設定する。アシスト測位モードを設定された、GPS受信機16は、地点P1で既に接続が確立している測位サーバ4から補助データの取得を直ちに開始して、ネットワークアシスト方式の測位を行う。
(もっと読む)
ナビゲーション装置、方法及びプログラム
【課題】ナビゲーション装置の技術において、容易かつ高精度に距離係数を補正すること。
【解決手段】道路設定手段20が、距離係数の補正に用いる道路である特定道路ごとに、開始地点と終了地点の位置座標並びに両地点間の本来の道路長について情報設定を受け付け、その情報を、記憶手段30の高精度距離情報データベース35に記憶させる。走行中には、判断手段45が特定道路の各端点すなわち開始地点及び終了地点について、自車位置到達を判断し、それに基づいて距離算出手段25が、特定道路の前記開始地点と前記終了地点の間について、前記距離係数に基づく走行長を算出する。補正手段40が、高精度距離情報データベース35に記憶されている前記道路長と、距離算出手段25で算出した前記走行長と、に基づいて、距離係数を補正する。
(もっと読む)
車両位置算出装置
【課題】 位置情報を取得した際の車両の向きによらず、現在の車両の位置を精度よく算出することができる車両位置算出装置を提供する。
【解決手段】 車両位置算出ECU1における進行方向検出部16は、受信エリア形状取得部12から出力された受信エリア形状情報、移動距離算出部13から出力された移動距離情報、および進路変更行動検出部14から出力された進路変更情報に基づいて、受信エリアにおける車両の進行方向を検出する。また、車両位置算出部17は、基準位置取得部11から出力された基準位置情報に基づいて基準位置(x,y)を設定し、相対位置変化検出部15から出力された相対変化情報に基づく相対変化(Δx,Δy)に、進行方向検出部16から出力された進行方向を加味して現在の車両位置を算出する。
(もっと読む)
241 - 260 / 529
[ Back to top ]