
Fターム[3C007CY00]の内容
マニピュレータ、ロボット (46,145) | 本体機構の目的 (1,591)
Fターム[3C007CY00]の下位に属するFターム
エネルギー供給 (611)
位置決め機構を有するもの (118)
直線移動機構レール、スライダ等の工夫 (70)
負荷平衡機構 (88)
防爆 (9)
防塵 (126)
防音、制音 (12)
防振 (29)
緩衝 (60)
絶縁、漏電防止 (3)
放熱・冷却 (54)
潤滑 (20)
小型化 (106)
保守性向上 (110)
腕の作動範囲の拡大 (67)
機敏性の向上、高速性の向上 (33)
Fターム[3C007CY00]に分類される特許
41 - 60 / 75
基板搬送装置

【課題】構成を複雑化することなく安定かつ高精度な搬送性を得ることができる基板搬送装置を提供する。
【解決手段】本発明に係る基板搬送装置は、一端が基台63の支持軸に支持され、他端が基板支持用のハンド62に接続された多関節アーム61と、ハンドの直線移動を案内するリニアガイド66と、ハンドをリニアガイドのガイドレール67aに沿って移動させるベルト76と、ベルトを駆動する駆動機構68と、ハンドとリニアガイドのスライダー67bとの間を連結する連結部材81とを備える。連結部材は、当該ハンドの進行方向に平行な第1の方向へのハンドとスライダー間の相対移動を規制し、かつ、鉛直方向に平行な第2の方向へのハンドとスライダー間の相対移動を許容する。
(もっと読む)
基板搬送装置

【課題】ハンドの原点位置において多関節アームの姿勢を安定に保持する。
【解決手段】一端が基台63の支持軸91に支持され、他端が基板支持用のハンド62に接続された多関節アーム61と、ハンドの直線移動を案内するリニアガイド66と、ハンドをリニアガイドのガイドレール67aに沿って移動させるベルト76と、ベルトを駆動する駆動機構68とを備え、多関節アーム61の第1アーム71A,71Bと第2アーム72A,72Bがほぼ平行となるハンドの原点位置で、支持軸91の周りへの多関節アームの回動を規制するロック機構100を備える。ロック機構100は、ロックバー101と保持アーム102の接触によってアームの回動規制を行う。ロックバー101は、ハンドがその原点位置から所定距離移動するまでの間にわたり、ベルト76と同期して移動するとともに、保持アーム102との接触状態を維持する。
(もっと読む)
移動ロボット用粉塵除去機構
【課題】移動ロボットの運転時間が長い場合であっても、小さな容量の圧力タンクで対応することができる移動ロボット用粉塵除去機構を提供する。
【解決手段】粉塵除去用のエアーノズル4と、圧力タンク5と、移動ロボット1の駆動エネルギーを利用して駆動するエアーポンプ6と、エアーノズルと圧力タンクとの間に介設された弁装置8と、圧力タンク5内のエアー圧を検知する圧力センサー9とが備えられ、制御機構部10により、圧力センサー9で検知されたエアー圧が所定の高圧圧力値に達したとき、弁装置8を開いてエアーノズル4から高圧エアーを吐出させ、吐出後、弁装置8を閉の待機状態に復帰させる制御が行われるようになされている。
(もっと読む)
エネルギー効率の良いロボットシステム
受動型の動歩行を伴うエネルギー効率の良い二足歩行のロボットシステムは、枠を有する本体を含む。エネルギー回復機構は枠内に懸架される。エネルギー回復機構は荷重、荷重と枠とを相互接続する機械的エネルギー蓄積機構、及び荷重と枠に固定されたガイド手段を含む。機械的エネルギー入力機構は荷重と電気エネルギー発生機構とを相互接続する。出力手段は生成された電気エネルギーをエネルギー蓄積装置に移す。ロボットはまた本体部分に接続された脚を含む。受動型の動歩行中の周期的な脚の運動は、機械的エネルギー蓄積機構を通じて荷重に伝達され、結果として生じる荷重の振動運動は、機械的エネルギー入力機構によって電気エネルギー発生機構に移される。 (もっと読む)
脚式移動ロボット
【課題】アクチュエータのパワーを高めることなく、前進方向への移動性能を向上させた脚式移動ロボットを提供すること。
【解決手段】本発明にかかる脚式移動ロボット10は、脚部における複数の関節のそれぞれに設けられたアクチュエータを駆動して揺動軸回りに動作させることによって歩行動作を行うものである。複数の関節のうち、例えば、腰ロール関節42の揺動軸を脚式移動ロボット10の前方向から45度に配置し、腰ピッチ関節43の揺動軸を脚式移動ロボット10の前方向から45度に配置する。
(もっと読む)
多関節ロボットおよびそのロボットの移送方法と設置方法
【課題】本発明は、ロボットを分解するとなく移送でき、容易に設置できる多関節ロボットを提供する。
【解決手段】搬送物を載置するハンド部8と、前記ハンド部8と連結され、少なくとも2つ以上の回転関節3、4、5を備え、前記ハンド部8を1方向に移動するように伸縮し、軸方向に対向するように配置された多関節アーム2と、前記多関節アーム2と上下に移動するコラム12に取り付けられた移動機構11とを連結する支持部材10と、前記移動機構11に備えられた旋回機能を有する台座13とからなる多関節ロボット1において、前記コラム12は、複数のコラムブロック16が連結されて形成されたものである。
(もっと読む)
移動するワークピースを加工するための加工システム
加工システム(10)が、産業用ロボット(16)によって、移動するワークピース(12)の加工を行い、産業用ロボット(16)を、ワークピース(12)及び/又は移動可能なワーク担持ユニット(14)に一時的に固定結合させることができ、産業用ロボット(16)は、非結合動作位置(42)で、能動的に作用する駆動ユニット(20)によってワークピースとは無関係に移動させることができる担持デバイス(18)によって担持され、結合動作位置(44)で、浮動軸受システム(22)によって、担持デバイス(18)に対して浮動に取り付けられ、さらに、産業用ロボット(16)の制御ユニット(36)及び/又は少なくとも1つの製造ユニット(40)が、担持デバイス(18)上に配置されることを特徴とする。 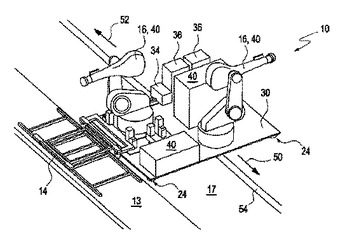 (もっと読む)
(もっと読む)
移動ロボットおよび移動ロボットの清掃方法
【課題】安価でかつ出入口を限定することなく移動ロボット表面の埃を除去し移動先の環境汚染を防ぐことができる移動ロボットおよび移動ロボットの清掃方法を提供する。
【解決手段】振動発生装置4を備え、振動発生装置4によって移動ロボット1の外装を振動させ、外装2に付着した埃6を除去する。または、アーム17は先端に把持部18を備え、把持部18によって清掃用具20を把持して移動ロボット1の外装2に接触させ、外装2に付着した埃6を除去する。
(もっと読む)
ロボット及びロボットのベースの製造方法
【課題】押出し加工を利用しつつ、回転動作に適した形状の筐体を実現できるロボットを提供する。
【解決手段】スカラロボット1は、ベース2と、ベース2に対して第1軸A1回りに回転可能な第1アーム3とを備え、ベース2の外形を構成する筐体8のうち第1軸A1に沿う外周部10は、第1軸A1の軸方向への押出し加工により形成されている。
(もっと読む)
清潔空間用ロボット
【課題】 大型の滅菌装置を用いることなく、効果的に滅菌可能なロボットを提供する。
【解決手段】 封止部188によって、清潔空間外107から清潔空間104内に汚染物質が侵入することを防ぐことができ、滅菌駆動部120を清潔空間104に配置し、動力伝達部121を清潔空間外107に配置することができる。滅菌駆動部120を動力伝達部121から分離させて、高温高圧滅菌することで、清潔空間104に属するロボット部分で雑菌が繁殖することを抑えて清潔空間104を清潔に保つことができる。また滅菌駆動部120を、動力伝達部121に対して分離することで、ロボット全体を滅菌する場合に比べて、小形の滅菌装置を用いて滅菌することができる。
(もっと読む)
機能可変型ロボットシステムおよび機能可変型ロボット制御方法ならびに機能可変型ロボット制御プログラム
【課題】無駄な機能を購入することなくネットワークを用いた簡単なシステムで多様な作業を行うことができる機能可変型ロボットシステムを提供する。
【解決手段】車輪を駆動して移動する自律移動型ロボット10と、当該自律移動型ロボット10に着脱自在に取り付けられ、所定の機能を実行する複数の機能モジュール20と、自律移動型ロボット10の移動を制御するパーソナルコンピュータと、複数の機能モジュール20の制御プログラムを格納しているデータベースと、複数の機能モジュール20の各々に付加され、当該機能モジュール20固有の情報を格納している記憶手段24と、自律移動型ロボット10に搭載され、記憶手段24に記憶されている当該固有情報を読み取り、当該機能モジュールを識別する識別手段14と、を備える。
(もっと読む)
走行型ロボット装置及びその制御方法
【課題】比較的重量物であるワークに対してもアームを肥大化させることなくコンパクト化を図ることができ、ワークの積み降ろしにかかるサイクルタイムを短縮することができる走行型ロボット装置及びその制御方法を提供すること。
【解決手段】複数のリンク機構(第一リンク機構11・第二リンク機構12)により水平方向に旋回可能及び伸縮可能に構成されるアーム7と、アーム7の先端部に設けられワークを支持するフォーク9(ワーク支持体)を支持するとともに昇降及び旋回させるロボットアーム20(昇降旋回手段)とを有するロボット6を、走行台5上に備える走行型ロボット装置1であって、フォーク9と連結され、該フォーク9の、ロボットアーム20による昇降動作、旋回動作及びアーム7の伸縮による水平方向の移動動作をアシストするアシスト手段30を設けた。
(もっと読む)
産業用ロボット
【課題】薄型ガラス基板等を搬送する産業用ロボットにおいて、制御軸数を増やす事無く、安価な方法で、上下軸の姿勢変化によるガラス基板の角度変化量を最少にする産業用ロボットを提供。
【解決手段】基台0上の第1軸aに回転移動する第1リンク 1・1と、基台0上に固定されたブラケット 0・1上の第2軸bにに回転自在に支持された第1補助リンク 1・2とが第1の平行4辺形を構成し、第1リンク 1・1先端部の第3軸cとに回転移動する第2リンク 2・1と、第1ヒンジ1上の第5軸eに回転自在に支持された第2補助リンク 2・2とが第2の平行4辺形を構成し、複数の平行四辺形リンクを直列に並べた形態で構成される上下軸において、1つ以上のリンク1・1、2・1 又は補助リンク1・2、2・2 の長さを意図的に短くし、又は、平行四辺形を成す1つの軸 a〜fの軸位置を意図的に変更した。
(もっと読む)
多関節型ロボット
【課題】大きな駆動力を発生する高価なモータを用いることなく、簡易な制御によって、半導体ウェハなどのワークを安定に搬送することが可能な多関節型ロボットを提供する。また、作業場所の省スペース化に資する多関節型ロボットを提供する。
【解決手段】多関節型ロボット1に、ワーク30を保持するハンド部7と、ハンド部7を回転可能に保持するアーム部6と、アーム部6の基端側を回転可能に保持するとともに、アーム部6の基端側の移動軌跡が、ワーク30をロード等する方向とはほぼ直交する方向の略直線となるように動作するリンク機構3と、アーム部6を、リンク機構3の移動に整合させてワーク30をロード等する方向に直線補間するように移動させる駆動手段と、を設け、基台側リンク部4の長さは、アーム部側リンク部5の長さよりも長く形成され、リンク機構3の基台2は、その中心位置がアーム部の基端側の移動軌跡上からずれた状態で配置されている。
(もっと読む)
把持部材移動方法及び装置
【課題】線状柔軟リンクの巻き取りとロボットアームの振りを協調的に行わせることにより、装置を大型化することなく把持部材に大きな瞬発力を与え、把持部材が床を引きずられることなく物体を移動させる方法及び装置を提供すること、ならびにリンクの剛性を可変にできる機構を提供する。
【解決手段】線状柔軟リンクの引っ張り動作と線状柔軟リンクの巻き取り動作を協調して行うことにより、線状柔軟リンクの先端の把持部材に把握された物体を移動させる。また、ロボット本体に設置された駆動関節に剛体アームを装着し、該剛体アームには線状柔軟リンクの巻き取り手段及び案内手段を設け、剛体アームの揺動と線状柔軟リンクの巻き取りとを協調して行う制御手段を設ける。
(もっと読む)
防水機構つきロボット
【課題】ロボット内部への液体の浸入を防ぐとともに、アームの位置決めを安定的にすることができ、さらに交換が簡単なロボットの防水機構を提供する。
【解決手段】ロボットのアーム116を支持するシャフト軸111とフランジ114との隙間から侵入する液体を防止する防水機構1として、フランジ114から突出した部分のシャフト軸111を、軸受13を介して回転可能に支持するハウジング部材12と、ハウジング部材12に一端面が固定され、他端面がフランジ114に固定され、上下に伸縮可能なジャバラ8と、からなる構成とした。
(もっと読む)
上下機構を備えた搬送ロボット
【課題】液晶などの搬送ロボットにおいて、剛性を向上させた上下機構を提供することよって、ロボットの倒れを防止できるようにする。また、剛性を向上させることにより、上下機構の加減速時間を短縮することで、ロボットのサイクルタイムを減少させる
【解決手段】上下機構には、水平方向に延在するベースアームと、その両端部に鉛直方向に立設された2本の上下軸アームと、2本の上下軸アームの各々に設けられた上下案内手段と、からなる複数の上下軸スライダ17、18、19を設けると共に、複数の上下軸スライダは、各々のベースアームの両端部が、他の上下軸スライダの上下案内手段に順次接続され、ベースアームには、前記2本の上下軸アームの各々に設けられた上下案内手段を駆動する駆動手段を設けた。
(もっと読む)
基板搬送装置
【課題】死点通過を円滑に行いながら、第2アームの過拘束を防ぐ。
【解決手段】本発明に係る基板搬送装置10は、第1アーム11と第2アーム21とが互いに平行となる死点位置を通過する時のみ、第2アーム21に対して回転力を付与する死点脱出機構15を備えている。死点脱出機構15は、第1アーム11を回転させる回動軸1の周りに設置された固定ギヤ16と、この固定ギヤ16に係合する第1回転ギヤ17と、この第1回転ギヤ17の回転力をリンク19を介して伝達される第2回転ギヤ18と、第2アーム21が死点位置を通過する時のみ第2回転ギヤ18と係合し第2アーム21に軸トルクを付与する係合ギヤ20とを備えている。この構成により、死点通過を円滑に行いながら、第2アーム21の過拘束を防止して基板の安定した直進性と搬送精度の向上を図ることが可能となる。
(もっと読む)
産業用ロボットのアーム機構
【課題】プーリ軸の剛性とプーリの取付強度を高め、アームの動作安定性を格段に向上できるようにした産業用ロボットのアーム機構を提供する。
【解決手段】産業用ロボットのアーム機構20を支持する固定部21と、固定部20に一端部が回動自在に連結された第1のアーム22と、この第1アーム22の他端部に回動自在に連結され、第1アームと同一のアーム長を有する第2のアーム23と、駆動モータの回転を前記第1アームに減速して伝達する減速機24と、第2アーム23の先端部が直線上を運動するように第1アーム22に連動させて第2アーム23を回動させる倍速伝達機構と、を備えたアーム機構20において、倍速伝達機構の駆動側の回転伝動要素30を、固定部20と一体でかつ減速機25を内包する中空構造部33に取り付ける。
(もっと読む)
産業用ロボット
【課題】平行リンク機構の平行度の調整を簡易迅速に行え、ロボットの運用を容易に行えるようにする。
【解決手段】固定ベース23に回動自在に支持された第1のレグ24と、第1レグ24に回動自在に支持された第2レグ25と、第2レグ25の先端部に回動自在取り付けられ、ロボットのアーム機構22を支持するアームベース26と、第1レグ24、第2レグ25にそれぞれ平行で、かつ、第1レグ24、第2レグ25、アームベース26とともに平行リンク機構を構成する第1および第2リンク部材27、28と、第1レグ24と平行な第1リンク部材27を固定ベース23に回動自在に連結する第1リンク連結部30と、第2レグ25と平行な第2リンク部材28をアームベース26に回動自在に連結する第2リンク連結部31と、を備え、第1リンク連結部30の取付位置を可動に構成する。
(もっと読む)
41 - 60 / 75
[ Back to top ]