
Fターム[3C007BS15]の内容
マニピュレータ、ロボット (46,145) | マニピュレータの種類、タイプ (2,563) | 腕直列配列 (1,746) | 関節型 (1,487) | 水平多関節型 (420)
Fターム[3C007BS15]に分類される特許
41 - 60 / 420
アクチュエータ及び基板搬送ロボット
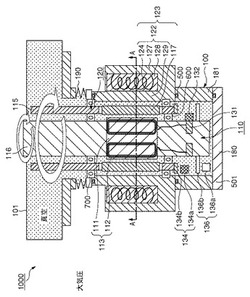
【課題】 内軸用のマグネットと外軸用のマグネットとを一体とすることで、低コストのアクチュエータを提供すること。
【解決手段】 アクチュエータは、中空構造を有し、中空構造の内側を真空排気可能に構成され、中空構造の外周側で第1コイル部を保持するハウジングと、ハウジングの内部において回転自在に支持され、外周に第2コイル部を有する内軸と、内軸の回転軸と同軸にハウジングの内部において回転自在に支持されており、内軸の外周側を囲むように配置されている円筒状の外軸と、外軸の外周側で第1コイル部に対向し、外軸の内周側で第2コイル部に対向する磁石と、内軸とハウジングの一方に設けられた整流子と、内軸とハウジングの他方に設けられ、内軸が少なくとも回転する際には整流子と摺接するブラシと、を備え、第2コイル部は、整流子とブラシを介して給電される。
(もっと読む)
産業用ロボット

【課題】アームを支持する支持部材を上下方向へ移動可能に支持する柱状部材を備えている場合であっても、比較的簡易な構成で、搬入される搬送対象物の位置ずれを抑制しつつその傾きを適切に補正することが可能な産業用ロボットを提供する。
【解決手段】産業用ロボット1は、搬送対象物が搭載されるハンド3と、ハンド3が連結されるアーム4と、アーム4を支持する支持部材6と、支持部材6を上下方向へ移動可能に支持する柱状部材7と、基台8と、柱状部材7の下端を支持するとともに基台8に対して回動可能な旋回部材9と、基台8に対して柱状部材7を上下方向に直交する所定方向へ相対移動させる移動機構10とを備えている。
(もっと読む)
ロボット装置およびロボット装置の制御方法
【課題】実作動時において基準となるセンサー検出データと比較し、その検出データの差分から確実な故障判断を行うロボット装置および制御方法を提供する。
【解決手段】アクチュエーターを含む連結装置によりアームが回転もしくは直線移動可能に連結されたロボット装置であって、アームに取り付けられた慣性センサーと、アクチュエーターに備える角度センサーからの回転角度データから、アクチュエーターの角速度および角加速度を演算する第1演算部と、慣性センサーにより検出された出力より、アームの角速度または角加速度を演算する第2演算部と、第1演算部により演算された角速度または角加速度と、第2演算部により演算された角速度または角加速度とを比較する比較部と、比較部においてアクチュエーターとアームの角速度または角加速度との差の絶対値が、閾値より大きい場合に慣性センサーが故障と判定する。
(もっと読む)
基板搬送装置、電子デバイスの製造システムおよび電子デバイスの製造方法
【課題】 より大きな駆動源、直動ガイド能力を必要とせず、小型化が可能な基板搬送装置を提供すること。
【解決手段】 基板搬送装置は、第1駆動軸と、第1駆動軸に一端が連結されたアーム部と、基板を保持することが可能な基板保持部と、アーム部の他端と基板保持部を連結する連結部と、を有する。連結部は、アーム部に対して基板保持部を回転可能に支持する回転支持部と、回転支持部によって基板保持部が回転する回転軸の方向に、アーム部に対して基板保持部を上昇させ、または、降下移動させる移動部と、を備える。
(もっと読む)
産業用ロボット
【課題】ハンドの先端と周辺機器とが衝突したときの衝撃が大きい場合であっても、ハンドの損傷を軽減することが可能な産業用ロボットを提供する。
【解決手段】搬送対象物2を搬送する産業用ロボット1は、搬送対象物2が搭載されるハンド3と、産業用ロボット1の周辺機器にハンド3の先端が衝突したことを検知するための検知機構とを備えるとともに、ハンド3が所定方向を向いた状態で略直線状に移動するように構成されている。ハンド3は、ハンド3の先端部分を構成するとともに周辺機器にハンド3の先端が衝突したときにハンド3の基端側に向かって移動可能な衝撃吸収部材20を備えている。
(もっと読む)
アクチュエータ及び基板搬送ロボット
【課題】 駆動機構の高さをコンパクトにしたアクチュエータを提供すること。
【解決手段】 アクチュエータは、第1ロータと、第2ロータと、ステータとを有する。第1ロータの回転軸を基準として、第1ロータおよび第2ロータおよびステータは同心円状に配置される。ステータは第1ロータと第2ロータとの間に配置されており、第1ロータと対向する第1コイルと、第2ロータと対向する第2コイルと、を有する。
(もっと読む)
アクチュエータ及び基板搬送ロボット
【課題】 駆動機構の高さをコンパクトにしたアクチュエータを提供すること。
【解決手段】 アクチュエータは、第1ロータと、第1ステータと、第2ロータと、第2ステータとを備える。第1ロータの回転軸を基準として、第1ロータおよび第2ロータは同心円状に配置され、第1ロータの回転軸を基準として、第1ステータおよび第2ステータは同心円状に配置されている。
(もっと読む)
水平多関節ロボットの座標値補正方法
【課題】高精度な水平多関節ロボットを実現する。
【解決手段】水平多関節ロボット10の座標値補正方法は、ガラスマスク80に設けられた基準マークP1,P2,P3位置をCCDカメラ40で画像認識して作用点の基準となるU軸中心を測定し、基準マークP1,P2,P3とU軸とが一致するまで第1アーム50と第2アーム60とを旋回させて、その移動量からロボット座標に対するガラスマスク80の傾きを算出し、ガラスマスク80の傾きを考慮して少なくとも2箇所の基準ロボット座標を算出し、前記基準ロボット座標に一致するまで前記U軸を旋回移動させてモデルポイントを作成し、そのときのロボット座標とモデルポイントとの座標差を算出し、この座標差を用いてアーム長誤差(ΔL1,ΔL2)と組み付け角度誤差(Δθ1,Δθ2)からU軸の座標補正値を算出し、座標補正値に基づきU軸の指令座標値を補正する。
(もっと読む)
干渉判定装置および干渉判定方法
【課題】干渉のない立体交差を考慮しつつも、干渉判定を短時間で行う。
【解決手段】
識別番号を各部位に割り当てる識別番号割当部421と、干渉情報を格納する干渉情報格納部412と、干渉条件情報を格納する干渉条件情報格納部413と、ロボットの動作する空間を2次元平面上に投影した上で、2次元平面をn1×n2のマス目に区切るマス目管理部424と、対応マス目を特定し、占有情報を対応マス目ごとに記録する占有情報記録部425と、占有情報および干渉条件情報の桁ごとの論理積を求め、論理積の全ての桁が「0」なら干渉無しと判断し、少なくとも一つの桁が「1」なら干渉有りと判断する判断部426と、を備える。干渉情報は、立体交差する際に干渉を伴わないなら「0」、干渉を伴うなら「1」を表す。
(もっと読む)
生産システム
【課題】ワークを把持したロボットが複数の処理装置間を順次移動してワークを製品化する生産システムにおいて、ロボットと処理装置との間のワークの授受位置を自動で効率的に取得可能とし、システムのフレキシビリティの向上を図る。
【解決手段】処理装置4は、指向性のある無線の通信部41を備え、ロボット3は、処理装置4の通信部41との間で相互に通信する指向性のある無線の通信部31と、処理装置4上の所定の特徴点42を撮像して位置認識を行う画像処理部(CCDカメラ32a)と、ハンド部33と、を備え、ロボット3は、相互の通信部31,41を用いて処理装置4に対する位置関係を検出し、その検出の後に、画像処理部を用いて特徴点42を認識することにより処理装置4に対する精密な位置関係を検出し、これに基づいてワークの授受位置を取得する。2段階の位置検出により、狭いカメラの撮像範囲で精度良く効率的に位置を取得できる。
(もっと読む)
スカラロボット
【課題】アームの上下のデッドスペースを低減したスカラロボットを得ること。
【解決手段】ベース10と、第1関節軸を介して水平面内で回動可能にベース10に連結された第1アーム1と、第2関節軸を介して水平面内で回動可能に第1アーム1に連結された第2アーム2と、第2アーム2の先端部に上下動するように設置された先端軸4とを備えたスカラロボットであって、ケーブル15を収容してベース10と第1アーム1との間に架け渡された第1ケーブルダクト11及びケーブル15を収容して第1アーム1と第2アーム2との間に架け渡された第2ケーブルダクト12を備え、第1、第2ケーブルダクト11、12の一端は第1、第2関節軸上に位置しており、第1及び第2ケーブルダクト11、12は、上下方向に関して先端軸4の可動域上下動の範囲内に収まるように設置された。
(もっと読む)
産業用ロボット
【課題】小型化が可能でかつパスラインを低くすることが可能な産業用ロボットを提供する。
【解決手段】産業用ロボット1は、本体部3と、第1アーム4と、第2アーム5と、第3アーム6と、本体部3と第1アーム4とを繋ぐ第1減速機21と、第1アーム4と第2アーム5とを繋ぐ第2減速機22と、第1減速機21の入力軸25と第2減速機22の入力軸32とを連結する連結機構23と、第3アーム6を回転駆動する第2駆動用モータ40とを備えている。産業用ロボット1では、第2アーム5と第3アーム6とを繋ぐ第3関節部の移動軌跡が直線状となるように、第1減速機21の減速比および第2減速機22の減速比が設定されるとともに、連結機構23が所定の速比で入力軸25と入力軸32とを連結している。また、第2駆動用モータ40は、第2アーム5の、第3関節部よりも先端側に、かつ、第1アーム4側へ突出するように第2アーム5に取り付けられている。
(もっと読む)
水平多関節ロボットおよびそれを備えた基板搬送システム
【課題】アームの駆動性を向上させて位置決めを向上させながらも、水平多関節ロボットのアームを薄型・小型化できるようにする。
【解決手段】第1アーム3が、第1アーム3の先端部上面において第1アーム3の基端側上面よりも高い面を有する第1アーム凸部43を有し、第2アーム27が、第2アーム27の先端部下面において第2アーム27の基端側下面よりも低い面を有する第2アーム凸部44を有し、第1アーム凸部43と第2アーム凸部44とが、上下方向の配置高さ範囲の少なくとも一部が互いに重なるように配置されるように構成した。
(もっと読む)
基板搬送ロボット
【課題】搬送ロボットを用いて、カセットに収容された液晶基板等の板状の基板を搬出する際に、基板検出センサを用いて基板の位置を検出していた。従来は、基板がカセットの手前側(入り口側)に寄せられてカセット内部に収容されていたが、基板がカセットの奥側に寄せられる場合があり、従来の搬送ロボットでは対応できない。
【解決手段】本発明の搬送ロボットは、ハンド4の先端付近に取り付けられた基板の有無を検出する基板検出センサ5と、ハンドの位置を移動させる移動機構11(アーム機構2等)と、ハンドの位置及び移動速度を制御する動作制御部12と、基板のエッジ位置を演算する基板エッジ位置解析部13とを備えた。上記構成にすると、基板がカセットの奥側に寄せられて収容された場合であっても、基板の位置を検出できる。
(もっと読む)
基板搬送システムおよび基板処理システム
【課題】ロボット設置領域を小さくして小型化を図ることが可能な基板搬送システムを提供する。
【解決手段】この基板搬送システム10は、アーム部(第1アーム部123および第2アーム部124)およびハンド部125を水平面内で回動させることによって、処理装置20側に設けられた開口部202を介して基板収納装置11内から処理装置20内に基板110を搬送するとともに、ハンド部125により基板110を支持した状態の最小旋回領域の外縁が開口部202を介して処理装置20内に突出するように構成された基板搬送ロボットを備えている。
(もっと読む)
ロボット。
【課題】ウェハー搬送工程において、クリーン雰囲気維持、スループット低下、及びコスト増の問題を解決して、半導体製造におけるスループット向上、及び不良率低下とコスト削減出来るロボットを提供する。
【解決手段】四つのアーム構造体ロボットにより、アームによる走行方向動作を可能にする事で、走行におけるクリーン気流の乱れを最小限に抑えると共に走行レールを工程から省く事で簡素化を実現した。また、運動速度の高速化も可能にした。
(もっと読む)
ウェハ搬送装置およびウェハ搬送方法
【課題】ウェハのデバイスが形成された面または形成される面に吸着痕や損傷を生じさせることなくウェハを搬送することができるウェハ搬送装置およびウェハ搬送方法を提供すること。
【解決手段】搬送ハンド30の内部には、段差部24に設けられた吸着孔32と、複数の通気用の孔31,33とが設けられている。段差部24は、リブウェハ10のデバイス面2と重ならない位置に設けられている。第1通気用の孔31は、吸着孔32に接続されている。各第1通気用の孔31同士は互いに独立している。各第1通気用の孔31には、異なる第2通気用の孔33が接続されている。各第2通気用の孔33は、それぞれ異なる配管25を介して真空発生源26に連結されている。つまり、複数の吸着孔32に対する真空系統が互いに独立して設けられている。リブウェハ10の吸着状態は、搬送ハンド30の内部に流れる空気の流速に基づいて判定される。
(もっと読む)
ロボットの重力補償機構
【課題】重力補償を行うエアシリンダ用の可動空間を小さくする。
【解決手段】上下方向に移動可能に設けられたシャフト5を収納する密閉筒体13を備え、この密閉筒体13に該密閉筒体13内にエアを供給・排気するエア供給排気部28を設けるように構成したので、シャフト5と密閉筒体(シリンダ本体)13が一体化し、別途設けていた重力補償を行うエアシリンダ用の可動空間を不要にできるから、エアシリンダ用可動空間を小さくすることができる。
(もっと読む)
関節装置及び基板搬送装置
【課題】俊敏な動作と高精度な位置制御を可能とする関節装置及び基板搬送装置を提供すること
【解決手段】本発明の関節装置は、第1の平行リンクと、第2の平行リンクと、伝達機構とを具備する。第1の平行リンクは、第1の支点を中心とする第1の回転が可能な第1のレバーと、第2の支点を中心とする第2の回転が可能な第2のレバーとを有する。第2の平行リンクは、第1の支点を中心とする第3の回転が可能な第3のレバーと、第2の支点を中心とする第4の回転が可能な第4のレバーとを有する。伝達機構は、第1の支点を中心として第1の回転と共に回転する第1のギアと、第2の支点を中心として第2の回転と共に回転する第2のギアと、第1のギア及び第2のギアに噛合して回転する第3のギアと、前記第3のギアの回転と第3の回転及び第4の回転とを同期させる連結部とを有し、第1の平行リンクの駆動と第2の平行リンクの駆動とを連動させる。
(もっと読む)
産業用ロボット
【課題】クリーンルームで使用可能でタクトタイムを短縮できる産業用ロボットを提供する。
【解決手段】ワークを載置するハンド8と、前記ハンド8を前記ワークの所定の位置から取り出しおよび供給するアーム2と、前記アーム2と上下移動機構11が支持部材10により連結され、前記上下移動機構11の下部に台座13が設けられ、前記台座13が旋回する基台14に振り子ストッパ17が備えられたものである。
(もっと読む)
41 - 60 / 420
[ Back to top ]