
Fターム[3D041AE31]の内容
駆動装置の関連制御 (32,328) | 駆動装置の関連制御、制御対象 (6,943) | 駆動装置 (6,172) | 変速 (1,291) | 最適ギヤ段、最適変速比 (935)
Fターム[3D041AE31]の下位に属するFターム
Fターム[3D041AE31]に分類される特許
21 - 40 / 615
車両の制御装置
【課題】車両の走行環境や運転指向をより的確に反映させて走行特性および人間の間隔に刺激を与える演出装置を制御する。
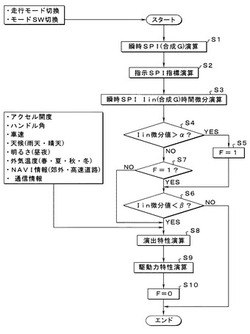
【解決手段】車両の走行状態に基づく指標を求め(ステップS2)、該指標に応じて前記車両の走行特性を変化させる車両の制御装置において、前記指標は、前記車両の挙動が機敏になるように前記走行特性を変化させる方向には前記走行状態の変化に応じて迅速に変化し、かつ前記車両の挙動の機敏さが低下するように前記走行特性を変化させる方向には前記走行状態の変化に対して遅れて変化する指標を含み、前記車両の運転者の五感の少なくとも一部に刺激を与える演出装置の出力内容を前記指標に基づいて変化させる(ステップS8,S9)ように構成されている。
(もっと読む)
車両制御装置

【課題】運転者の意図に即した走行と燃費の向上を両立させることのできる車両制御装置を提供する。
【解決手段】車両の走行状態に基づく指標を求め、前記指標に応じて車両の走行特性を変化させる車両制御装置において、前記車両を機敏に走行させる方向への前記指標の前記走行状態の変化に対する変化を、前記車両の走行の機敏さを低下させる方向への前記指標の前記走行状態の変化に対する変化より遅くする指標設定手段(ステップS2)を有し、前記車両の駆動力源の出力を制御することに伴って、予め定めた範囲内で駆動力源の燃費エネルギ効率を変化させるように、前記指標に基づいて走行特性を補正設定するように構成された制御器(ステップS8)を備えている。
(もっと読む)
車体制振制御装置
【課題】車体振動抑制用エンジントルク補正量が制御分解能未満でも、変速により、車体振動抑制用エンジントルクを補正制御する。
【解決手段】サスペンション装置を介して車輪を懸架された車両のバネ上質量である車体の振動を、駆動力補正制御により抑制するための車体制振制御装置において、車体振動を抑制するための制振用駆動力補正量を演算して、駆動力補正制御に資する制振用駆動力補正量演算手段と、該手段で求めた制振用駆動力補正量が設定値未満であるとき、駆動力の伝達系における変速比をハイ側へ変更する変速比変更手段とを具備する。
(もっと読む)
自動車用駆動システム及びその制御方法
【課題】減速時などに省エネのためエンジン停止制御指令を発してから実際にエンジンが止まるまでのエンジンからワンウェイ・クラッチの入力部材までの慣性力を有効利用する。
【解決手段】第1のエンジンENG1の下流側に、無限・無段変速機構BD1よりなるトランスミッションTM1が設けられ、その出力側にワンウェイ・クラッチOWC1が設けられ、第1のエンジンの出力軸にサブモータジェネレータMG2が接続された駆動システムにおいて、減速時などにエンジンを停止させる制御が実行された際に、実際にエンジンが停止するまでのエンジンからワンウェイ・クラッチの入力部材までの慣性力を、無段変速機構BD1の変速比可変機構112の駆動操作のアシスト力として利用すると共に、サブモータジェネレータMG2により電気エネルギーとして回生させる。
(もっと読む)
車両の制御装置
【課題】車両の走行環境や運転者の嗜好・走行意図を車両の挙動の制御特性により的確に反映させるとともに、制御の際の制御遅れを防止もしくは抑制して、運転者の満足度およびドライバビリティを向上させることのできる車両の制御装置を提供すること。
【解決手段】車両の走行状態に基づいて指標を求め、その指標に応じて車両の走行特性を変更するように構成された車両の制御装置において、前記走行特性を変更する際に目標とする目標特性を前記指標に基づいて設定し、その目標特性に実際の前記走行特性を追従させるように制御する走行特性制御手段(ステップS1,S2,S6)と、前記目標特性と前記実際の走行特性との乖離が大きい場合に、前記目標特性もしくは前記指標を、前記目標特性が前記実際の走行特性に近づくように補正する目標特性補正手段(ステップS3,S4,S5,S6)とを設けた。
(もっと読む)
変速制御装置
【課題】アップシフト制御中にアクセル開度が低開度状態に変化した場合でも、入力部材の回転速度を精度良く制御でき、トルクショックが車輪側に伝達されることを抑制する。
【解決手段】回転電機を有する駆動力源に連結される入力部材と、車輪に連結される出力部材と、入力部材の回転速度を各変速段の変速比で変速して出力部材に伝達する変速機構と、を備えた変速装置を制御する変速制御装置であって、解放側の摩擦係合要素の油圧指令を制御する解放側油圧制御部と、駆動力源から出力される駆動力を増加させる駆動力増加制御の指示を行う駆動力増加制御指示部と、アクセル低開度状態である場合に、解放側の摩擦係合要素が解放状態であるか否かを判定する解放判定部と、を備え、解放状態でないと判定された場合に解放側要素の油圧指令を入力部材の回転速度の変化に応じて制御し、解放状態であると判定された場合に駆動力増加制御の指示を行う。
(もっと読む)
車両の動力伝達制御装置
【課題】AMTを搭載した車両において、登坂路上で車両が発進する際に発生し得る「後退期間」が比較的長くなる事態の発生を簡易な構成を用いて抑制すること。
【解決手段】発進時制御開始条件が成立すると(tA)、発進時制御が開始され、変速機の変速段が発進用の変速段(1速)に設定された状態で、エンジントルクTe及びクラッチトルクTcがそれぞれの所定のパターンに従ってフィードフォワード的に増大されていく。発進時制御開始後において検出される「変速機の入力軸の回転速度Ni」の推移に基づいて、車両が登坂路上にあるか否かが判定される。「車両が登坂路上にある」との判定がなされた場合(tB,tD)、その判定がなされた時点以降、エンジントルクTe、及びクラッチトルクTcが、前記所定のパターンに対してそれぞれΔTe,ΔTcだけ「かさ上げ」される。
(もっと読む)
苗移植機
【課題】本発明では、作業時の燃料消費を抑えた、低燃費の苗移植機を提供することを課題とする。
【解決手段】
走行車体2にエンジン20と油圧無段変速装置23を設け、走行車体2の後部に圃場に苗を植え付ける苗植付装置52を設け、油圧無段変速装置23の出力を切り替えて機体の前後進及び走行速度を操作する変速操作レバー8を設けた苗移植機において、油圧無段変速装置23に駆動容量を変更可能な可変アクチュエータ29を設け、走行車体2の走行状態を検知する第1走行検知部材14と第2走行検知部材9を設け、第1走行検知部材14の検知する走行状態に合わせて可変アクチュエータ29の駆動容量とエンジン20の回転数を制御する制御装置6を設けて構成する。
(もっと読む)
制動制御装置
【課題】車両が停止する直前に車両の減速度を低下して車両の揺り戻しを抑える制御において、上り坂で車両がずり下がってしまう可能性を低減することを目的とする。
【解決手段】車両が上り勾配道路において減速した場合t2〜t3に、車両の減速に伴いゼロに近づくブレーキ要求車軸トルク65を算出して揺り戻しを低減する。またその後の開始タイミングt3において、ブレーキ要求車軸トルク65の初期値B0、最終値B1、および補正期間tdを決定し、当該開始タイミングt3から補正期間tdの間、ブレーキ要求車軸トルクを初期値B0から最終値B1まで低下させる。また、車輪速センサ7の検出信号に基づいて検出した車両の検出車速が最後に検出限界最小車速Vc以上だった限界時刻t3以前における検出車速の変化に基づいて、車両の実車速がゼロになる停止時刻t4を推定し、上記開始タイミングt3から当該停止時刻t4までの期間を補正期間tdとする。
(もっと読む)
自律走行制御装置
【課題】緊急時に車両の状態に応じてより迅速かつ的確な走行制御を行うことが可能な自律走行制御装置を提供する。
【解決手段】自律走行ECU1では、車両の周囲の状況(相対位置情報)に応じて走行計画を設定すると共に、他のECUからの異常情報に基づいて車両を緊急停止させる必要があると判定した場合には、制御系統の異常部位以外の特定部位である使用可能部位と予め設定された緊急停止モードとから一意に決まる制御指針に従って、車両を停止させるための走行計画を再設定する。しかも、車両における乗員および危険物の有無の少なくとも一方の情報に基づいて緊急停止モードを選択し、車内優先モードまたは車外優先モードのいずれかを走行計画の再設定に反映させることにより、緊急時の車内の状況に応じて、車両と車両の周囲とのいずれかの安全を的確に重視した制御を行うことが可能となる。
(もっと読む)
車速制御装置
【課題】未知の負荷変動に対する応答性に優れた車速制御装置を提供すること。
【解決手段】目標駆動力(目標エンジン出力PeT )が、典型的なエンジン回転速度フィードバック制御にカスケードされた車速フィードバックから演算される。目標車速VT および実車速VR の偏差に基づく第1のフィードバック量FD1と、要求車速VS 及び実車速VR の偏差に基づく第2のフィードバック量FD2との加算値に基づいて、より大きな目標駆動力が演算される。第2のフィードバック量FD2は、要求される応答を実現するフィルタ(一次応答モデル、レートリミッタ等)によって要求車速を演算し、次いで、その要求車速と実車速を比較することで得られる。未知の負荷変動に対してエンジン出力の非常に迅速な補償を自動的に行い、車速を精度良く制御する。
(もっと読む)
車両駆動装置
【課題】ダウンシフト時にダブルクラッチ処理とブリッピング処理とギヤ段変更処理とを協調制御するための制御装置100,200を備える車両駆動装置において、前記ブリッピング処理によって変速機3の入力軸回転数が上昇し過ぎた場合でも、前記ブリッピング処理の後でギヤ入れ処理へ速やかに移行可能にするとともに、ギヤ入れ処理での常時噛み合い式の変速機3に備えるシンクロメッシュ機構34A〜34Cによる回転差吸収量を低減可能にする。
【解決手段】制御装置100,200は、前記ブリッピング処理を行うことによって入力軸回転数Niが目標範囲の上限値を上回った場合に、エンジン1をトルクダウンさせることによりエンジン回転数Neを速やかに低下させてから、摩擦クラッチ2を微継合させることにより入力軸回転数Niを低下させながらエンジン回転数Neを上昇させて、それら両方を前記目標範囲に収める補正処理を実行する。
(もっと読む)
車両の駆動力制御装置
【課題】何らかの原因によってアクセルペダルが戻らない事態に陥っても駆動力を十分に低減できる車両の駆動力制御装置を提供する。
【解決手段】アクセルペダル及びブレーキペダルの両方の踏み込みに基づいてフェールセーフ制御が必要であるか否かを判定するフェールセーフ判定部(110)と、アクセル操作量に基づいてエンジンを制御するための制御用アクセル操作量を設定し、フェールセーフ制御が必要であるときに制限された制御用アクセル操作量に基づいてエンジン出力を制限するエンジン制御部(130〜160)と、トランスミッションの変速比を設定する基本変速モードとその基本変速モードに比較して大きい変速比が選択される駆動力重視変速モードとを備え、フェールセーフ制御が必要であるときに駆動力重視変速モードを禁止して基本変速モードに制限して制御用アクセル操作量に基づいて変速制御するトランスミッション制御部(200)と、を備える。
(もっと読む)
制動制御システム
【課題】制動制御を行うときの車両の安定性を向上させることができる制動制御システムを提供すること。
【解決手段】車両の全車輪にそれぞれ配置された制動装置が車両に作用させる制動力である第一制動力、あるいは車両の動力源を車両の駆動輪に対する負荷とすることで車両に作用させる制動力である第二制動力の少なくともいずれか一方により車両を制動する制動制御システムであって、車両に要求される減速度である要求減速度を実現するときに車両に作用させる制動力における第一制動力と第二制動力との割合が、車両の挙動安定性に影響する走行環境(S510,S530,S540)に応じて変化する(S520,S550)。
(もっと読む)
車両制御システム
【課題】回生制御の開始や回生制御からの復帰による変速の頻度の増加を抑制可能な車両制御システムを提供すること。
【解決手段】エンジン20と、力行および回生が可能な電動機30と、エンジンおよび電動機と車両1の駆動輪との間で動力を伝達する有段の自動変速機40とを備え、エンジンを停止して電動機を動力源として車両を走行させる電動機走行を実行可能であり、かつ、電動機走行において、電動機の動作が力行あるいは回生の何れであるかにかかわらず所定の変速制御を実行するものであって、所定の変速制御は、電動機の回転数を回生の効率が高い回転数とする変速制御、あるいはエンジンを動力源として車両を走行させる場合よりも同じ車速における電動機の回転数を高い回転数とする変速制御の少なくともいずれか一方である。
(もっと読む)
車両の制御装置および制御方法
【課題】車両の走行環境や運転指向をより的確に反映した挙動特性とすることによりドライバビリティを向上させる。
【解決手段】駆動力源とその駆動力源の出力側に連結された変速機とを搭載した車両における前記駆動力源の回転数もしくは前記変速機の変速比を制御する車両の制御装置において、前記車両の走行状態に基づく指標を求めるとともに、その指標に基づいて前記駆動力源の要求回転数もしくは前記変速機に対する要求変速比を制御するように構成されている。
(もっと読む)
車両制御システム
【課題】燃費の向上を図ることができる車両制御システムを提供すること。
【解決手段】エンジンと、エンジンの出力する動力を車両の駆動輪に伝達する自動変速機とを備え、エンジンの出力トルクと回転数との関係を示す予め定められた所定動作線と、車両の加速度に関する目標値とに基づいてエンジンの目標トルクおよび自動変速機の目標変速比を決定し(54)、かつエンジンに目標トルクを実現させる指令であるトルク指令、あるいは自動変速機に目標変速比を実現させる指令である変速指令の少なくともいずれか一方に遅れ補償を施して出力する(54−56−58A,54−57−58B)ことが可能である。遅れ補償は、出力トルクおよび回転数を示す動作点が目標トルクおよび目標変速比に対応する目標動作点まで変化する過程において、遅れ補償が施されない場合よりも、動作点が所定動作線から離れることを抑制するものである。
(もっと読む)
車両の制御装置
【課題】車両の走行環境や運転指向をより的確に反映した走行特性とすることによりドライバビリティを向上させる。
【解決手段】車両の運動を示す車両パラメータに基づいて該車両の走行状態を示す指標が求められ、該指標に応じて該車両の走行特性を設定する車両の制御装置において、運転者の意図しない運転操作や走行路面の影響に起因して変動する変動成分を減衰させた前記加速度に基づいて前記指標を求めるノイズ除去装置を設けた車両の制御装置である。
(もっと読む)
車両走行制御システム
【課題】複数の曲線区間を有する走路において運転者の感覚に沿った車両の走行状態の制御が可能な車両走行制御システムを提供すること。
【解決手段】車両の走行状態を変更する走行状態変更手段と、コーナに応じて走行状態変更手段を制御する制御装置とを備え、制御装置は、直線路とみなす区間と、直線路とみなす区間によって接続される二つの曲線区間とを有する前方の走路に対して、運転者による走行履歴に基づき、二つの曲線区間の一方から他方に向けて直線路とみなす区間を走行する間に車両の挙動が安定すると予測される場合(S5−Y)には二つの曲線区間を互いに独立したコーナとして走行状態変更手段を制御し(S6〜S9)、走行履歴に基づき、直線路とみなす区間を走行する間に車両の挙動が安定すると予測されない場合(S5−N)には二つの曲線区間および直線路とみなす区間を一つのコーナとして走行状態変更手段を制御する(S10,S11)。
(もっと読む)
車両の制御装置
【課題】車両の制御装置において、車両の走行状態に拘らず燃料カット制御を適正に実行することで燃費の向上を可能とする。
【解決手段】エンジン11と自動変速機32を搭載し、ECU41として、エンジン11の回転数が予め設定された所定の燃料カット復帰回転数以上で且つアクセル開度が0のときに燃料供給を停止する燃料カット制御部51と、アクセルペダルが継続して踏込まれているアイドルオフ時間が予め設定された閾値より短いかどうかを判定するアイドルオフ時間判定部52と、エンジン11により駆動するエアコン38の作動を検出する補機作動検出部53と、車両の運転状態に応じて自動変速機32の変速段を設定すると共にアイドルオフ時間が閾値より短く且つエアコン38が作動するときに変速点を高回転側に変更する変速制御部54とを設ける。
(もっと読む)
21 - 40 / 615
[ Back to top ]