
Fターム[3C034BB87]の内容
研削盤の構成部分、駆動、検出、制御 (11,657) | 構造 (3,536) | 補助装置 (169)
Fターム[3C034BB87]の下位に属するFターム
Fターム[3C034BB87]に分類される特許
21 - 40 / 131
研削加工装置及び研削加工方法
【課題】研削対象側の回転軸と砥石側の回転軸との軸ズレを抑制し、高精度な球面形状を得ることのできる研削加工装置を提供し、研削対象に球状面の研削を行う研削加工方法を提供すること。
【解決手段】軸ズレ調整部60が、研削対象10及び砥石部材20が支持された状態でズレ度合測定部50によって測定された軸ズレに応じた各回転軸RA1,RA2の位置の調整を可能にしている。これにより、研削加工時における回転軸の軸ズレを抑制することができるので、作業性を損なうことなく高精度な球状面を再現性良く得ることができる。
(もっと読む)
高周波数振動・電解ハイブリッド内面研削盤及びその研削方法

【課題】内面研削加工を高精度・高能率化することができ、かつ生産コストの低減にも寄与することができる内面研削盤及び高周波数振動・電解ハイブリッド内面研削方法を提供する。
【解決手段】導電性を有する工作物Wの加工孔Waの内周面を研削砥石3により研削する内面研削盤において、砥石軸方向に高周波数振動する高周波数振動発生器41を備えた高周波数振動ユニットに接続された研削砥石3と、工作物が陽極、研削砥石が陰極となるように電圧を印加しつつ工作物と研削砥石の間に電解液7を供給して電解加工するための電解電源6とを備え、研削砥石を高周波数振動させながら工作物の加工孔の内周面を研削する高周波数振動援用研削加工と、工作物と研削砥石間に電圧を印加して加工孔の内周面を溶解させながら研削する電解研削加工とを順次又は同時に選択的に行う。
(もっと読む)
ロール研磨装置及びロール研磨方法
【課題】搬送用ロールの温度が変化した場合であっても押疵欠陥が発生することを抑制すること。
【解決手段】制御装置11が、電流負荷センサ8によって検出されるモータ3の電流負荷が温度センサ9によって検出された搬送用ロール20の温度に対応する所定の電流負荷範囲内になるように、搬送用ロール20に対する研磨ロール2の押込量を制御する。これにより、搬送用ロール20の温度が変化した場合であっても、押疵欠陥が発生することを抑制できる。
(もっと読む)
ブラシ研磨装置及びブラシ研磨方法
【課題】研磨ブラシの磨耗状態を正確に把握してドレッシング実施時期を設定することができ、研磨ブラシの磨耗による加工精度の低下を防止して、金属リングに対する高精度な研磨を施すことが可能となるブラシ研磨装置及びブラシ研磨方法を提供する。
【解決手段】リング回転手段により金属リングWを回転させ、研磨機構3により研磨ブラシ2を金属リングWの回転軌道を横切るように移動させる。研磨ブラシ2を構成している素線2aの先端部の磨耗形状を撮像手段20で撮像し、撮像された素線2aの先端部の磨耗形状に基づいて、判定手段23が研磨ブラシ2のドレッシング実施時期を判定する。
(もっと読む)
自動ドリル先端加工機
【課題】ドリルと砥石との相対位置検出時にドリルと砥石との衝突による損傷を防止する。
【解決手段】既定方向に移動自在に設けられかつ被加工材となるドリルWが把持されるチャックを有する主軸1と、既定方向に移動自在に設けられて主軸に把持されたドリルの先端にホーニングを形成するための加工を施す砥石4と、これら主軸と砥石とを既定方向に移動させるための駆動機構と、を具備する。主軸と一体に設けられてチャック内にあるドリル取り付け軸線と平行な位置関係に配置された計測用プローブ3と、主軸の移動範囲内に配置されてチャックに把持されたドリル及び計測用プローブを撮影する撮影カメラ20,21と、撮影カメラからのドリル及び計測用プローブの撮像情報並びに駆動機構からの駆動情報を取得し、それらの情報を基に、砥石によるドリルの先端にホーニングを形成する情報を駆動機構に発する制御手段と、を有する。
(もっと読む)
ウエハ処理方法およびシステム
【課題】本実施形態は、ウエハのような対象物を処理するのに使用するための方法及びシステム(120)を提供し、ウエハの研磨及び/又は研削を含む。
【解決手段】フロントエンドモジュール(124)は、保管装置(126)を連結し、処理のための対象物を保管する。フロントエンドモジュール(124)は、単一のロボット、搬送ステーション、及び複数のエンドエフェクタを備えることができる。処理モジュール(122)は、単一のロボットが対象物を保管装置から処理モジュール(122)へ供給するように、フロントエンドモジュール(124)と連結される。処理モジュール(122)は、回転テーブル、及び、供給された対象物を取り出しそして対象物を回転テーブル上で処理するキャリアをもつスピンドルを備える。
(もっと読む)
研削方法
【課題】 被加工物を研削して薄く加工しても割れが生ずることのない被加工物の研削方法を提供することである。
【解決手段】 研削砥石を有する研削ホイールで被加工物を研削する研削方法であって、研削を実施中に、研削砥石の端面の下に被加工物が侵入する研削砥石に対する被加工物の少なくとも入口側で被加工物上に圧力を付与する。これにより、研削砥石に対する該入口側の被加工物を該端面の下の被加工物に対して平坦にしつつ研削を遂行する。
(もっと読む)
ワーク切削ラインの表示方法
【課題】半導体ウェハのようなワークでの切削ラインの位置を直観的に認識し易くし、切削ラインの位置の確認を混乱せずに確実に行えるようにする。
【解決手段】第1カメラ22で撮影したワーク全体を映し出す広範囲画像および第2カメラ24で撮影した前記ワークの一部を拡大して映し出す高倍率画像であって工作機械の制御軸座標との対応関係が既知の画像を画像処理装置28により生成し、工作機械の制御装置に記憶しているワークの切削位置データに基づいて画像処理装置により切削ラインの描画データを生成し、ワークの広範囲画像および高倍率画像に切削ラインを重ね合わせてディスプレイ装置30に表示する。
(もっと読む)
眼鏡レンズ供給システム
【課題】 システムの大型化、設置スペースの増大を抑え、経済的に有利する。
【解決手段】
1つのコンベアラインユニットは、コンベアラインと、1台の加工装置に対して少なくとも2つのトレイをコンベアラインから離脱させて待機位置まで移動させ、加工済みレンズが入ったトレイをコンベアラインに載せるトレイ移動ユニットと、レンズを加工装置に供給し、加工されたレンズをトレイに戻すロボットシステムと、トレイの識別情報を得る個別制御ユニットと、を有し、複数のコンベアラインユニットが並べられたときに、コンベアラインが1本のコンベアラインのように接続され、主制御ユニットは、各個別制御ユニットと通信し、搬入用コンベアラインのトレイを何れのコンベアラインユニットに搬送するかを決める。
(もっと読む)
透明板状物のエッジ検出装置及び研削装置
【課題】 透明板状物の外周エッジを的確に検出できるエッジ検出装置を提供することである。
【解決手段】 第1面及び該第1面と反対側の第2面を有する透明板状物のエッジを検出するエッジ検出装置であって、透明板状物より小さい支持面を有し該支持面で透明板状物の該第1面側を支持する支持台と、該支持面より下方に配設されて該支持台で支持された透明板状物の該第1面に向かって光を照射する光源と、該光源と該支持面との間に配設されて該光源から透明板状物の外周エッジに照射される光を遮光するとともに、該支持台を囲繞する透明板状物のサイズより小さい開口を備え、該開口を通して該光源から照射された光の一部を透明板状物に照射するマスク部と、該支持面に対面して配設されて該光源からの光が照射された透明板状物の第2面側を撮像する撮像手段と、該撮像手段で撮像された撮像画像に基づいて透明板状物の外周エッジを検出するエッジ検出部を有する制御手段と、を具備したことを特徴とする。
(もっと読む)
円筒状単結晶シリコンインゴットブロックを四角柱状ブロックに加工する切断装置および切断方法
【課題】 円筒状シリコンインゴットの側面剥ぎ切断装置上で、円筒状単結晶シリコンインゴットの結晶方位を正確に検知する方法および外周刃の横揺れ幅を小さくすることができる自己補償機構の提供。
【解決手段】 加圧冷却液供給パッド一対96p,96pを外周刃91aを挟んで外周刃の前面および後面に設け、ポンプ96pより供給される加圧液体の供給管を2分岐し、分岐された供給管のそれぞれの先端を前記一対の加圧冷却液供給パッドの液体貯め空間に望ませた外周刃横揺れ自己補償機構96。および、レーザ光反射型変位センサsを用い、円筒状単結晶シリコンインゴットの結晶方位を正確に検知する。
(もっと読む)
チャックテーブル機構
【課題】チャックテーブルを冷却する機能を備えたチャックテーブル機構を提供する。
【解決手段】チャックテーブル6と、冷却媒体供給手段7とを具備するチャックテーブル機構5であって、チャックテーブル6は、保持テーブル61と、支持部材62とを備え、支持部材62には冷却媒体を流す冷却媒体流通路622の一端に連通する第1の連通路633と他端に連通する第2の連通路634とが設けられており、冷却媒体供給手段7は、冷却媒体冷却手段71と、冷却媒体を送給するポンプ72と、冷却媒体送出管73と、冷却媒体戻し管74と、冷却媒体送出管73と第1の連通路633とを連通するとともに第2の連通路634と冷却媒体戻し管74とを連通する第1の形態と、冷却媒体送出管73と該第2の連通路634とを連通するとともに第1の連通路633と冷却媒体戻し管74とを連通する第2の形態とに切り替え可能な切り替え弁75とを具備している。
(もっと読む)
研削装置
【課題】厚さ測定用の検査用光線が透過する窓部とワークとの間に液体を供給することを停止した際に、外部の空気が窓部の表面に到達することを抑える。
【解決手段】厚さ測定時には液体源51から第二のケース42内に水Wを供給して第一のケース41の窓部412とワーク1との間に液体クッションW1を形成し、非接触測定手段40の発光受光部43から発せられる検査用光線を、窓部412および液体クッションW1を通してワーク1に発する構成において、厚さの測定が終了して液体源51から第二のケース42への水Wの供給を停止した際には、気体源52から第二のケース42内に空気を供給して窓部412をエアーブローし、第二のケース42内に外部の空気が流入しにくくする。
(もっと読む)
切削ブレード検出機構
【課題】増幅器から出力される電気信号が一定値になるように自動的に調整可能な切削ブレード検出機構を提供する。
【解決手段】切削装置で使用される切削ブレード検出機構であって、発光素子66と、発光部70と、受光部80と、該受光部80で受光した受光量を電気信号へ変換する受光素子76と、該発光部70と該受光部80間に切削ブレード28が位置しない状態で該受光部80が受光した受光量を該受光素子76で変換した電気信号が第1の値となるように該発光素子66及び該受光素子76の経時劣化に応じて電気信号を増幅する増幅部82と、該増幅部82からの電気信号を受信する受信部88と、該受信部88で受信した電気信号が該第1の値になるように該増幅部82の増幅量を制御する増幅制御部90と、該増幅量が上限値に達した時に警告を発するとともに該増幅部82の該上限値以上の増幅を禁止する警告発信部92とを有する制御手段86と、を具備する。
(もっと読む)
被研磨体吸着治具及びガラス基板の製造方法及び磁気記録媒体用ガラス基板
【課題】本発明はガラス基板を吸着する際の痕跡を減少させることを課題とする。
【解決手段】被研磨体吸着治具10は、シリンダ60と、操作部材70と、バネ部材80と、台座90と、吸着パッド100とを有する。操作部材70は、被押圧操作部78が押圧操作されていないとき、被押圧操作部78がバネ部材80のバネ力によりシリンダ60のシリンダ室62より上方に突出する上動位置(負圧停止位置)に保持されている。そして、操作部材70は、被押圧操作部78がバネ部材80のバネ力に抗して下方に押圧操作されると、第2の連通孔76が負圧導入孔64に連通され、吸着パッド100の吸着面に負圧を導入する。また、操作部材70の押圧操作が解除されると、バネ部材80のバネ力により上動して第1の連通孔74が大気導入孔66に連通される上動位置に復帰する。
(もっと読む)
研削加工装置
【課題】研削加工装置の搬送ロボットの電池の残量がなくなることによって搬送ロボットにおける各軸の位置の記憶が消えないようにする。
【解決手段】主電池部55aの残量がなくなった場合等に使用する予備電池部55bを電池部55に備え、主電池部55aの残量がなくなった場合でも予備電池部55bからの電力供給によって記憶部54の記憶内容を維持し、搬送ロボット5の軸部51a〜51dの位置に関する情報が記憶部54において保持されるようにする。また、記憶部54への電力の供給源が主電池部55aから予備電池部55bに切り替わった際に予備電池部55bが使用されていることをオペレータに知らせる警告部57を備え、主電池部55aの残量が少なくなった場合又はなくなった場合に主電池部55aを迅速に交換することを可能とする。
(もっと読む)
ウェーハの芯出し装置、面取り装置及びウェーハの芯出し方法
【課題】簡易な構造で、ウェーハの芯出しを精度良く行うことができる低コストの芯出し装置、及びそれを用いた面取り装置を提供する。
【解決手段】位置決めカップ13がウェーハWを支持した支持具14に対して相対的に上方に移動することで、ウェーハWを位置決めカップ13のテーパー面11で支持し、ウェーハWを支持した時に、振動子12により印加された振動で、ウェーハWが前記テーパー面11を滑って位置決めされ、位置決めカップ13が支持具14に対して相対的に下方に移動することで、位置決めされたウェーハWを支持具14で支持することによりウェーハWの芯出しを行うものであるウェーハWの芯出し装置10。
(もっと読む)
ホーニング加工装置及びホーニング加工方法
【課題】面が湾曲しているボア部の加工において、加工量が検出できるホーニング加工技術を提供する。
【解決手段】砥石22よりヘッド本体30の先端側に配置される第1エアマイクロノズル11と、第1エアマイクロノズル11からヘッド本体30の基端側にホーニングヘッド一回転若しくは複数回転当たりの軸方向の送り量だけ離して配置される第2エアマイクロノズル12と、第1エアマイクロノズル11と被加工面との距離を検出する第1距離検出手段13と、第2エアマイクロノズル12と被加工面との距離を検出する第2距離検出手段14と、第1距離検出手段13で得られた距離と第2距離検出手段14で得られた距離との差を求める演算手段16とを備える。
【効果】様々な形状の被加工面に対して加工量の検出を行うことができる。
(もっと読む)
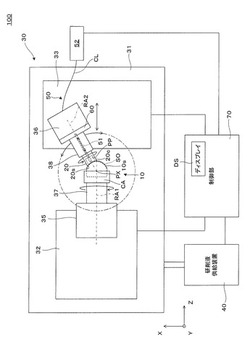
光学素子保持装置及び光学素子の製造方法
【課題】光学素子を研削・研磨加工する装置において、光学素子を容易に交換することができる光学素子保持装置等を提供する。
【解決手段】光学素子保持装置は、弾性部材2を介して光学素子1が支持される支持面10aを有する光学素子保持具10と、弾性部材を光学素子保持具に対して着脱自在に保持する弾性部材用真空系50とを備える。また、光学素子の製造方法は、弾性部材を介して光学素子を光学素子保持具に保持させる保持工程と、光学素子の加工面を加工工具に当接させる当接工程と、加工工具を回転及び揺動させることにより、加工面を研削・研磨加工する加工工程と、光学素子を加工工具から離す退避工程と、弾性部材を光学素子保持具に保持させた状態で光学素子を取り外す取り外し工程と、上記保持工程〜取り外し工程を所定回数繰り返した後で、光学素子保持具から弾性部材を取り外し、別の弾性部材と交換する弾性部材交換工程を含む。
(もっと読む)
半導体ウエハの研磨方法及び半導体ウエハ研磨装置
【課題】作業負担を増加させることなく、上下の回転定盤によりキャリアに保持された半導体ウエハの両面を研磨する際の、研磨の進行状況を正確に推定できる半導体ウエハの研磨方法及び半導体ウエハ研磨装置を提供する。
【解決手段】上下の回転定盤2、3によりキャリア6aに保持されたウエハWを挟持し、該上下の回転定盤2、3を回転動作させることにより、ウエハWの両面を同時研磨する研磨装置1を用いたウエハ研磨方法であって、ウエハWの両面を同時研磨している際の、研磨装置1の定盤負荷電流値をモニタし、前記モニタした定盤負荷電流値を用いて一定時間内における定盤負荷電流値の標準偏差を基準時間毎に算出し、前記標準偏差の時間当たりの変化パターンが所定関係を満足したときに、研磨の終了時点であると推定する。
(もっと読む)
21 - 40 / 131
[ Back to top ]